EGU General Assembly 2013: The new g.infer add-on for GRASS GIS
•Descargar como PPT, PDF•
0 recomendaciones•1,189 vistas

Recomendados

Recomendados
Más contenido relacionado
Destacado
Destacado (20)
Similar a EGU General Assembly 2013: The new g.infer add-on for GRASS GIS
Similar a EGU General Assembly 2013: The new g.infer add-on for GRASS GIS (20)
Más de Peter Löwe
Más de Peter Löwe (17)
Último
Último (20)
EGU General Assembly 2013: The new g.infer add-on for GRASS GIS
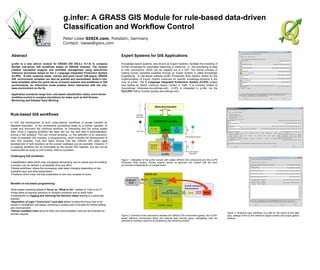
- 1. g.infer: A GRASS GIS Module for rule-based data-driven Classification and Workflow Control Peter Löwe GISIX.com, Potsdam, Germany Contact: loewe@gisix.com Abstract g.infer is a new add-on module for GRASS GIS (V6.4.x /V.7.0) to compose flexible rule-driven GIS workflows based on GRASS modules. The module enables rule-based analysis and workflow management using data-driven inference processes based on the C Language Integrated Production System (CLIPS). G.infer supports raster, volume and point vector GIS-layers. GRASS GIS environment variables can also be queried and manipulated. Built-in rule- base templates allow the quick set-up of expert systems and workflows in GIS environments. An interactive mode enables direct interaction with the rule- base environment on the fly. Application scenarios range from rule-based classification tasks, event-driven workflow-control to complex simulations for tasks such as Soil Erosion Monitoring and Disaster Early Warning Expert Systems for GIS Applications Knowledge-based systems, also known as Expert Systems, facilitate the encoding of human knowledge for automated reasoning or inference, i.e., the processing of data to infer conclusions, which can be mapped out in a GIS. The overall process of making human expertise available through an Expert System is called Knowledge Engineering. A rule-based software toolkit (Production Rule System toolkit) for the implementation of Expert System instances for specific knowledge-domains is the core of g.infer: The C Language Integrated Production System (CLIPS) project was started by NASA (Johnson Space Center) in 1985. It is currently hosted at Sourceforge (clipsrules.sourceforge.net/). CLIPS is integrated in g.infer via the PyCLIPS Python module (pyclips.sourceforge.net/). Rule-based GIS workflows In GIS, the development of such „map-making“ workflows is usually handled by stepwise execution of the consecutive processing steps by a human operator, to create and document the unfolding workflow, by interacting with the actual spatial data. Once a mapping workflow has been laid out, the next step is automatization, turning it into software. This can involve scripting, i.e. the definition of an execution- chain of available GIS modules, or programming, which includes the development of new GIS modules. Free and Open Source GIS like GRASS GIS allow rapid development of both solutions as the overall codebase can be exploited. However, if a mapping workflow can be formulated by the human GIS operator, but can not be implemented as script or GIS module, there’s a problem. Challenging GIS workflows: •Classification tasks which may not appear demanding, but no robust way for building a solution can be defined in acceptable time and effort. •Simple workflows, where the processing rules keep changing depending on the available input and other parameters. •Problems which have not fully understood or are very complex to solve. Benefits of rule-based programming: •Rule-based modeling allows to focus on “What to Do” instead of “How to do It”. •Rules allow to express solutions to complex problems and to verify them consequently by logging and retracing the decision steps leading to a particular solution. •Separation of logic (“know-how”) and data allows to keep the know-how to be stored in centralized rule-bases, providing a central point of access for further editing and improvement. •Human-readable rules serve as their own documentation and can be reviewed by domain experts. Figure 1: Interaction of the g.infer module with related GRASS GIS components and the CLIPS Production Rule System. Human experts (shown as figurines) can interact with this work environment independently on multiple levels. Figure 2: Overview of the interactions between the GRASS GIS environment (green), the CLIPS- based inference environment (blue) and external data sources (grey), highlighting (red) the potential for workflow control to be excerted by the inference process. Figure 3: Graphical User Interfaces of g.infer for the import of GIS data (top), settings of the CLIPS inference engine (center) and output options (bottom).