More Related Content Similar to Control system exercise (20) 1. Exercise 01 (Homework)
K 1/(S+1)
1/(S+1)
S
1/(S+1)
0.1
+
- -
+
K 1/(S+1)
S/(S+1)
0.1/(S+1)
+
- -
+
1/(S+1)
0.1/(S+1)
+
-
K(S+1)/(KS+S+1)
+
-
H=0.1
R C
E
B
K
KS+S+1
K
K(S+0.1)+(S+1)
G =
Kalarooban S | 171022R
R C
R C
C
R
C
R
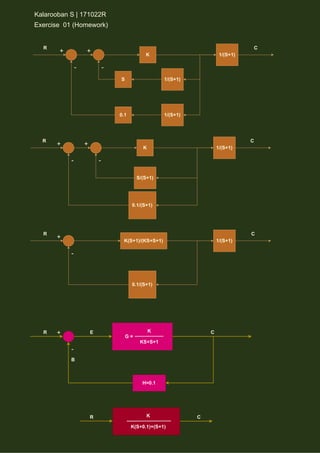
2. For the system represented by the following block diagram determine:
1. Open loop transfer function:
𝑮(𝒔). 𝑯(𝑺) =
𝟎. 𝟏𝑲
𝑲𝑺 + 𝑺 + 𝟏
2. Feed Forward Transfer function:
𝑪(𝒔)
𝑬(𝒔)
= 𝑮(𝒔) =
𝑲
𝑲𝑺 + 𝑺 + 𝟏
3. Control ratio:
𝑪(𝒔)
𝑹(𝒔)
=
𝑮(𝒔)
𝟏+𝑮(𝒔).𝑯(𝒔)
=
𝑲
𝑲(𝑺+𝟎.𝟏)+(𝑺+𝟏)
4. Feedback ratio:
𝑩(𝒔)
𝑪(𝒔)
= 𝑯(𝒔) = 𝟎. 𝟏
5. Error ratio:
𝑬(𝒔)
𝑹(𝒔)
=
𝟏
𝟏+𝑮(𝒔).𝑯(𝒔)
=
𝑺(𝑲+𝟏)+𝟏
𝑲(𝑺+𝟎.𝟏)+(𝒔+𝟏)
6. Closed loop transfer function:
𝑪(𝒔)
𝑹(𝒔)
=
𝑮(𝒔)
𝟏+𝑮(𝒔).𝑯(𝒔)
=
𝑲
𝑲(𝑺+𝟎.𝟏)+(𝑺+𝟏)
7. Characteristic equation:
𝑲(𝑺 + 𝟎. 𝟏) + (𝑺 + 𝟏) = 𝟎
8. Closed loop poles and zeros if K=100.
Zeros: Nil
Poles:
𝟏𝟎𝟎(𝑺 + 𝟎. 𝟏) + (𝑺 + 𝟏)=101S+11=0
𝑺 = −
𝟏𝟏
𝟏𝟎𝟏
jω
σ
-
𝟏𝟏
𝟏𝟎𝟏
X
S - Plane
3. Exercise 02
G1 G2 G3
H1
H2
-
+
+
+
-
+
G1 G2.G3
H1/G3
H2
-
+
+
+
-
+
G1 G2.G3/(1+G2.G3.H2)
H1/G3
-
+
+
+
G1.G2.G3/(1+G2.G3.H2)
H1/G3
-
+
+
+
R C
C
R
C
R
C
R
4. -
+
G1.G2.G3
1+G2.G3.H2 - G1.G2.H1 + G1.G2.G3
G1.G2.G3
1+G2.G3.H2 - G1.G2.H1
Excercise 03
-
+
-
+ G1
-
+ G2 G3
+
H1
H2
G4
+
-
+
-
+
G1
-
+
G2.G3
+
G2.H1/(G2.G3+G4)
H2
G4
+
R C
C
R
R(s) Y(s)
Y(s)
R(s)
7. H3 + {H1(1+G2.H2)/G2}
G1.G2/(1+G2.H2)
+
R(s) Y(s)
-
G1.G2
1+G2.H2+G1.G2.H3+G1.H1+G1.G2.H1.H2
Exercise 05
Y(s)
R(s)
G1 G2
-
+
-
+ G3 G4
-
+
H3
H2
H1
+
-
H4
R(s) Y(s)
G1 G2
-
+
-
+ G3 G4
-
+
H3/G4
H2/G4
H1
+
-
H4
R(s) Y(s)
12. Block Diagram of Armature Controlled D.C Motor
Apply K.V.L
𝑣𝑣𝑎𝑎 = 𝑅𝑅𝑎𝑎𝑖𝑖𝑎𝑎 + 𝐿𝐿
𝑑𝑑𝑖𝑖𝑎𝑎
𝑑𝑑𝑡𝑡
+ 𝑒𝑒𝑏𝑏-------------------(1)
