
Recommandé
Recommandé
Contenu connexe
Dernier
Dernier (16)
En vedette
En vedette (20)
Asservicement_le_02_12_2019pdf.pdf
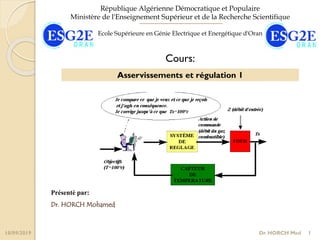
- 1. 1 Cours: Asservissements et régulation 1 Présenté par: Dr. HORCH Mohamed Dr. HORCH Med République Algérienne Démocratique et Populaire Ministère de l'Enseignement Supérieur et de la Recherche Scientifique Ecole Supérieure en Génie Electrique et Energétique d'Oran 18/09/2019
- 2. 2 Dr. HORCH Med 18/09/2019 2 La commande et l'interprétation du comportement de procédés industriels ou de phénomènes physiques naturels font partie des tâches qui incombent à l'ingénieur. Ce dernier est confronté à une réalité qu'il lui faudra domestiquer et/ou comprendre pour en tirer le meilleur parti. Au centre de cette connaissance se trouve le concept de système, concept que l'on retrouve dans un grand nombre de disciplines et techniques : contrôle de procédé, techniques d'optimisation, traitement du signal, filtrage, mathématique des équation différentielles, etc. Dans le cadre de ce cours, nous nous intéressons principalement à l'étude des "systèmes" à la fois continus et linéaires, qui sont représentés sous forme de fonction de transfert (représentation externe, dite encore de la "boîte noire") ; ces trois conditions AVANT–PROPOS
- 3. 3 Dr. HORCH Med 18/09/2019 3 INTRODUCTION AUX ASSERVISSEMENTS
- 4. 4 Dr. HORCH Med 18/09/2019 4 INTRODUCTION AUX ASSERVISSEMENTS
- 5. 5 Dr. HORCH Med 18/09/2019 5 INTRODUCTION AUX ASSERVISSEMENTS
- 6. 6 Dr. HORCH Med 18/09/2019 6 INTRODUCTION AUX ASSERVISSEMENTS
- 7. 7 Dr. HORCH Med 18/09/2019 7 INTRODUCTION AUX ASSERVISSEMENTS
- 8. 8 Dr. HORCH Med 18/09/2019 8 INTRODUCTION AUX ASSERVISSEMENTS
- 9. 9 Dr. HORCH Med 18/09/2019 9 INTRODUCTION AUX ASSERVISSEMENTS
- 10. 10 Dr. HORCH Med 18/09/2019 10 INTRODUCTION AUX ASSERVISSEMENTS
- 11. 11 Dr. HORCH Med 18/09/2019 11 INTRODUCTION AUX ASSERVISSEMENTS
- 12. 1212 Dr. HORCH Med 18/09/2019 12 INTRODUCTION AUX ASSERVISSEMENTS
- 13. 13 Dr. HORCH Med 18/09/2019 13 INTRODUCTION AUX ASSERVISSEMENTS
- 14. 14 Dr. HORCH Med 18/09/2019 14 INTRODUCTION AUX ASSERVISSEMENTS
- 15. 15 Dr. HORCH Med 18/09/2019 15 INTRODUCTION AUX ASSERVISSEMENTS
- 16. 16 Dr. HORCH Med 18/09/2019 16 INTRODUCTION AUX ASSERVISSEMENTS Principes des systèmes de contrôle:
- 17. 17 Dr. HORCH Med 18/09/2019 17 INTRODUCTION AUX ASSERVISSEMENTS
- 18. 18 Dr. HORCH Med 18/09/2019 18 INTRODUCTION AUX ASSERVISSEMENTS
- 19. 19 Dr. HORCH Med 18/09/2019 19 Représentation des systèmes dynamiques linéaires et continus 1 Notion de système:
- 20. 20 Dr. HORCH Med 18/09/2019 20 Représentation des systèmes dynamiques linéaires et continus
- 21. 21 Dr. HORCH Med 18/09/2019 21 Représentation des systèmes dynamiques linéaires et continus 2 Classification des systèmes:
- 22. 22 Dr. HORCH Med 18/09/2019 22 Représentation des systèmes dynamiques linéaires et continus 2 Classification des systèmes:
- 23. 23 Dr. HORCH Med 18/09/2019 23 Représentation des systèmes dynamiques linéaires et continus 2 Classification des systèmes:
- 24. 24 Dr. HORCH Med 18/09/2019 24 Représentation des systèmes dynamiques linéaires et continus 3 Modélisation mathématique des systèmes : La modélisation mathématique est l’un des taches les plus importantes pour l’automatisation des systèmes (analyser puis commander un système). Elle consiste à trouver une relation mathématique (sous forme d’équation différentielle) entre l’entrée et la sortie. Il existe plusieurs catégories de système : électrique, mécanique, électromécanique, hydraulique, pneumatique, …… Objectifs de la modélisation : Comprendre et analyser le dispositif. Pouvoir prédire son comportement. Pouvoir utiliser des outils de simulation. Donc : un modèle est toujours une représentation rapprochée de la réalité.
