Architecture ordinateur-echange-de-donnees
•
6 recomendaciones•4,590 vistas

objectif général : comprendre comment l'ordinateur communique avec son environnement objectifs spécifiques : - connaître le rôle et la composition de l'interface d'entrée et sortie - comprendre la scrutation ou interrogation - comprendre les requêtes d'interruption - comprendre l'accès direct à la mémoire ou DMA - connaître le fonctionnement des bus - connaître les types de liaison

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Architecture ordinateur-echange-de-donnees
Similar a Architecture ordinateur-echange-de-donnees (20)
Más de Abdoulaye Dieng
Más de Abdoulaye Dieng (20)
Architecture ordinateur-echange-de-donnees
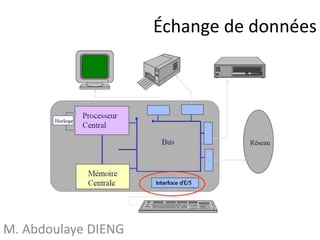
- 1. Échange de données M. Abdoulaye DIENG
- 2. Sommaire 1. Unité centrale et périphériques 2. Interface d’entrée/sortie 3. Modes d’échange de données 4. Bus 5. Types de liaison
- 3. Unité centrale et périphériques sommaire 1. Unité centrale et périphériques a) Schéma b) Communication 2. Interface d’entrée/sortie 3. Modes d’échange de données 4. Bus 5. Types de liaison
- 4. Unité centrale et périphériques schéma
- 5. Unité centrale et périphériques communication • Fonctionnement d’un système à microprocesseurs (µP) : 1) acquérir des données fournies par l’environnement 2) traiter les données 3) restituer les résultats à l’environnement • Pb : Les périphériques sont très lents p/r au µP et à la MC • Sol : une ou +sieurs interfaces d’entrées/sorties permettant d’assurer la communication entre le µP et les périphériques.
- 6. Interface d’entrée/sortie sommaire 1. Unité centrale et périphériques 2. Interface d’entrée/sortie a) Rôle b) Composition 3. Modes d’échange de données 4. Bus 5. Types de liaison
- 7. Interface d’entrée/sortie rôle • Connecter le périphérique au bus de données • Piloter l’opération d’entrée ou de sortie entre le µP et un périphérique • Formater les données et les mémoriser temporairement pour adapter leur format et la vitesse de leur transfert
- 8. Interface d’entrée/sortie composition • Un registre de commande dans lequel le µP décrit le travail à effectuer (sens de transfert, mode de transfert, …). • Un ou plusieurs registres de données (RD) qui contiennent les mots à échanger entre le périphérique et la mémoire centrale • Un registre d’état (RE) qui indique si l’interface d’E/S est prête pour recevoir une donnée, si l’échange s’est bien déroulé, … q
- 9. Modes d’échange de données sommaire 1. Unité centrale et périphériques 2. Interface d’entrée/sortie 3. Modes d’échange de données a) Scrutation b) Interruption c) Échange direct avec la mémoire 4. Bus 5. Types de liaison
- 10. Modes d’échange de données pilote d’entrée/sortie • Pilote d’E/S = programme souvent intégré au système d’exploitation, chargé de gérer l’interface d’E/S. • Chaque interface d’E/S a son propre pilote (driver). • Un programme utilisateur fait appel au pilote pour utiliser un périphérique. • Les opérations réalisées par le pilote dépendent du mode d’échange utilisé (scrutation, IRQ ou DMA)
- 11. Modes d’échange de données scrutation : principe • Pb : une interface d’E/S ne peut pas « dire » au µP qu’elle est prête pour un transfert. • Sol : Le µP scrute régulièrement l’état de l‘interface d’E/S • Scrutation : le µP lit régulièrement le registre d’état RE de l‘interface d’E/S pour éventuellement effectuer un transfert entre la mémoire centrale et le RD de l’interface d’E/S. • Algo du fonctionnement du pilote d’E/S (cas d’un seul RD ) : Tant que (il y a une donnée à transférer) Tant que (interface d’E/S non prête) attendre Fin tant que transférer la donnée dans RD fin tant que Boucle de scrutation du RE
- 12. Modes d’échange de données scrutation : schéma d’une impression de 2 caractères 1) 2) 3) 4) 5) 6)
- 13. Modes d’échange de données scrutation : commentaires sur l’impression de 2 caractères 1) Le µP lit, à partir du programme utilisateur, l’instruction imprimer(buf, 2 octets) 2) Le pilote d’E/S vérifie que l’interface d’E/S est prête à recevoir un caractère et lui envoie le 1er caractère. 3) L’interface d’E/S envoie le caractère reçu à l’imprimante au moment où le µP effectue sa boucle de scrutation 4) Le µP continue sa boucle de scrutation jusqu’à ce que l’interface d’E/S soit à nouveau prête pour que le pilote d’E/S puisse envoyer le 2nd caractère. 5) L’interface d’E/S envoie le caractère reçu à l’imprimante au moment où le µP refait sa boucle de scrutation 6) Le µP continue l’exécution du programme utilisateur
- 14. Modes d’échange de données scrutation : avantage & inconvénients • Avantage : – Simplicité • Inconvénients : – Le µP se retrouve souvent en phase d’attente – certaines requêtes d’échange non traitées immédiatement car le µP ne se trouve pas encore dans la boucle de scrutation. – mode d’échange très lent.
