Descargar como PDF, PPTX






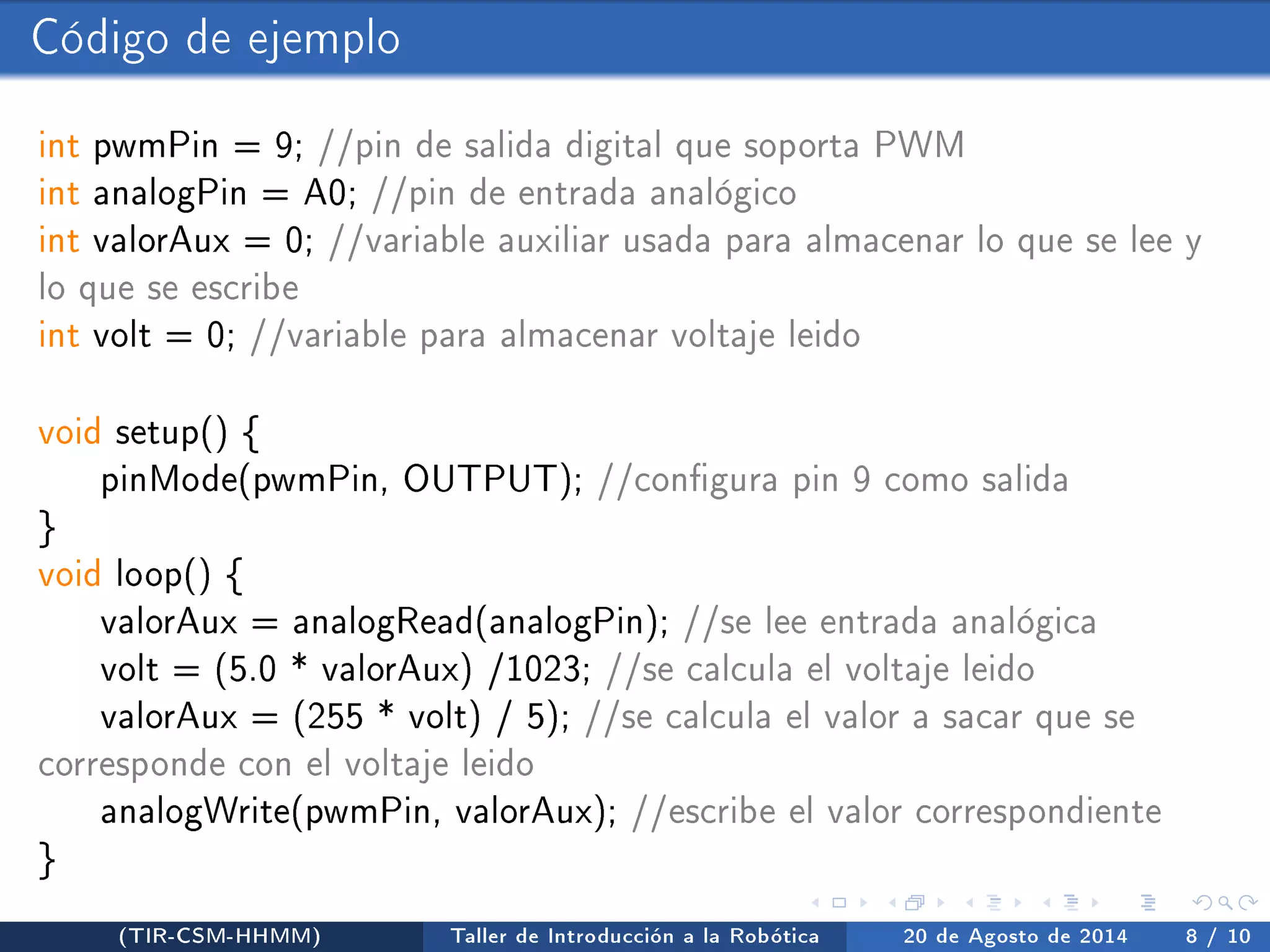

Este documento presenta un taller de introducción a la robótica que se llevará a cabo el 20 de agosto de 2014. El taller cubrirá los pines de entrada analógicos, las salidas PWM del Arduino, un ejemplo de código y un ejercicio práctico para controlar el brillo de un LED usando pines analógicos y PWM.











































































































