

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Tom[unit 1]
Similar a Tom[unit 1] (20)
Último
Último (20)
Tom[unit 1]
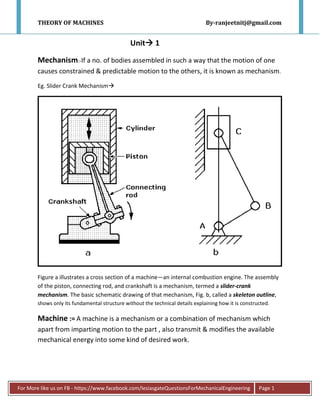
- 1. THEORY OF MACHINES By-ranjeetnitj@gmail.com Unit 1 Mechanism:-If a no. of bodies assembled in such a way that the motion of one causes constrained & predictable motion to the others, it is known as mechanism. Eg. Slider Crank Mechanism Figure a illustrates a cross section of a machine—an internal combustion engine. The assembly of the piston, connecting rod, and crankshaft is a mechanism, termed a slider-crank mechanism. The basic schematic drawing of that mechanism, Fig. b, called a skeleton outline, shows only its fundamental structure without the technical details explaining how it is constructed. Machine := A machine is a mechanism or a combination of mechanism which apart from imparting motion to the part , also transmit & modifies the available mechanical energy into some kind of desired work. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 1
- 2. THEORY OF MACHINES By-ranjeetnitj@gmail.com Note :There is a difference between a machine and a mechanism: All machines transform energy to do work, but only some mechanisms are capable of performing work. The term machinery means an assembly that includes both machines and mechanisms, means a machine would be always mechanism(s) but for a mechanism it is not always true, that it would be a machine. Resistant & Rigid Body:Rigid Bodies: - if a body does not suffer any distortion under the action of force or the distance between any two points on it remains constant on applying force or with time, then it would be a Rigid Body. Even though such an object cannot physically exist Resistant Bodies: - A body which only behave as Rigid in some circumstances or bodies which are rigid for the purpose they have to serve for. E.g. Belt Drive, where belt is rigid when subjected to a tensile force. Link:- A link is defined as a Rigid/Resistant body is having two or more pairing elements which connect it to other bodies for the purpose of transmitting force or motion. Means to say a Rigid/Resistant body only would not be a link until it is not attached to another body by a joint. OR A Resistant Body or a group of resistant bodies with rigid connections preventing their relative movement is known as link. A Link may be consisting of one or more resistant bodies. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 2
- 3. THEORY OF MACHINES By-ranjeetnitj@gmail.com The links are classified depending on number of joints:- 1.Singular Link A link which is connected to only one other link is called a singular link Figure : Singular Link 2. Binary Link A link which is connected to two other links is called a binary link Figure : Binary Link f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 3
- 4. THEORY OF MACHINES By-ranjeetnitj@gmail.com 3. Ternary Link A link which is connected to three other links is called a ternary link Figure : Ternary Link 4. Quaternary Link A link which is connected to four other links is called quaternary link. Figure : Quaternary Link DEGREE OF FREEDOM The degree of freedom of a body is equal to the number of independent coordinates required to specify the movement. For a cricket ball when it is in air, six independent coordinates are required to define its motion. Three independent displacements coordinates along the three axes (x, y, z) and three independent coordinates for rotations about these axes are required to describe its motion in space. Therefore, degree of freedom for this ball is equal to six. If this cricket ball moves on the ground, this movement can be described by two axes in the plane. When the body has a plane surface to slide on a plane, the rotation about x and yaxes shall be eliminated but it can rotate about an axis perpendicular to the plane, i.e. z-axis. At the same time, while executing plane motion, this body undergoes f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 4
- 5. THEORY OF MACHINES By-ranjeetnitj@gmail.com displacement which can be resolved along x and y axis. The rotation about z-axis and components of displacement along x and y axes are independent of each other. Therefore, a sliding body on a plane surface has three degrees of freedom. These were the examples of unconstrained or partially constrained bodies. If a cylinder rolls without sliding along a straight guided path, the degree of freedom is equal to one only because rotation in case of pure rolling is dependent on linear motion. Degree of Freedom = 6- No. of Restrains The No. of Restrains can never be Zero or Six. Analyzing Degree of Freedom in Mechanisms:1. Kutzbach criterion:-In the Kutzback criteria the DOF analyze by a Simple FormulaF=3(N-1)-2j-h-fr Where, F: Degree of freedom N: Number of links j: Number of binary(Lower) pairs or binary joints (i.e. single degree of freedom pairs) h: Number of higher pairs (i.e. two degree of freedom pairs), fr : Redundant Degree of Freedom Redundant Degree of Freedom:- a redundant degree of freedom is happen when one or more links of a mechanism can be moved without causing the motion of the rest, the effect of this Redundant term is ;it will cause of decrease in resultant DOF 2. Gruebler’s Criterion:If in a mechanism one link is fixed then no. of moveable links would be N-1; so for N-1 links the available Degree of Freedom = 6(N-1) [3 translation & 3 rotation ] Now from the basic formula the DOF is analyze from only 2 things 1. No of links & 2. No of Restrains so now we will analyze the No. of Restrains for 6(N-1) DOF. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 5