- 15. Modes d’échange de données interruption : principe • Pb : inconvénients de la scrutation • Sol : permettre à l’interface d’E/S de signaler son état • Requête d’interruption = signal asynchrone pouvant être émis par tout dispositif externe (comme l’interface d’E/S) au µP. • Un µP possède, en général, une seule ligne IRQ (Interrupt Request) partagée par tous les périphériques. • Avant chaque instruction, le µP examine s'il y a eu une IRQ. • S’il y a IRQ, le µP : – interrompt le programme en cours ; – sauvegarde son contexte (compteur ordinal, accumulateurs, registre d’état, …) dans un registre particulier appelé pile ; – exécute le programme associé à l'interruption (routine d’IRQ) – revient au programme interrompu.
- 16. Modes d’échange de données interruption : fonctionnement du pilote d’E/S Algorithme du fonctionnement d’un pilote d’E/S avec un seul registre de donnée (RD) : Si (l’interface d’E/S envoie une interruption) Si (il y a une donnée à transférer) transférer la donnée dans RD finSi finSi
- 17. Modes d’échange de données interruption : schéma d’une impression de 2 caractères 1) 2) 3) 4) 5) 6) 7) 8)
- 18. Modes d’échange de données interruption : commentaires sur l’impression de 2 caractères 1) Le µP lit, à partir du programme utilisateur, l’instruction imprimer(buf, 2 octets) 2) Le pilote d’E/S vérifie que l’interface d’E/S est prête à recevoir un caractère et lui envoie le 1er caractère. 3) L’interface d’E/S envoie le caractère reçu à l’imprimante 4) Dès que l’interface d’E/S est à nouveau prête, elle envoie une requête d’interruption au µP 5) Le pilote d’E/S envoie le 2nd caractère. 6) L’interface d’E/S envoie le caractère reçu à l’imprimante 7) Dès que l’interface d’E/S est à nouveau prête, elle envoie une interruption au µP 8) Le µP continue l’exécution du programme utilisateur
- 19. Modes d’échange de données interruption : priorité Si +sieurs interruptions se présentent en même temps, le µP traite d’abord celle avec la priorité la plus élevée. Recevoir des courriels Ouvrir un courriel Imprimer un courriel
- 20. Modes d’échange de données interruption : avantage & inconvénient • Avantage : – Le programme principal n’est interrompu que pendant le temps du transfert • Inconvénients : 1) Besoin de plus de matériel : l’interface doit savoir générer une interruption, le µP doit savoir la détecter, ... 2) Le transfert des données entre l’interface d’E/S et la mémoire centrale reste à la charge du µP qui ne peut rien faire d’autre pendant ce temps
- 21. Modes d’échange de données accès direct à la mémoire (DMA) : principe • Pb : 2ème inconvénient de l’interruption • Sol : décharger le µP du transfert de données • Un circuit appelé contrôleur de DMA (Direct Memory Access) prend en charge entièrement le transfert des données. • Le µP, par le biais du pilote d’E/S, doit tout de même initialiser l’échange en donnant au contrôleur DMA : – l’identification du périphérique concerné – le sens du transfert – l’adresse du premier mot concerné par le transfert – le nombre de mots à transférer
- 22. Modes d’échange de données DMA : principe (suite et fin) • Un contrôleur de DMA est doté d’un registre d’adresse (RA), d’un registre de donnée (RD), d’un compteur et d’un dispositif de commande. • Pour chaque mot à échanger, le contrôleur DMA : – demande au µP le contrôle du bus de données ; – effectue le transfert entre son RD et le mot mémoire dont l'adresse est contenue dans son RA – libère le bus de données – Incrémente l’adresse de son RA – décrémente son compteur • Lorsque le compteur atteint zéro, le dispositif de commande informe le µP de la fin du transfert par une IRQ.