𝑒𝑒𝑏𝑏 ∝ ∅𝜔𝜔 = 𝑘𝑘𝑏𝑏1∅𝜔𝜔 = 𝐾𝐾𝑏𝑏𝜔𝜔--------------(2)
𝜔𝜔 =
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
---------------------------------------(3)
𝑒𝑒𝑏𝑏 = 𝐾𝐾𝑏𝑏
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
----------------------------------(4)
𝑇𝑇 ∝ ∅𝑖𝑖𝑎𝑎 = 𝑘𝑘𝑚𝑚1∅𝑖𝑖𝑎𝑎 = 𝐾𝐾𝑚𝑚𝑖𝑖𝑎𝑎-------------(5)
𝑇𝑇 = 𝐽𝐽
𝑑𝑑2
𝜃𝜃
𝑑𝑑𝑡𝑡2
+ 𝐶𝐶
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
--------------------------(6)
Take Laplace Transform of (1), (2), (3), (4), (5), (6)
𝑉𝑉𝑎𝑎(𝑠𝑠) = 𝑅𝑅𝑎𝑎𝐼𝐼𝑎𝑎(𝑠𝑠) + 𝐿𝐿𝑎𝑎𝑠𝑠𝐼𝐼𝑎𝑎(𝑠𝑠) + 𝐸𝐸𝑏𝑏(𝑠𝑠)--------------------------------(a)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)-------------------------------------------------------(b)
(a), (b) → [𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝐼𝐼𝑎𝑎(𝑠𝑠)+𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠) = 𝑉𝑉𝑎𝑎(𝑠𝑠)--------------------(c)
𝜔𝜔(𝑠𝑠) = 𝑠𝑠𝜃𝜃(𝑠𝑠)-----------------------------------------------------------(d)
(b), (d) → 𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠)-----------------------------------------(e)
𝑇𝑇(𝑠𝑠) = 𝐾𝐾𝑚𝑚𝐼𝐼𝑎𝑎(𝑠𝑠)--------------------------------------------------------(f)
𝑇𝑇(𝑠𝑠) = 𝑠𝑠2
𝐽𝐽𝜃𝜃(𝑠𝑠) + 𝐶𝐶𝐶𝐶𝜃𝜃(𝑠𝑠) = [𝐽𝐽𝐽𝐽 + 𝐶𝐶]𝑠𝑠𝜃𝜃(𝑠𝑠) = [𝐽𝐽𝐽𝐽 + 𝐶𝐶]𝜔𝜔(𝑠𝑠)------(g)
[𝐽𝐽𝐽𝐽 + 𝐶𝐶]𝜔𝜔(𝑠𝑠) = 𝐾𝐾𝑚𝑚𝐼𝐼𝑎𝑎(𝑠𝑠)----------------------------------------------(h)
13. (c)→ 𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠) = [𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝐼𝐼𝑎𝑎(𝑠𝑠)
(e): 𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
(f): 𝑇𝑇(𝑠𝑠) = 𝐾𝐾𝑚𝑚𝐼𝐼𝑎𝑎(𝑠𝑠)
(h): [𝐽𝐽𝐽𝐽 + 𝐶𝐶]𝜔𝜔(𝑠𝑠) = 𝐾𝐾𝑚𝑚𝐼𝐼𝑎𝑎(𝑠𝑠)
(d): 𝜔𝜔(𝑠𝑠) = 𝑠𝑠𝜃𝜃(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐼𝐼𝑎𝑎(𝑠𝑠)
1
𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎
𝜔𝜔(𝑠𝑠) 𝐸𝐸𝑏𝑏(𝑠𝑠)
𝐾𝐾𝑏𝑏
