Elevate Developer Efficiency & build GenAI Application with Amazon Q
USA Report Houston
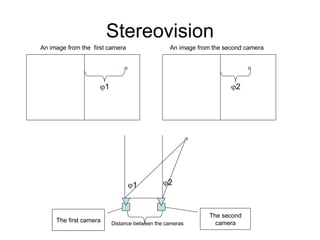
1. Stereovision 1 2 An image from the first camera An image from the second camera Distance between the cameras The first camera The second camera 1 2
2. Suggested Method: Source images An image from the first camera An image from the second camera An image from the third camera
3. Suggested Method: processing images with an edge detector (SOBEL) The image from the first camera The image from the second camera The image from the third camera
4. Suggested Method: Image comparison An image from the first camera An image from the second camera An image from the third camera
8. Solving the Problem of the objects’ orientation with the suggested method The difference of the object’s orientation is 70 degrees The Original Images
9. Solving the Problem of the objects’ orientation with the suggested method The Original Images processed with an edge detector The difference of the object’s orientation is 70 degrees
10. Solving the Problem of the objects’ orientation with the suggested method The Reconstructed Scenes The First Scene (reconstructed) The Second Scene (reconstructed)
11. Solving the Problem of the objects’ orientation with the suggested method The object from the first scene The object from the second scene
12. Solving the Problem of the objects’ orientation with the suggested method The object from the first scene The object from the second scene
13. Recognition Comparator 3D scene Target object from a Data Base The Object’s Position and Orientation in the Scene
14. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
15. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
16. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
17. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
18. Recognition Virtual Target Object Scene The Object in the Scene Using a virtual object as a target object
22. The Example Of Using The Suggested Method: The Identification Of People Receiving the 3d mask from the real image of a human begin Original Image with the projections of the reconstructed points 3D mask of the real image
23. The Example Of Using The Suggested Method: The Identification Of People Receiving the 3d mask from the real image of a human begin Original Image with the projections of the reconstructed points 3D mask of the real image