- 23. Modes d’échange de données DMA : schéma d’une impression de 2 caractères 1) 2) 3) 4) 5) 6) 7)
- 24. Modes d’échange de données DMA : commentaires sur l’impression de 2 caractères 1) Le µP lit, à partir du programme utilisateur, l’instruction imprimer(buf, 2 octets) 2) Le pilote d’E/S initialise le transfert en mode DMA et lance le contrôleur DMA 3) Le contrôleur DMA se charge entièrement du transfert des deux caractères à l’interface d’E/S 4) L’interface d’E/S envoie successivement les caractères reçus à l’imprimante 5) Dès que l’interface d’E/S a fini d’envoyer le 2nd caractère à l’imprimante, le contrôleur DMA informe le µP de la fin du transfert par une IRQ 6) Le µP traite l’IRQ de fin 7) Le µP continue l’exécution du programme utilisateur
- 25. Modes d’échange de données DMA : avantage & inconvénient • Avantage – Pendant la durée du transfert, le µP est libre d'effectuer un autre traitement • Inconvénient – le µP n’a plus accès à la mémoire pendant la durée du transfert
- 26. Bus sommaire 1. Unité centrale et périphériques 2. Interface d’entrée/sortie 3. Modes d’échange de données 4. Bus a) Présentation b) Composition c) Caractéristiques d) Arbitrage de l’accès 5. Types de liaison
- 27. Bus problématique C 1 C 8 C 3C 2 C 5 C 6 C 7 C 4 C 1 C 6 C 8 C 2 C 4 C 5 C 7 C 3 B U S Problème Solution
- 28. Bus présentation • Pb : optimiser l’échange de données entre les composants • Sol : mutualiser les voies de communication • Bus = système de câblage permettant la circulation des données (signaux électriques) entre les composants (mémoires, µP, périphériques, etc.). • Objectif : réduire le nombre de « voies » nécessaires à la communication des différents composants, en mutualisant les voies de données.
- 29. Bus composition • Lignes de contrôle : – contrôler l'accès et l'utilisation des autres lignes (adr et données). – exemples : lecture, écriture, requête d’interruption, … • Lignes d’adresse : – désigne la source ou la destination des données – exemples : • adresse d’une donnée en mémoire • adresse associée à un périphérique • Lignes de données : – transfert de données ou d’instructions entre les éléments
- 30. Bus caractéristiques • Type de liaison : Parallèle (1bit/ligne) ou série (tous les bits sur un seul fil) • Cadencement : synchrone (horloge) ou asynchrone (bit start et bit stop) • Largeur : nombre de bits traités en même temps. • Fréquence : nombre de transmissions d'infos par seconde. • Débit = largeur x fréquence. (nbr de bits transférés par sec) NB : DDR (Double Data Rate) et QDR (Quadruple Data Rate) permettent respectivement d'envoyer 2 fois et 4 fois plus d'informations par cycle • Multiplexage : une partie des fils transportent alternativement des données ou des adresses • Arbitrage de l’accès au bus : statique ou dynamiqueApp
- 31. Bus arbitrage de l’accès • Pb : l’utilisation partagée du bus par plusieurs composants • Sol : arbitrage de l’accès • L'arbitrage de l’accès au bus garantit qu'à tout moment, il n'y a qu'un seul « maître ». • Maître : tout composant actif qui initie des requêtes. Exemples : microprocesseur, contrôleur DMA • Esclave : tout composant passif qui ne fait que répondre à des requêtes. Exemple : mémoire centrale • Le choix du maître peut se faire d’une manière statique ou d’une manière dynamique
- 32. Bus arbitrage de l’accès : choix statique • L'arbitrage statique consiste à rendre maître à tour de rôle, les candidats potentiels. • Si l'un des protagonistes ne souhaite pas effectuer de transaction, il reste maître du bus pour une transaction de type Non-Opération. • Avantage : simplicité de mise en œuvre. • Inconvénient : bande passante gaspillée par les non-opérations.
- 33. Bus arbitrage de l’accès : choix dynamique • Pb : gaspillage de la bande passante causée par les non- opérations de l’arbitrage statique • Sol : permettre l’accès au bus qu’en cas de besoin • L'arbitrage dynamique permet d'allouer le bus sur demande. • Une demande est acceptée suivant la disponibilité du bus. • Lorsqu'il y a +sieurs demandes simultanées, le choix peut être : – suivant une priorité affectée de manière unique à chaque maître potentiel (les bus d'E/S utilisent souvent ce type d'arbitrage) – d’une manière équitable : tout potentiel maître aura ses requêtes d'accès satisfaites au bout d'un temps fini – en combinant les deux premières politiques : un choix équitable départage deux demandes de même priorité.