- 25. 25 Dr. HORCH Med 18/09/2019 25 Représentation des systèmes dynamiques linéaires et continus Méthode Classique: Consiste à résoudre l'équation différentielle décrivant ce système, c'est– à–dire trouver une réponse forcée et une réponse libre pour le système. Mais cette méthode ne permet pas toujours de trouver une solution et peut amener à une difficulté de résolution dès que l'ordre de l'équation différentielle dépasse 2 L'écriture des équations différentielles Appliquer les lois de la physique Systèmes électriques: lois de kirchhoff. Systèmes mécanique: lois de Newton. Systèmes thermiques: équilibres des énergies calorifique. Un système dynamique linéaire peut être représenté par une équation différentielle à coefficients constants liant les grandeurs d’entrée et de sortie. L’équation générale d’un système linéaire est de la forme: Rq: dans le cas des systèmes réels n≥k.
- 26. 26 Dr. HORCH Med 18/09/2019 26 Représentation des systèmes dynamiques linéaires et continus Exemple 1: Exemple 2:
- 27. 27 Dr. HORCH Med 18/09/2019 27 Représentation des systèmes dynamiques linéaires et continus Exemple 3:
- 28. 28 Dr. HORCH Med 18/09/2019 28 Représentation des systèmes dynamiques linéaires et continus Exemple 4:
- 29. 29 Dr. HORCH Med 18/09/2019 29 NOTION DE FONCTION DETRANSFERT Méthode Opérationnelle: Basée sur le calcul opérationnel ou, essentiellement, sur la transformée de Laplace qui mettra en relation, une fonction de la variable du temps f(t) avec une fonction de la variable complexe F(p) dépendant de la pulsation.
- 30. 30 Dr. HORCH Med 18/09/2019 29 NOTION DE FONCTION DETRANSFERT Méthode Opérationnelle:
- 31. 31 Dr. HORCH Med 18/09/2019 30 Méthode Opérationnelle: NOTION DE FONCTION DETRANSFERT
- 32. 32 Dr. HORCH Med 18/09/2019 31 Méthode Opérationnelle: NOTION DE FONCTION DETRANSFERT
- 33. 33 Dr. HORCH Med 18/09/2019 32 Méthode Opérationnelle: NOTION DE FONCTION DETRANSFERT
- 34. 34 Dr. HORCH Med 18/09/2019 33 Méthode Opérationnelle: NOTION DE FONCTION DETRANSFERT
- 35. 35 Dr. HORCH Med 18/09/2019 34 Méthode Opérationnelle: NOTION DE FONCTION DETRANSFERT
- 36. 36 Dr. HORCH Med 18/09/2019 35 Représentation des systèmes dynamiques linéaires et continus Exemple 1:
- 37. 37 Dr. HORCH Med 18/09/2019 36 Représentation des systèmes dynamiques linéaires et continus Exemple 1: La transformée de Laplace
- 38. 38 Dr. HORCH Med 18/09/2019 37 Représentation des systèmes dynamiques linéaires et continus
- 39. 39 Dr. HORCH Med 18/09/2019 38 Représentation des systèmes dynamiques linéaires et continus
- 40. 40 Dr. HORCH Med 18/09/2019 39 Représentation des systèmes dynamiques linéaires et continus
- 41. 40 Dr. HORCH Med 18/09/2019 40 Représentation des systèmes dynamiques linéaires et continus
- 42. 42 Dr. HORCH Med 18/09/2019 41 Représentation des systèmes dynamiques linéaires et continus
- 43. 43 Dr. HORCH Med 18/09/2019 42 Représentation des systèmes dynamiques linéaires et continus
- 44. 44 Dr. HORCH Med 18/09/2019 43 Représentation des systèmes dynamiques linéaires et continus
- 45. 45 Dr. HORCH Med 18/09/2019 44 Représentation des systèmes dynamiques linéaires et continus
- 46. 46 Dr. HORCH Med 18/09/2019 45 NOTION DE FONCTION DETRANSFERT
- 47. 47 Dr. HORCH Med 18/09/2019 46 NOTION DE FONCTION DETRANSFERT
- 48. 48 Dr. HORCH Med 18/09/2019 47 NOTION DE FONCTION DETRANSFERT
- 49. 49 Dr. HORCH Med 18/09/2019 48 NOTION DE FONCTION DETRANSFERT
- 50. 49 Dr. HORCH Med 18/09/2019 49 NOTION DE FONCTION DETRANSFERT
- 51. 51 Dr. HORCH Med 18/09/2019 50 NOTION DE FONCTION DETRANSFERT
- 52. 52 Dr. HORCH Med 18/09/2019 51 NOTION DE FONCTION DETRANSFERT
- 53. 53 Dr. HORCH Med 18/09/2019 52 NOTION DE FONCTION DETRANSFERT
- 54. 54 Dr. HORCH Med 18/09/2019 53 NOTION DE FONCTION DETRANSFERT
- 55. 55 Dr. HORCH Med 18/09/2019 54 NOTION DE FONCTION DETRANSFERT
- 56. 56 Dr. HORCH Med 18/09/2019 55 NOTION DE FONCTION DETRANSFERT
- 57. 57 Dr. HORCH Med 18/09/2019 56 NOTION DE FONCTION DETRANSFERT
- 58. 58 Dr. HORCH Med 18/09/2019 57 NOTION DE FONCTION DETRANSFERT Exemple 1:
- 59. 59 Dr. HORCH Med 18/09/2019 58 NOTION DE FONCTION DETRANSFERT Exemple 1: Dr. HORCH Med
- 60. 60 18/09/2019 59 NOTION DE FONCTION DETRANSFERT Exemple 1: Dr. HORCH Med
- 61. 61 18/09/2019 60 NOTION DE FONCTION DETRANSFERT Exemple 1: Dr. HORCH Med
- 62. 62 18/09/2019 61 NOTION DE FONCTION DETRANSFERT Exemple 1: Dr. HORCH Med
- 63. 63 18/09/2019 62 NOTION DE FONCTION DETRANSFERT Dr. HORCH Med
- 64. 64 18/09/2019 63 NOTION DE FONCTION DETRANSFERT Dr. HORCH Med
- 65. 65 18/09/2019 63 NOTION DE FONCTION DETRANSFERT Dr. HORCH Med
