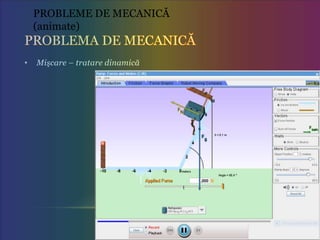
1. • Mişcare – tratare dinamică
PROBLEME DE MECANICĂ
(animate)
2. Un corp de masă m=20 kg aflat
pe suport orizontal poate fi deplasat
fie prin tracţiune F1 , fie prin
împingere F2 sub unghi
α =300 .
Să se determine care este cea
mai eficientă acţiune, pentru a se
deplasa cu aceeaşi acceleraţie.
Se cunosc:
• coeficientul de frecare la alunecare
μ = 0,2
• acceleraţia, a = 20 m/s2,
• acceleraţia gravitaţională g=10 m/s2
.
Aplicăm principiul II generalizat,
pentru că avem un număr mai mare de forţe :
R m a
Pentru cazul analizat, forţele sunt:
Continuare
f
R F G N F
Prin urmare, relaţia generalizată în acest caz
este:
f
F G N F m a
2
4. REZOLVARE
1
1 1
1
1
1
.
x
y
f
f y
F
G
ox m
I
F
N
m
a
oy
F
F g
F
1
1
1
1
1
1
. cos
sin
y
y
x
x F
m m
I
F
F g
F
F
F a
1 cos sin g
a
m
F
1
.
cos sin
g
a
m
I F
2
2 2
2
2
2
.
x
y
y
f
f
F
G
g
ox m
II oy
m
N
F
F
F
F a
2
2 1
2
1
2
. cos
sin
y
y
x
x F
m m
II
g
F
F
F
F
a
F
2 cos sin g
a
m
F
2
.
cos sin
m g
a
I F
I
2
2 1
1
cos sin
cos sin
F
F F
F
Efort mai mare la împingere decât la tragerea corpului !
4
5. • Pe un plan înclinat de unghi , un corp lăsat
liber coboară cu accelaraţia .
• Acelaşi corp fiind aruncat de jos în sus de-a lungul
planului înclinat urca cu .
Determinaţi valoarea coeficientului de frecare dintre
corp şi planul înclinat.
0
45
c
a m / s2
1
u
a , m / s2
1 5
Rezolvare
Problema 3
5
6. f
F N
G
n
G
t
G
c
a
COBORÂRE
x
y
f c
m principi
F a
N ul
G II
0
sin
cos
f c
f
n
t
t
n
G
G
ox m
oy
metoda
G
G
analitică
m
F a
F N
G
G
G
N
g
1
sin cos
c
a g
Continuare
6
7. u
a
N
G
n
G
t
G
f
F
0
v
URCARE
x
y
f u
m principi
F a
N ul
G II
1
0
sin
cos
f u
n
f
n
t
t
G
G
ox m
oy
metoda
G
G
F a
an
G
a
N
N
litică
m
G
g
G
F
2
cos sin
u
a g
Continuare
7
8. (1) (2)
şi
u
c
i
a
D
a
g
n
( cos sin )
g
( cos sin )
(sin cos )
(sin cos )
u
c
a
a
cos sin cos sin
u u c c
a a a a
cos sin
c u u c
a a a a
sin
cos
u c
c u
a a
a a
0,5
2
1
,5
1
0,5 1
0,2
2,5 5
Enunţ
1
sin cos
c
a g
2
cos sin
u
a g
8
9. PROBLEMA TENSIUNE MECANICĂ – FRECARE –plan orizontal
• În sistemul din figura de mai jos se cunosc masele m 0 , m 1 şi m 2 şi coeficientul de frecare
dintre corpuri şi suprafaţa orizontală. Să se determine acceleraţia cu care se deplasează
sistemul şi tensiunea din firul care leagă corpurile 1 şi 2.
2
N 1
N
2
Ff
2
G
1
T
1
T
1
m 2
m
1
Ff
1
G
2
T
2
T
0
G
o
m
2
T
2
T
a
a
0 o 2 0
1 2 1 f 1 1
2 1 f 2 2
Corpul de masă m :(ox) G T m a
Corpul de masă m :(ox) T T F m a
Corpul de masă m :(ox) T F m a
Împărţim sistemul pe subsisteme şi aplicăm metoda analitică.
Pe axa mişcării vom avea proiecţiile:
Rezolvare
Problema 2
9
10. REZOLVARE
0 1 2 0 1 2
Din 1 :m g m g m g a (m m m )
f 2 2 f 2 2
Ştiind că F N şi pe oy N m g F m g
1 0 2
m m m
0 1 2
1 2 2
1 0 2
2 0 1 2 2 2 0 1 2
1
0 1 2
2 2
2 0 1 2 2 0 2 1 2
0 1 2
m (m m )
Din 3 şi 4 :T m g m g
m m m
g m m g (m m ) m m g(m m m )
T
m m m
g m m g m m m m g m m g m g
m m m
0 2
1
0 1 2
m m
T 1 g
m m m
5
0 1 2
0 1 2
[m (m m )]
a g
m m m
4
Diagramă
10
11. DATELE PROBLEMEI
0
1
2
:
30 ;
0,35 ( )
0,65 ( )
A
A
Se dă
v ct
m kg coborâre
m kg urcare
:
.