- 6. THEORY OF MACHINES By-ranjeetnitj@gmail.com No. of Restrains:-no. of Restrains means the simply no. of the Restricted Coordinates for Movements; the Restrains are as followsFor the kinematic pair having 1 DOF the Restriction/Restrains 6-1= 5 If there are P1 such pairs so no. of Restrains = 5P1 Same as kinematic pairs having 2,3,4 & 5 DOF will have Restrains 4,3,2 & 1 accordingly. If there are P2,P3,P4,P5 Such pairs then Restrains would be 4P2,3P3,2P4,1P5 SO FROM HERE:DOF F= 6(N-1)-5P1-4P2-3P3-2P4-1P5 P1 :- No. of Kinematic pairs having one DOF P2:- No. of Kinematic pairs having two DOF P3:- No. of Kinematic pairs having three DOF P4:- No. of Kinematic pairs having four DOF P5:- No. of Kinematic pairs having five DOF the above criteria is for 3D Mechanism but most of the mechanism are two dimensional such as four link or a slider crank mechanism in which displacement is possible along two axes(one Restrains) and rotation about only one axis (two Restrains); thus there are three general Restrains. Hence DOF F= 3(N-1)-2P1-1P2 This is known as Gruebler’s criterion for DOF of plane mechanism. 3. When there are Loops & links given:When there is easy to find out loops in a mechanism; then most suitable formula for finding DOF is F= N-(2L+1) N- no. of links; L= No. of loops in the mechanism KINEMATIC PAIRS In a mechanism, bodies or links are connected such that each of them moves with respect to another. The behavior of the mechanism depends on the nature of the f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 6
- 7. THEORY OF MACHINES By-ranjeetnitj@gmail.com connections of the links and the type of relative motion they permit. These connections are known as kinematic pairs. Hence kinematic pair is defined as a joint of two links having relative motion between them. Broadly, kinematic pairs can be classified as : (a) Lower pair, (b) Higher pair, and (c) Wrapping pair. a) Lower Pair:- A Pair of Links Having Surface or Area contact between the members is known as Lower Pair. Examples are motion of slider in the cylinder, motion between crank pin and connecting rod at big end, Nut Turning on a screw , Shaft Rotating in a bearing universal Joint etc. Types of Lower Pairs There are six types of lower pairs as given below : (a) Revolute or Turning Pair (Hinged Joint) (b) Prismatic of Sliding Pair (c) Screw Pair (d) Cylindrical Pair (e) Spherical Pair (f) Planar Pair Revolute or Turning Pair (Hinged Joint) A revolute pair is shown in Figure. It is seen that this pair allows only one relative rotation between elements 1 and 2, which can be expressed by a single coordinate ‘Ɵ’. Thus, a revolute pair has a single degree of freedom. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 7
- 8. THEORY OF MACHINES By-ranjeetnitj@gmail.com Figure : Revolute or Turning Pair Prismatic or Sliding Pair As shown in Figure, a prismatic pair allows only a relative translation between elements 1 and 2, which can be expressed by a single coordinate ‘s’, and it has one degree of freedom. Figure : Prismatic or Sliding Pair Screw Pair As shown in Figure, a screw pair allows rotation as well as translation but these two movements are related to each other. Therefore, screw pair has one degree of freedom because the relative movement between 1 and 2 can be expressed by a single coordinate Ɵ or s. These two coordinates are related by the following relation : Ɵ/2π = s/L where, L is lead of the screw. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 8
- 9. THEORY OF MACHINES By-ranjeetnitj@gmail.com Figure : Screw Pair Cylindrical Pair As shown in Figure, a cylindrical pair allows both rotation and translation Parallel to the axis of rotation between elements 1 and 2. These relative Movements can be expressed by two independent coordinates Ɵ or s because they are not related with each other. Degrees of freedom in this case are equal to two. Figure: Cylindrical Pair Spherical Pair A ball and socket joint, as shown in Figure, forms a spherical pair. Any rotation of element 2 relative to 1 can be resolved in the three components. Therefore, the complete description of motion requires three independent coordinates. Two of these coordinates α and β are required to specify the position of axis OA and the third coordinate Ɵ describes the rotation about the axis of OA. This pair has three degrees of freedom. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 9
- 10. THEORY OF MACHINES By-ranjeetnitj@gmail.com Figure : Spherical Pair Planar Pair A planar pair is shown in Figure. The relative motion between 1 and 2 can be described by x and y coordinates in x-y plane. The x and y coordinates describe relative translation and Ɵ describes relative rotation about z-axis. This pair has three degrees of freedom. Figure : Planar Pair b)Higher Pair:A higher pair is a kinematic pair in which connection between two elements is only a point or line contact. The cam and follower arrangement shown in Figure is an example of this pair. The contact between cam and flat faced follower is through a line. Other examples are ball bearings, roller bearings, gears, etc. A cylinder rolling on a flat surface has a line contact while a spherical ball moving on a flat surface has a point contact. f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 10
- 11. THEORY OF MACHINES By-ranjeetnitj@gmail.com Figure : Higher Pair c) Wrapping Pair Wrapping pairs comprise belts, chains and such other devices. Belt comes from one side of the pulley and moves over to other side through another pulley as shown in Figure Figure : Wrapping Pair Kinematic Chain When the kinematic pairs are coupled in such a way that the last link is joined to the first link to transmit definite motion (i.e. completely or successfully constrained motion), it is called a kinematic chain. In other words, a kinematic chain may be defined as a combination of kinematic pairs, joined in such a way that each link forms a part of two pairs and the relative motion between the links or elements is completely or successfully constrained. For example, reciprocating f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 11
- 12. THEORY OF MACHINES By-ranjeetnitj@gmail.com engine mechanism is a planner mechanism in which link 1 is fixed, link 2 rotates and link 4 reciprocates. In internal combustion engines, it converts reciprocating motion of piston into rotating motion of crank. This mechanism is also used in reciprocating compressors in which it converts rotating motion of crank into reciprocating motion of piston f For More like us on FB - https://www.facebook.com/IesiasgateQuestionsForMechanicalEngineering Page 12