スプリングセミナー2016 "光学特性の計測と表現"
•
1 recomendación•1,023 vistas

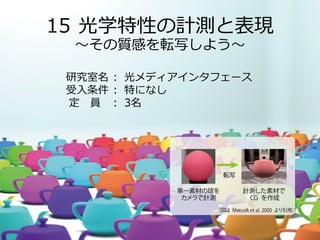
Computer Graphicsでリアルな材質を表現するのは容易ではありません.このテーマでは,カメラを使って単一の素材でできた球体の光学特性を計測し,その特性でComputer Graphicsを描画することで,その材質を表現するComputer Vision & Computer Graphics技術を体験してもらいます. http://isw3.naist.jp/IS/PubWG/Spring2016/index-ja.html

Recomendados
Más contenido relacionado
Más de 奈良先端大 情報科学研究科
Más de 奈良先端大 情報科学研究科 (20)
スプリングセミナー2016 "光学特性の計測と表現"
- 1. 15 光学特性の計測と表現 ~その質感を転写しよう~ 研究室名: 光メディアインタフェース 受入条件: 特になし 定 員 : 3名
- 2. 質感転写の流れ • 計測 • 質感が分かるような撮影環境を構築して カメラで単一素材の球を撮影 • データ処理 • 画像から球の「質感」を抽出して, データとして出力 • 表現 • 抽出した「質感」でCGを作成