
Recomendados
Más contenido relacionado
Último
Último (20)
Destacado
Destacado (20)
robot futbolista
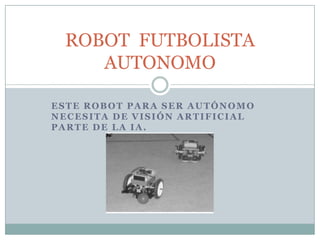
- 1. ESTE ROBOT PARA SER AUTÓNOMO NECESITA DE VISIÓN ARTIFICIAL PARTE DE LA IA. ROBOT FUTBOLISTA AUTONOMO
- 2. El objetivo del proyecto en “Robótica Inteligente”, es promover el estudio de áreas de Inteligencia Artificial a través del fútbol con robots. En este proyecto se describe el diseño de un agente en Prolog. Agente: es todo aquello que puede percibir su entorno mediante sensores y responder o actuar en el ambiente por medio de actuadores. Agente de software (softbot) es un programa de computadora capaz de realizar acciones de forma autónoma en el ambiente en que está situado.
- 3. AGENTE EN PROLOG EL PROLOG ES UN LEGUAJE DE PROGRAMACION, QUE SERIA EL ESQUELETO DEL AGENTE. Prolog se puede utilizar para resolver, básicamente, cualquier tipo de problema. Principalmente es útil en la gestión de Juegos, en Inteligencia Artificial y Sistemas Expertos, como lenguaje especialmente pensado para construir bases de conocimientos basados en la lógica que forman parte importante de cualquier agente inteligente, en la construcción de Compiladores e Intérpretes, en el Reconocimiento del Lenguaje Natural, etc.
- 4. Diseño de un Agente en Prolog El enfoque tradicional de la construcción de agentes, está dado por la representación simbólica de su ambiente. La representación del ambiente del futbol con robots está dada por la ubicación y orientación de cada uno de los jugadores
- 5. Por ejemplo Una posible representación del ambiente a través de reglas puede ser: limites cancha(inferior(0,0), superior(90,50)). arco propio(inferior(90,20), superior(90,40)). arco contrario(inferior(0,20), superior(0,40)). pelota(posición(4,4)). arquero propio(posición(88,25),90). arquero contrario(posición(2,20),180). jugador1 propio(posición(15,10),45). jugador1 contrario(posición(3,5),315).
- 6. RAZONAR razonar( Accion) : − pelota en área− > despejar pelota( Accion); pelota dir área− > esperar en área( Accion); ir a posición base( Accion).
- 7. Plataforma real La plataforma utilizada para experimentar con robots reales. Una cámara de video captura imágenes del campo de juego, que son enviados a un servidor de video llamado doraemon. Este programa procesa la imagen extrayendo posición y el Angulo de orientación de los jugadores y la pelota del campo de juego
- 8. En la figura de muestra claramente el objetivo del proyecto