El metodo doolittle
•
11 recomendaciones•26,355 vistas

El documento describe métodos para resolver sistemas de ecuaciones lineales, incluyendo el método de Doolittle. El método de Doolittle descompone la matriz del sistema en matrices triangulares inferior y superior. El documento también explica cómo implementar el método de Doolittle en software como Matlab para resolver sistemas numéricamente.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a El metodo doolittle
Similar a El metodo doolittle (20)
Último
Último (20)
El metodo doolittle
- 1. Propedéutico de Matemáticas DEPFIE EL MÉTODO DOOLITTLE
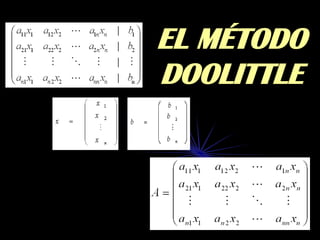
- 2. SISTEMA DE ECUACIONES LINEALES Un sistema de ecuaciones algebraicas tiene la siguiente representación general: Donde las aij son los coeficientes del sistema y las bi corresponden a las variables independientes. Para el correcto manejo de las técnicas de resolución de sistemas simultáneos de ecuaciones, estos se transforman a su forma matricial:
- 3. SISTEMA DE ECUACIONES LINEALES A esta forma se le conoce como matriz aumentada del sistema. Puede observarse que las primeras n columnas corresponden a los coeficientes aij del sistema, mientras que la columna n + 1, corresponde a las variables independientes. Ahora bien, si se considera que A es una matriz cuadrada de n x n: Que contiene a los coeficientes del sistema, x es un vector columna de n x 1:
- 4. SISTEMA DE ECUACIONES LINEALES Que representa al conjunto de variables independientes, el sistema tiene la siguiente representación algebraica: Que contiene al conjunto de incógnitas y b un vector columna de n x 1:
- 6. EL MÉTODO DOOLITTLE Otro método para resolver sistemas lineales de ecuaciones algebraicas es el método de descomposición. En la descomposición o factorización LU, la matriz [L] tiene números 1 en su diagonal principal. Al método de Crout también se le denomina formalmente MÉTODO DE DOOLITTLE.
- 7. EL MÉTODO DOOLITTLE Una formulación alternativa con números 1 sobre la diagonal principal se conoce como método de descomposición de Crout. Este método genera [U] y [L] recorriendo las columnas y las filas de la matriz de forma alternada y se expresa mediante las siguientes fórmulas:
- 9. EL MÉTODO DOOLITTLE Este método presenta ventajas para su implementación computacional sobre el método LU. EJEMPLO: Resolver el siguiente sistema de ecuaciones mediante el método de Crout:
- 13. APLICACIÓN EN SOFTWARE MATEMÁTICO En la práctica de la ingeniería y ciencias es frecuente tener la necesidad de resolver un sistema de ecuaciones lineales. Estos sistemas aparecen en muy diversos problemas, ya sea como la solución completa de un problema ó al menos como parte de ella. Dada esta necesidad frecuente, se requiere resolverlos en forma eficiente. Los métodos numéricos que resuelven los sistemas se pueden clasificar en directos e indirectos.
- 14. APLICACIÓN EN SOFTWARE MATEMÁTICO Los métodos directos son aquellos que determinan la solución en un número determinado de pasos. Los métodos iterativos son aquellos que obtienen la solución aproximándose a ella en un número finito, pero no definido de pasos. La siguiente entrega pretende encontrar la solución de un sistema de ecuaciones lineales por los métodos anteriormente mencionados.
- 15. APLICACIÓN EN SOFTWARE MATEMÁTICO Como los algoritmos de los métodos ya están disponibles en la mayoría de los libros de texto sobre la materia, se explicara en la medida de lo posible, detalles de implementación (personales) de los métodos directos (que son mas difíciles de programar). El lenguaje de programación idóneo para tal fin será matlab 6.0.
