
Recomendados
Más contenido relacionado
Más de Luis Zurita
Más de Luis Zurita (20)
Último
Último (20)
Rx Tx Microii
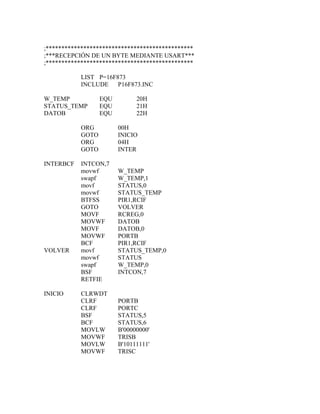
- 1. ;*********************************************** ;***RECEPCIÓN DE UN BYTE MEDIANTE USART*** ;*********************************************** LIST P=16F873 INCLUDE P16F873.INC W_TEMP EQU 20H STATUS_TEMP EQU 21H DATOB EQU 22H ORG 00H GOTO INICIO ORG 04H GOTO INTER INTERBCF INTCON,7 movwf W_TEMP swapf W_TEMP,1 movf STATUS,0 movwf STATUS_TEMP BTFSS PIR1,RCIF GOTO VOLVER MOVF RCREG,0 MOVWF DATOB MOVF DATOB,0 MOVWF PORTB BCF PIR1,RCIF VOLVER movf STATUS_TEMP,0 movwf STATUS swapf W_TEMP,0 BSF INTCON,7 RETFIE INICIO CLRWDT CLRF PORTB CLRF PORTC BSF STATUS,5 BCF STATUS,6 MOVLW B'00000000' MOVWF TRISB MOVLW B'10111111' MOVWF TRISC
- 2. MOVLW B'00100100' MOVWF TXSTA MOVLW D'25' MOVWF SPBRG BSF PIE1,RCIE BCF STATUS,5 BCF STATUS,6 MOVLW B'10010000' MOVWF RCSTA MOVLW B'11000000' MOVWF INTCON BUCLE CLRWDT GOTO BUCLE END ;******************************************* ;***TRANSMISIÓN DE UN BYTE MEDIANTE USART*** ;******************************************* LIST P=16F873 INCLUDE P16F873.INC DATOB EQU 20H ORG 00H GOTO INICIO ORG 04H RETFIE INICIO BSF STATUS,6 BSF STATUS,5 MOVLW B'11111111' MOVWF TRISB BCF STATUS,6 MOVLW B'10000000' MOVWF TRISC PASO1 BCF STATUS,6 BCF STATUS,5
- 3. MOVF PORTB,0 MOVWF DATOB CALL ENVIAR_DATO GOTO PASO1 ENVIAR_DATO BCF STATUS,6 BSF STATUS,5 MOVLW B'00100110' MOVWF TXSTA MOVLW D'25' MOVWF SPBRG BCF STATUS,5 ;Banco0 BSF RCSTA,7 ;SPEN=1 ON USART MOVF DATOB,0 MOVWF TXREG ESPERA BTFSS PIR1,4 GOTO ESPERA RETURN END