El documento describe diferentes mecanismos para transformar diferentes tipos de movimiento, incluyendo la transformación de movimiento rectilíneo a rectilíneo usando palancas y ruedas troncocónicas, de rotación a rectilíneo usando poleas y de rotación a rotación usando ruedas de fricción, correas, cadenas y diferentes tipos de engranajes, y de rotación a movimiento alternativo usando mecanismos como levas y seguidores.
1. MECANISMOS
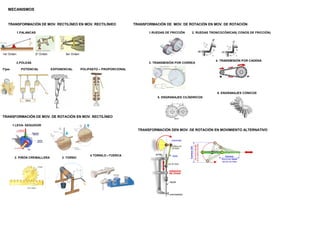
TRANSFORMACIÓN DE MOV. RECTILÍNEO EN MOV. RECTILÍNIEO
1.PALANCAS 2. RUEDAS TRONCOCÓNICAS( CONOS DE FRICCIÓN)
TRANSFORMACIÓN DE MOV. DE ROTACIÓN EN MOV. RECTILÍNEO
1er Orden 2º Orden 3er Orden
2.POLEAS
Fijas POTENCIAL EXPONENCIAL POLIPASTO – PROPORCIONAL
TRANSFORMACIÓN DE MOV. DE ROTACIÓN EN MOV. DE ROTACIÓN
1.RUEDAS DE FRICCIÓN
3. TRANSMISIÓN POR CORREA
4. TRANSMISIÓN POR CADENA
5. ENGRANAJES CILÍNDRICOS
6. ENGRANAJES CÓNICOS
1.LEVA- SEGUIDOR
2. PIÑÓN CREMALLERA 3. TORNO
4.TORNILO –TUERCA
TRANSFORMACIÓN DEN MOV. DE ROTACIÓN EN MOVIMIENTO ALTERNATIVO