𝐼𝐼𝑎𝑎(𝑠𝑠) 𝑇𝑇(𝑠𝑠)
𝐾𝐾𝑚𝑚
𝐾𝐾𝑚𝑚𝐼𝐼𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
1
�𝐽𝐽𝐽𝐽+𝐶𝐶�
𝑉𝑉𝑎𝑎(𝑠𝑠)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐼𝐼𝑎𝑎(𝑠𝑠)
1
𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎
𝐾𝐾𝑚𝑚
𝑇𝑇(𝑠𝑠) 1
�𝐽𝐽𝐽𝐽+𝐶𝐶�
𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑏𝑏
𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝐽𝐽+𝐶𝐶�
𝜔𝜔(𝑠𝑠) 𝜃𝜃(𝑠𝑠)
1
𝑠𝑠
14. 𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜃𝜃(𝑠𝑠)
𝐾𝐾𝑚𝑚
𝑆𝑆 �𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝐽𝐽+𝐶𝐶� + 𝑠𝑠𝑠𝑠𝑚𝑚𝐾𝐾𝑏𝑏
𝜽𝜽(𝒔𝒔)
𝑽𝑽𝒂𝒂(𝒔𝒔)
=
𝑲𝑲𝒎𝒎
𝒔𝒔(𝑳𝑳𝒂𝒂𝒔𝒔 + 𝑹𝑹𝒂𝒂)(𝑱𝑱𝑱𝑱 + 𝑪𝑪) + 𝒔𝒔𝒔𝒔𝒎𝒎𝑲𝑲𝒃𝒃
𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝐽𝐽+𝐶𝐶�
1
𝑠𝑠
𝑆𝑆𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝐽𝐽+𝐶𝐶�
1
𝑠𝑠
𝑠𝑠𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) 𝐾𝐾𝑚𝑚
𝑆𝑆 �𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝐽𝐽+𝐶𝐶�
𝜃𝜃(𝑠𝑠)
𝜃𝜃(𝑠𝑠)
𝜃𝜃(𝑠𝑠)
15. Block Diagram Angular Position Control System
Apply K.V.L
𝑒𝑒𝑎𝑎 = 𝑅𝑅𝑎𝑎𝑖𝑖𝑎𝑎 + 𝐿𝐿
𝑑𝑑𝑖𝑖𝑎𝑎
𝑑𝑑𝑡𝑡
+ 𝑒𝑒𝑏𝑏-------------------(1)
𝑒𝑒𝑏𝑏 ∝ ∅𝜔𝜔 = 𝑘𝑘𝑏𝑏1∅𝜔𝜔 = 𝐾𝐾𝑏𝑏𝜔𝜔--------------(2)
𝜔𝜔 =
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
---------------------------------------(3)
𝑒𝑒𝑏𝑏 = 𝐾𝐾𝑏𝑏
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
----------------------------------(4)
𝑇𝑇 ∝ ∅𝑖𝑖𝑎𝑎 = 𝑘𝑘𝑡𝑡1∅𝑖𝑖𝑎𝑎 = 𝐾𝐾𝑡𝑡𝑖𝑖𝑎𝑎-------------(5)
𝑅𝑅𝑎𝑎 𝐿𝐿𝑎𝑎
𝑒𝑒𝑎𝑎 𝑒𝑒𝑏𝑏
𝐽𝐽𝑀𝑀 𝐵𝐵𝑀𝑀
𝜃𝜃𝑀𝑀
𝑁𝑁1
𝑁𝑁2
𝐽𝐽𝐿𝐿 𝐵𝐵𝐿𝐿
𝑖𝑖𝑎𝑎
+
−
+
−
𝑒𝑒𝑎𝑎 𝑒𝑒𝑏𝑏
+
−
+
−
𝑅𝑅𝑎𝑎 𝐿𝐿𝑎𝑎
𝑖𝑖𝑎𝑎
𝐵𝐵𝑒𝑒𝑒𝑒
𝜃𝜃
𝐽𝐽𝑒𝑒𝑒𝑒
𝑇𝑇𝑀𝑀
𝑇𝑇 𝐽𝐽𝑒𝑒𝑒𝑒 = 𝐽𝐽𝑀𝑀 + 𝐽𝐽𝐿𝐿 �
𝑁𝑁1
𝑁𝑁2
�
2
𝐵𝐵𝑒𝑒𝑒𝑒 = 𝐵𝐵𝑀𝑀 + 𝐵𝐵𝐿𝐿 �
𝑁𝑁1
𝑁𝑁2
�
2
16. 𝑇𝑇 = 𝐽𝐽𝑒𝑒𝑒𝑒
𝑑𝑑2
𝜃𝜃
𝑑𝑑𝑡𝑡2
+ 𝐵𝐵𝑒𝑒𝑒𝑒
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
--------------------------(6)
Take Laplace Transform of (1), (2), (3), (4), (5), (6)