- 16. APLICACIÓN EN SOFTWARE MATEMÁTICO DOOLITTLE (Captura de los datos de entrada) ¿Que es lo que necesita un método directo para poder empezar? Resulta lógico pensar que necesita A y b (Ax=b), pero si esto se hace pidiéndole al usuario que digite A y luego b, se corre el riesgo que digite mal los datos, además resulta muy cansado hacerlo. Podría además digitar un tamaño de matriz que no corresponde a la matriz. Para aminorar un poco el riesgo, se le pedirá al usuario que ingrese la matriz aumentada del sistema, de la cual se sacará la información necesaria para que el método funcione. Como el tamaño de A es n*n, el tamaño de la matriz aumentada es n*n+1, puesto que se incluye a "b"(una columna mas).
- 17. APLICACIÓN EN SOFTWARE MATEMÁTICO El algoritmo de captura quedaría como: 1) Lea matriz 2) Tam=tamaño(matriz) 3) Para i=1, n haga b(i)=matriz(i,n+1) (determinar "b") Para j=1, n haga A(i,j)=matriz(i,j) (determinar "A") Finpara Finpara 4- b1=transpuesta(b) ("b" es un vector columna)
- 18. APLICACIÓN EN SOFTWARE MATEMÁTICO DOOLITTLE (Implementación de los procedimientos progresivos y regresivos que llevan a la solución.) Se utilizará un sistema de 3*3 y 4*4 para ver el comportamiento de "c" en L*c=b, y de "x" en Ux=c. L*c=b c(1)=b(1) c(2)=b(2)-[l(2,1)*c(1)] c(3)=b(3)-[l(3,1)*c(1)+l(3,2)*c(2)]
- 19. APLICACIÓN EN SOFTWARE MATEMÁTICO c(1)=b(1) c(2)=b(2)-[l(2,1)*c(1)] c(3)=b(3)-[l(3,1)*c(1)+l(3,2)*c(2)] c(4)=b(4)-[l(4,1)*c(1)+l(4,2)*c(2)+l(4,3)*c(3)] Es fácil observar, que lo que se esta efectuando entre corchetes ([]), es una sumatoria. También se observa que en L(i,j) , i<>j y i>j Además, de c(2) a c(n) se tiene que para L(i,j), i=2,n y j=1,n-1 Entonces el esquema para c quedaria como: c(1)=b(1) c(i)=b(i)-Sumatoria(L(i,j)*c(i)), i<>j y i>j para todo L(i,j) con i=2,n y j=1,n-1
- 20. CONCLUSIONES
- 21. CONCLUSIONES VENTAJAS: Probablemente más eficientes que los directos para sistemas de orden muy alto. Más simples de programar. Puede aprovecharse una aproximación a la solución, si tal aproximación existe. Se obtienen fácilmente aproximando burdas de la solución. Son menos sensibles a los errores de redondeo (valioso en sistemas mal condicionados). Se requiere menos memoria de máquina. Generalmente, las necesidades de memoria son proporcionales al orden de la matriz.
- 22. CONCLUSIONES DESVENTAJAS: Si se tienen varios sistemas que comparten la matriz coeficiente, esto no representará ahorro de cálculos ni tiempo de máquina, ya que por cada vector a la derecha de A tendrá que aplicarse el método seleccionado. Aún cuando la convergencia este asegurada, puede ser lenta y,por lo tanto, los cálculos requeridos para obtener una solución particular No son predecibles. El tiempo de máquina y la exactitud del resultado dependen del Criterio de convergencia. Si la convergencia es lenta, los resultados deben interpretarse con cautela. No se tiene ventaja particular alguna (tiempo de máquina por iteración) si la matriz coeficiente es simétrica. No se obtiene la inversa de A ni el determinante de A.
- 23. MUCHAS GRACIAS docente - matemática TAPIA RUIZ RONALD