- 34. Types de liaison sommaire 1. Unité centrale et périphériques 2. Interface d’entrée/sortie 3. Modes d’échange de données 4. Bus 5. Types de liaison a) Liaison parallèle b) Liaison série
- 35. Types de liaison présentation • Les systèmes à microprocesseur utilisent deux types de liaison différentes pour se connecter à des périphériques : – liaison parallèle : les bits d’un mot sont transmis simultanément et par différents fils. – liaison série : les bits d’un mot sont transmis les uns après les autres sur un seul fil. • Le choix du mode de transmission dépend de la nature de l'information, de la qualité et des caractéristiques recherchées et du coût des solutions.
- 36. Types de liaison liaison parallèle • Tous les bits d’un mot sont transmis simultanément et par différents fils. • Avantage : débit relativement élevé • Inconvénient : pas adaptée aux gdes distances de transmission – Coût et encombrement (nombre important de lignes) – Fiabilité (interférence électromagnétique) • La transmission est cadencée par une horloge (fil « clock ») • Exemples sur PC : PATA, PCI, AGP.
- 37. Types de liaison liaison série • Les bits d’un mot sont transmis les uns après les autres sur un seul fil. • Avantage : – Adaptée aux grandes distances de transmission – Économie (moins de fils) • Inconvénient : débit relativement faible (transformer la donnée parallèle en donnée série à l’émission et l’inverse à la réception) • Exemples sur PC : USB, SATA, Firewire, PCI-Express.
- 38. Types de liaison liaison série : synchronisation • Pb : le récepteur ne reconnaît pas les séquences de bits « utiles » • Solution 1 : transmission synchrone – Présence d’un fil (« clock ») pour la synchronisation des horloges respectives des systèmes qui échangent. – Chaque composant sait le type d'info (adresse, contrôle, donnée) qui passe à tel cycle d'horloge dans une transaction – Réservée pour le distances < 50 cm (dispersion du signal d'horloge sinon) • Solution 2 : transmission asynchrone – Les données utiles sont encadrées par les bits start et stop. – Permet de connecter des éléments fonctionnant à des vitesses différentes – Permet de longues distances
- 39. Types de liaison liaison série asynchrone • Transmission effectuée au rythme de la présence des données. • Les données utiles sont encadrées par les signaux start et stop. • Paramètres du protocole de transmission : – Nombre de bits de données : 7 bits ( code ASCII ) ou 8 bits – Vitesse de transmission : de 110 bit/s à 128 000 bit/s – Parité (paire ou impaire) : parité du nombre total de bits à 1 transmis (bit de parité inclus) pour contrôler les erreurs. – Nombre de bit de stop : après la transmission, la ligne est positionnée à un niveau 1 avec un certain nombre de bits afin de spécifier la fin du transfert. • La ligne au repos est à l’état 1; le passage à l’état bas (bit de start) de la ligne va indiquer qu’un transfert va commencer
- 40. Types de liaison liaison série asynchrone : schéma d’une transmission Transmission du mot 0010110 avec une parité impaire et 1 bit de Stop
- 41. Types de liaison liaison série asynchrone : déroulement d’une transmission 1) Etat d'attente (niveau logique 1) 2) Envoi d'un bit de départ (niveau logique 0) 3) Envoi des bits de données, on commence par le bit de poids faible, on termine par le bit de poids fort 4) Envoi d'un bit de parité 5) Envoi d'un ou de deux bits de stop (niveau 1) indiquant la fin d'émission du caractère. 6) Retour à l’état d'attente (niveau 1), le cycle peut recommencer avec l'envoi d'un nouveau caractère. App
Notas del editor
- synchrone (émetteur et récepteur travaillent en mm temps) ou asynchrone (données sont balisées par un bit de start et un bit de stop)
- synchrone (émetteur et récepteur travaillent en mm temps) ou asynchrone (données sont balisées par un bit de start et un bit de stop)
- synchrone (émetteur et récepteur travaillent en mm temps) ou asynchrone (données sont balisées par un bit de start et un bit de stop)
- synchrone (émetteur et récepteur travaillent en mm temps) ou asynchrone (données sont balisées par un bit de start et un bit de stop)