𝐸𝐸𝑎𝑎(𝑠𝑠) = 𝑅𝑅𝑎𝑎𝐼𝐼𝑎𝑎(𝑠𝑠) + 𝐿𝐿𝑎𝑎𝑠𝑠𝐼𝐼𝑎𝑎(𝑠𝑠) + 𝐸𝐸𝑏𝑏(𝑠𝑠)--------------------------------(a)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)-------------------------------------------------------(b)
(a), (b) → [𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝐼𝐼𝑎𝑎(𝑠𝑠)+𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠) = 𝐸𝐸𝑎𝑎(𝑠𝑠)--------------------(c)
𝜔𝜔(𝑠𝑠) = 𝑠𝑠𝜃𝜃(𝑠𝑠)-----------------------------------------------------------(d)
(b), (d) → 𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠)-----------------------------------------(e)
(c), (d) → [𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝐼𝐼𝑎𝑎(𝑠𝑠)+𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠) = 𝐸𝐸𝑎𝑎(𝑠𝑠)--------------------(f)
𝑇𝑇(𝑠𝑠) = 𝐾𝐾𝑡𝑡𝐼𝐼𝑎𝑎(𝑠𝑠)--------------------------------------------------------(g)
𝑇𝑇(𝑠𝑠) = 𝑠𝑠2
𝐽𝐽𝑒𝑒𝑒𝑒𝜃𝜃(𝑠𝑠) + 𝐵𝐵𝑒𝑒𝑒𝑒𝑠𝑠𝜃𝜃(𝑠𝑠) = �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝑠𝑠𝜃𝜃(𝑠𝑠)--------------(h)
�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝑠𝑠𝜃𝜃(𝑠𝑠) = 𝐾𝐾𝑡𝑡𝐼𝐼𝑎𝑎(𝑠𝑠)----------------------------------------------(i)
(g)→ 𝐼𝐼𝑎𝑎(𝑠𝑠) =
1
𝐾𝐾𝑡𝑡
𝑇𝑇(𝑠𝑠)---------------------------------------------(j)
(f),(j) →
[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝑇𝑇(𝑠𝑠)
𝐾𝐾𝑡𝑡
+𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠) = 𝐸𝐸𝑎𝑎(𝑠𝑠)----------------------(k)
(h),(k) →
[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝑠𝑠𝜃𝜃(𝑠𝑠)
𝐾𝐾𝑡𝑡
+𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠) = 𝐸𝐸𝑎𝑎(𝑠𝑠)
[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝑠𝑠𝜃𝜃(𝑠𝑠)+𝐾𝐾𝑡𝑡𝐾𝐾𝑏𝑏𝑠𝑠𝜃𝜃(𝑠𝑠)
𝐾𝐾𝑡𝑡
= 𝐸𝐸𝑎𝑎(𝑠𝑠)
�
[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝑠𝑠+𝐾𝐾𝑡𝑡𝐾𝐾𝑏𝑏𝑠𝑠
𝐾𝐾𝑡𝑡
� 𝜃𝜃(𝑠𝑠) = 𝐸𝐸𝑎𝑎(𝑠𝑠)
𝜃𝜃(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠)