- 66. 66 18/09/2019 64 Caracteristiques et performances des systèmes asservis Dr. HORCH Med
- 67. 67 18/09/2019 65 Caracteristiques et performances des systèmes asservis Dr. HORCH Med
- 68. 18/09/2019 66 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 69. 69 18/09/2019 67 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 70. 70 18/09/2019 68 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 71. 69 18/09/2019 69 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 72. 72 18/09/2019 70 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 73. 67 18/09/2019 71 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 74. 74 18/09/2019 72 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 75. 75 18/09/2019 73 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 76. 76 18/09/2019 74 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 77. 77 18/09/2019 75 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 78. 78 18/09/2019 76 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 79. 79 18/09/2019 77 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 80. 80 18/09/2019 78 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Remarque:
- 81. 81 18/09/2019 79 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 82. 82 18/09/2019 80 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 83. 83 18/09/2019 81 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 84. 84 18/09/2019 82 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 85. 85 18/09/2019 83 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 1:
- 86. 86 18/09/2019 84 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 87. 87 18/09/2019 85 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 88. 88 18/09/2019 86 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 2:
- 89. 89 18/09/2019 87 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 90. 90 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 91. 91 18/09/2019 86 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 3:
- 92. 92 18/09/2019 86 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 4:
- 93. 93 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 94. 94 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 95. 95 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Remarque:
- 96. 96 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 97. 97 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 98. 98 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 99. 99 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 100. 100 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 101. 101 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 102. 102 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 103. 103 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 104. 104 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 105. 105 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exemple:
- 106. 106 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 1:
- 107. 107 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 2:
- 108. 108 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med
- 109. 109 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 3:
- 110. 110 18/09/2019 88 Caractéristiques et performances des systèmes asservis Dr. HORCH Med Exercice 4:
- 111. 110 18/09/2019 110 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 112. 112 18/09/2019 111 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 113. 113 18/09/2019 112 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 114. 114 18/09/2019 113 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 115. 115 18/09/2019 114 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 116. 18/09/2019 115 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 117. 117 18/09/2019 116 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 118. 118 18/09/2019 117 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 119. 119 18/09/2019 118 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 120. 120 18/09/2019 119 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 121. 121 18/09/2019 120 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 122. 122 18/09/2019 121 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 123. 123 18/09/2019 122 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 124. 18/09/2019 123 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 125. 125 18/09/2019 124 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med
- 126. 126 18/09/2019 125 STABILITE DES SYSTEMES ASSERVIS LINEAIRES Dr. HORCH Med