

Recomendados
Más contenido relacionado
Destacado
Destacado (18)
Similar a Animation
Similar a Animation (10)
Último
Último (20)
Animation
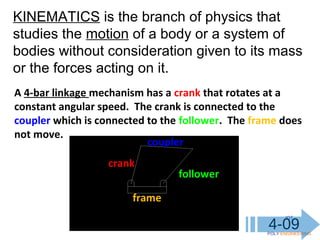
- 1. IOT POLY ENGINEERING 4-09 A 4-bar linkage mechanism has a crank that rotates at a constant angular speed. The crank is connected to the coupler which is connected to the follower. The frame does not move. crank coupler follower frame KINEMATICS is the branch of physics that studies the motion of a body or a system of bodies without consideration given to its mass or the forces acting on it.
- 2. IOT POLY ENGINEERING 4-09 A Grashof linkage is a planar four-bar linkage with S + L < P + Q where S = length of the shortest link L = length of longest link P and Q are the lengths of the two remaining links. 1. Crank-Rocker : a Grashof linkage where the shortest link is the input link (crank). 2. Double-Rocker: a Grashof linkage where the shortest link is the floating link (coupler). 3. Rocker-Crank : a Grashof linkage where the shortest link is the output link (follower). 4. Crank-Crank : a Grashof linkage where the shortest link is the ground link (frame).
- 3. IOT POLY ENGINEERING 4-09 1. Crank-Rocker : a Grashof linkage where the shortest link is the input link (crank).
- 4. IOT POLY ENGINEERING 4-09 2. Double-Rocker: a Grashof linkage where the shortest link is the floating link (coupler).
- 5. IOT POLY ENGINEERING 4-09 4. Crank-Crank : a Grashof linkage where the shortest link is the ground link (frame).
- 6. IOT POLY ENGINEERING 4-09 A pantograph is a mechanism that is used to create a drawing that is larger or smaller than an original drawing. The pantograph simulation below creates a drawing that is larger than the original drawing.
- 7. IOT POLY ENGINEERING 4-09 A parallel bar mechanism is a mechanism that retains parallelism in its members.
- 8. IOT POLY ENGINEERING 4-09 A straight line mechanism is a mechanism that is used to create straight lines. The examples below are Peaucellier mechanisms.
- 9. IOT POLY ENGINEERING 4-09 Two more examples of a straight line mechanism are shown below. These are the Tchebicheff mechanism.
- 10. IOT POLY ENGINEERING 4-09 Example of a nearly straight line mechanism is shown below. This is the Watt mechanism, invented by James Watt of steam engine fame. If you look closely, you will see that the path deviates from a straight line at the top and the bottom of motion.
- 11. IOT POLY ENGINEERING 4-09 This is a SCOTCH YOKE. As the yellow knob rotates, it causes the light gray yoke to move side to side. Thus, rotational motion has been converted to linear motion.
- 12. IOT POLY ENGINEERING 4-09 This is a GENEVA MECHANISM. As the small black knob rotates at a constant rate, it causes the dark gray mechanism to rotate one-sixth of a turn and stop, rotate one-sixth of a turn and stop, etc. The Geneva mechanism on the right side causes one-fourth of a turn movements. Rotational motion has been converted to sporadic rotational motion.