
Recomendados
Recomendados
Más contenido relacionado
Destacado
Destacado (8)
Similar a "Kate, a Platform for Machine Intelligence" by Wayne Imaino, IBM Research
Similar a "Kate, a Platform for Machine Intelligence" by Wayne Imaino, IBM Research (20)
Más de diannepatricia
Más de diannepatricia (20)
Último
Último (20)
"Kate, a Platform for Machine Intelligence" by Wayne Imaino, IBM Research
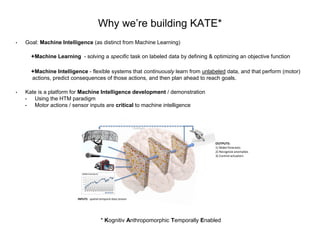
- 1. Why we’re building KATE* • Goal: Machine Intelligence (as distinct from Machine Learning) Machine Learning - solving a specific task on labeled data by defining & optimizing an objective function Machine Intelligence - flexible systems that continuously learn from unlabeled data, and that perform (motor) actions, predict consequences of those actions, and then plan ahead to reach goals. • Kate is a platform for Machine Intelligence development / demonstration • Using the HTM paradigm • Motor actions / sensor inputs are critical to machine intelligence * Kognitiv Anthropomorphic Temporally Enabled INPUTS: spatial-temporal data stream OUTPUTS: 1) Make forecasts 2) Recognize anomalies 3) Control actuators Feedback
- 2. Learning Bipedal Locomotion • Kate follows biological architecture / control structure • Central pattern generator - low level control • Assisted by cerebellum for coordination • Muscle-like actuation / feedback • Back-drivable motors • Spring extended actuators • Sensor-motor sequences should predict an expectation • Given motor effort what sensor input does HTM expect • e.g., after a step, HTM will expect foot pressure • Given sensor input what motor action should HTM initiate • e.g., if torso is pitched forward, HTM will initiate a leg swing • Temporal sequences encode context Slow walk
- 3. © 2014 IBM Corporation IBM Research | Science & Technology 3 • Spatial pooler regulates the connection of the inputs to the cell columns • Column activity determined by thresholding and inhibition • Input is represented as a sparse activity of columns • Sparse Distributed Representation or SDR • Temporal memory encodes sequences through cell activity • Predictive capability • Temporal pooler identifies sequences • Enables the hierarchy Spatial pooler Temporal memory input block diagram of 1 region Cell Columns Cell Columns Cell Columns input region 1 region 2 region 3 HTM Algorithm Temporal Pooler
- 5. Kate: Strategic Direction • Future conduit for IBM’s cloud-based cognitive services • Ground-up integration • Watson services • Speech recognition / generation • Parts of speech parsing • Key parts of Machine Intelligence based HTM • Learning required : impossible to account for all contexts • Contextual control • Learning through demonstration • SDR formation of objects / actions Kate walking in Austin Lab
- 6. • Kate is an open robotic platform for IBM’s cognitive services • IBM’s value is in the services provided • Existing Watson services • Speech recognition / generation • Parts of speech parsing • New services based on HTM • Low cost for wide deployability • Easily fabricated • 3D printed parts, commonly available parts Kate: Collaborative Platform for Machine Intelligence Early concept Student version iPad Motor controller
- 7. Kate: Bipedal Locomotion and HTM • Traditional control metrics not applicable for locomotion • Control error, speed, bandwidth • (More applicable to robot arms, where placement is important) • Traditional control - kinematic path design / following is brittle • Works well only for well-defined environments • Metric in walking is NOT FALLING • Given any environment • Online learning is vital - key demonstration of HTM • Learning / recognition accuracy • Capacity • HTM sequence memory will learn / recognize all contexts • For which Kate is exposed • HTM will recognize contexts and modify control actions • Through central pattern generator (Galil controller) • Walking is a microcosm of intelligence without HTM
- 8. © 2014 IBM Corporation IBM Research | Science & Technology 8 • Spatial pooler regulates the connection of the inputs to the cell columns • Column activity determined by thresholding and inhibition • Input is represented as a sparse activity of columns • Sparse Distributed Representation or SDR • Temporal memory encodes sequences through cell activity • Predictive capability • Temporal pooler identifies sequences • Enables the hierarchy Spatial pooler Temporal memory input block diagram of 1 region Cell Columns Cell Columns Cell Columns input region 1 region 2 region 3 Appendix: Brief Description of the HTM Algorithm Temporal Pooler
- 9. © 2014 IBM Corporation IBM Research | Science & Technology • Proximal dendrites connects inputs to cell columns • Only inputs cause cell columns or cells to be active • Distal dendrites connect cells to cells • Captures sequences • Incorporates predictive capability • Cells have 4 states • Active (from inputs) • Predictive (from other cells) HTM Terminology Active In-active Predictive Active / predictive Proximal threshold Permanence threshold Distal threshold τo τp τd
- 10. © 2014 IBM Corporation IBM Research | Science & Technology V (overlap)2 3 3 C (connectivity) HTM: Spatial Pooler Cell columns Step 1. Calculate overlap V = CI Step 2. Threshold S = V’ > τo I (input) Step 3. Enforce inhibition
- 11. © 2014 IBM Corporation IBM Research | Science & Technology P (permanence) S (column state) HTM: Spatial Pooler Cell columns 0 1 1 Step 4. Learning. Active columns only. Pi,j = Pi,j + δ Ij is true Pi,j = Pi,j - δ Ij is false Step 5. C = P >τp (all possible connections) 0 0 1 1
- 12. © 2014 IBM Corporation IBM Research | Science & Technology D (connectivity) S (column state) HTM: Temporal Memory 0 1 1 Step 1. Calculate active state 3 2 1 Step 2. Calculate distal dendrite overlap, J J = DA Step 3. Threshold to obtain dendrite state K = J > τd Step 4. Cells with ‘active’ dendrites are predictive
- 13. © 2014 IBM Corporation IBM Research | Science & Technology Q (permanence) all possible connections S (column state) HTM: Temporal Memory 0 1 1 Qi,j = Qi,j + δ Aj is true Qi,j = Qi,j - δ Aj is false Step 5. Learning. For active dendrites only. Step 6. Update connectivity D = Q >τp
- 14. References • . J. Hawkins, S. Blakeslee. On Intelligence. Henry Holt and Company, New York, 2004. •. Numenta white paper, “HIERARCHICAL TEMPORAL MEMORY including HTM Cortical Learning Algorithms