.
. ?
. ?
T
B
Se cere
a reprezentare forte
b R scripete
c
d m
11
13. CONFIGURARE FORŢE LA URCARE
A2
G
T
T
T
T
x
B
G
n
G
t
G
N
f
F
v v
y REZOLVARE
13
14. 1
1
c.la urcare:
(1)
t f
A
t A f
B G T F
A T m g
G m g F
1
1 2
2
c.la coborâre:
(2)
t f
A
t f A
B G F T
A T m g
G F m g
2 1
(2) (1): f A A f
Din F m g m g F
DIAGRAMĂ coborâre
DIAGRAMĂ urcare
2 1
2 1
2 (3)
2
A A
f A A f
m m g
F m m g F
0
R=0
:
0
În ambele cazuri
B f
A T
G
T
F
N
G
14
15. : ; cos
cos (4)
f B
f B
Dar F N N m g
F m g
2 1
1
2 1
(3),(4) (1):
sin : sin
2
(5)
2 sin
A A
B A
A A
B
Introducem în
m m g
m g m g g
m m
m
15
16.
2 1 2 1
2 1 2 1
2 1 2 1
(3),(5) (4) :
cos :
2 2 sin 2
sin
cos
0,65 0,35 1 0,3
0,17
0,65 0,35 1 1,7
3
A A A A
A A A A
A A A A
Introducem în
m m g m m g
g
m m m m
tg
m m m m
16
2 1
. (5):
0,65 0,35
1,0
1
2 sin 2
2
A A
B B
d Din
m m
m m kg
17. • Un corp de masă m=150 g, cuplat cu
un resort elastic, este în repaus pe
suprafaţă orizontală. Se trage pe
verticală de capătul liber al resortului
cu viteza v=2 cm/s.
a) Cât este constanta elastică, dacă se
desprinde după t1 =5 s ?
b) Cu ce forţă apasă corpul pe suprafaţa
de sprijin după t2 =3 s ?
c) Se trage pe orizontală de resort cu
aceeaşi viteză. Care este valoarea
maximă a forţei de frecare dacă după
t = 3 s corpul ia startul ?
PROBLEMA FRECARE/ELASTICITATE
F
G
F
v
0
l
f
l
a b c
17
18. REZOLVARE
0
R=0 v=ct.
F G G
F
G
F
m g
k l m g k
l
v
dar l t
a
v
m g
k
t
3
2
150 10 10
: 15
10 5
2
N
Numeric k
m
0
unde
f
l l l
18
19. REZOLVARE
0
N
R=0 N
v=ct
F G G
F
b
F
G
F
v
0
l
2
l
N
2
N l
m k
g
2 2
l v t
2
N k v
g t
m
3 2
:
150 10 10 15 10 3
2
Numeric
N
N 0 6
, N
19
20. REZOLVARE
R=0 N+ 0
v=c
f
t
F G F
c
F
G
v
N
2
15 3 0,9
:
2 10
f
Numeric
F N
f
F
0
f f
F
F
) F
(ox F
N - -
0 N
(oy) G G
3
F k l k v t
3
f k v t
F
20
21. În sistemul prezentat
scripetele este ideal, corpurile 1
şi 2 au greutăţile G1 = 4N,
respectiv G2 = 8N, iar firul de
care sunt legate este inextensibil
şi foarte uşor. Coeficientul de
frecare la alunecare între oricare
două suprafeţe este μ = 0,25.
Calculează valoare forţei
necesare pentru a deplasa
corpul 2 cu vitează constantă.
F
2
G
2
N
1
G
1
N
T T
T
T
v
2
f
F
1
Ff
Corpul de masă 1 este deplasat sub acţiunea tensiunii şi frânat prin
interacţiune cu corpul suport conform forţei normale datorate propriei
greutăţi
1
2
Corpul de masă 2 este deplasat sub acţiunea forţei de tracţiune şi frânat
de tensiune, forţa de frecare datorată interacţiunii cu corpul superior şi
respectiv cu planul, asupra căruia acţionează cu greutatea proprie dar şi
cu greutatea corpului 1
22. 1
G
1
N
T
1
Ff
1 1
0
f f
F
T T
ox
F
1 1
1 1
f f
F G
N F
1
1 1
1
0
N N
G
y G
o
2
G
1
G
2
N
F T
2
f
F
1
Ff
1 1
2 2
0
F
f f
f f
F
o F
F
F F
T
x T
2
1 2
1
2 2
0
o N N
G G
y G
G
2 2
2 2
1
f f
N G
F F G
1 2
22
1
T G
2
1 1 G
G T
F G
1 2
3 G G
F
5
F N
Explicaţiile sunt accesabile pe buline !
Întoarcere pe săgeţile din pagina enunţului !