=
𝐾𝐾𝑡𝑡
𝑠𝑠�[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�+𝐾𝐾𝑡𝑡𝐾𝐾𝑏𝑏�
(c)→ 𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠) = [𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]𝐼𝐼𝑎𝑎(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐼𝐼𝑎𝑎(𝑠𝑠)
1
𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎
17. (b): 𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
(g): 𝑇𝑇(𝑠𝑠) = 𝐾𝐾𝑡𝑡𝐼𝐼𝑎𝑎(𝑠𝑠)
(i),(h): �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�𝜔𝜔(𝑠𝑠) = 𝐾𝐾𝑡𝑡𝐼𝐼𝑎𝑎(𝑠𝑠)
(d): 𝜔𝜔(𝑠𝑠) = 𝑠𝑠𝜃𝜃(𝑠𝑠)
𝜔𝜔(𝑠𝑠) 𝐸𝐸𝑏𝑏(𝑠𝑠)
𝐾𝐾𝑏𝑏
𝐼𝐼𝑎𝑎(𝑠𝑠) 𝑇𝑇(𝑠𝑠)
𝐾𝐾𝑡𝑡
𝐾𝐾𝑡𝑡𝐼𝐼𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
1
�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒
𝐸𝐸𝑎𝑎(𝑠𝑠)
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐼𝐼𝑎𝑎(𝑠𝑠)
1
𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎
𝐾𝐾𝑡𝑡
𝑇𝑇(𝑠𝑠) 1
�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒
𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑏𝑏
𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒�
𝜔𝜔(𝑠𝑠) 𝜃𝜃(𝑠𝑠)
1
𝑠𝑠
𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒�
1
𝑠𝑠
𝜃𝜃(𝑠𝑠)
18. 𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜃𝜃(𝑠𝑠)
𝐾𝐾𝑡𝑡
𝑠𝑠�[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�+𝐾𝐾𝑡𝑡𝐾𝐾𝑏𝑏�
𝜃𝜃(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠)
=
𝐾𝐾𝑡𝑡
𝑠𝑠�[𝐿𝐿𝑎𝑎𝑠𝑠 + 𝑅𝑅𝑎𝑎]�𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠 + 𝐵𝐵𝑒𝑒𝑒𝑒�+𝐾𝐾𝑡𝑡𝐾𝐾𝑏𝑏�
𝑆𝑆𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝑉𝑉𝑎𝑎(𝑠𝑠) 𝜔𝜔(𝑠𝑠)
𝐾𝐾𝑚𝑚
�𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒�
1
𝑠𝑠
𝑠𝑠𝐾𝐾𝑏𝑏
𝐸𝐸𝑏𝑏(𝑠𝑠) = 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) − 𝐾𝐾𝑏𝑏𝜔𝜔(𝑠𝑠)
𝐸𝐸𝑎𝑎(𝑠𝑠) 𝐾𝐾𝑡𝑡
𝑆𝑆 �𝐿𝐿𝑎𝑎𝑠𝑠+𝑅𝑅𝑎𝑎� �𝐽𝐽𝑒𝑒𝑒𝑒𝑠𝑠+𝐵𝐵𝑒𝑒𝑒𝑒�
𝜃𝜃(𝑠𝑠)
𝜃𝜃(𝑠𝑠)