ADA - Minimum Spanning Tree Prim Kruskal and Dijkstra
•Descargar como PPT, PDF•
21 recomendaciones•13,739 vistas

Topics Covered Minimum Spanning Tree, Prim's Algorithm Kruskal's Algorith and Shortest Path Algorithm (Dijkstra)

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (18)
Similar a ADA - Minimum Spanning Tree Prim Kruskal and Dijkstra
Similar a ADA - Minimum Spanning Tree Prim Kruskal and Dijkstra (20)
Último
Último (20)
ADA - Minimum Spanning Tree Prim Kruskal and Dijkstra
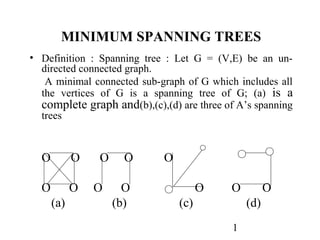
- 1. 1 MINIMUM SPANNING TREES • Definition : Spanning tree : Let G = (V,E) be an un- directed connected graph. A minimal connected sub-graph of G which includes all the vertices of G is a spanning tree of G; (a) is a complete graph and(b),(c),(d) are three of A’s spanning trees O O O O O O O O O O O O (a) (b) (c) (d)
- 2. 2 APPLICATIONS OF SPANNING TREES • Spanning trees can be used to obtain an independent set of circuit equations for an electrical network. • Let B be the set of network edges not in the spanning tree. • Adding an edge from B to the spanning tree creates a cycle. • Different edges from B result in different cycles.
- 3. 3 APPLICATIONS OF SPANNING TREES (Contd..) • Kirchoff’s second law is used on each cycle to obtain a circuit equation. • The cycles obtained in this way are independent as each contains one edge from B which is not contained in any other cycle. • Hence the circuit equations so obtained are also independent.
- 4. 4 MINIMUM SPANNING TREES • Thus a spanning tree is a minimal sub-graph G1 of G such that V(G) = V(G1 ) and G1 is connected. • A connected graph with n vertices must have at least n-1 edges and all connected graphs with n-1 edges are trees. • If the nodes of G represent cities and the edges represent possible communication links connecting two cities, the minimum number of links needed to connect the n cities is n-1.
- 5. 5 MINIMUM SPANNING TREES (Contd..) • The spanning trees of G will represent all feasible choices. • In practice, the edges will have weights associated with them. • These might represent the cost of construction, the length of the link etc. • We are interested in finding a spanning tree of G with minimum cost.
- 6. 6 Greedy method to obtain a minimum cost spanning tree Prim’s algorithm • If A is the set of edges selected so far, then A forms a tree. • The next edges (u,v) to be included in A is a minimum cost edge not in A with the property that A U {u, v} is also a tree.
- 7. 7 Prim’s Algorithm for minimum cost spanning tree example Example :Consider a graph G with 6 vertices as follows 2 10 50 1 40 3 45 35 5 30 25 15 55 4 6 20
- 8. 8 Prim’s Algorithm for minimum cost spanning tree example (Contd..) Edge Cost Spanning tree (1,2) 10 10 1 2 (2,6) 25 10 1 2 6 25 (3,6) 15 10 1 2 25 6 15 3
- 9. 9 Prim’s Algorithm for minimum cost spanning tree example (Contd..) Edge Cost Spanning tree (6,4) 20 10 1 2 25 4 20 6 15 3 (1,4) Reject (3,5) 35 10 1 2 5 25 4 20 6 15 3 35 The cost of the spanning tree is 105
- 10. 10 PRIM’s algorithm to find minimum cost spanning tree Procedure PRIM (E,cost, n, T, mincost) // E is the set of edges in G // // cost (n,n) is the adjacency matrix // // such as cost (i,j) is a +ve real number // // or cost (i,j) is ∞ if no edge (i,j) exists // // A minimum cost spanning tree is // // computed and stored as a set // // of edges in the array T(1:n-1, 2) // // (T(i,1), T(i,2) is an edge in minimum cost spanning tree //
- 11. 11 PRIM’s algorithm to find minimum cost spanning tree contd.. Real cost (n,n), mincost; Integer near(n),i,j,k,l,T(1:n-1,2) (k,l) edge with minimum cost 4 mincost cost (k,l) (T(1,1) T(1,2) ) (k,l) // initialize spanning tree// for i 1 to n do // with minimum cost edge if cost (i, L) < cost (i, k) then // near(i) is one of near (i) L else near (i) k // vertices of edges endif // already included repeat
- 12. 12 PRIM’s algorithm to find minimum cost spanning tree contd.. 10 near(k) near (L) 0 // (k, L) is already // in the tree or k and L are vertices in spanning tree 11 for i 2 to n-1 do //find n-2 additional //edges for T // 12 Let j be an index such that NEAR (J) ≠ 0 and COST (J,NEAR(J)) is minimum
- 13. 13 PRIM’s algorithm to find minimum cost spanning tree contd.. (T(i,1),T(i,2)) (j, NEAR (j)) Mincost mincost + cost (j, near (j)) NEAR (j) 0 16 for k 1 to n do // update near in view of newly // included edge // if NEAR (k) ≠ 0 and COST(k near (k)) > cost(k,j) then NEAR (k) j endif 20 repeat // end for k is 1 to n 21 repeat // end for i is 2 to n-1 if mincost > ∞ then print (‘no spanning tree’) endif END PRIM Complexity of Prim’s algorithm is O(n3 ) ; n is the number of vertices
- 14. 14 Explanation of Prim’s algorithm • near(k) =0 means zero is a fictious vertex such that cost(k,0) is always minimum; it means you need not find any vertex near to K or L or near to any other vertex already included in the spanning tree • near (k) ≠ 0 means consider vertices which are not included in the spanning tree • After including a minimum cost edge near (i) is computed for each i= 1,…n. • Near (i) is the vertex (out of the two vertices in the included edge) which is near to i. • Near (i) is computed so that after including an edge, we need to find the vertex with which we are trying to form the new /next edge in the spanning tree.
- 15. 15 Explanation of Prim’s algorithm (Contd..) • To exclude already included edges, make near (k) 0 near (L) 0 if (k, L) is included. • In the second for-loop we are finding i which forms an edge with near (i) and having minimum cost. • In the third for-loop which is included in the second for- loop we check whether near (i) values are same or, are to be updated with respect to the newly added edge or w.r.t. to the newly included vertex j. • Updating near values is required because near(i) returns a vertex (already in the spanning tree being formed) with which edge is existing and to be included and it may change dynamically due to inclusion of new edge and hence new vertex • For example near(3) is 2 and cost(3,2) is 50 when (2,6) is included, near(3) may be 1 or 2 or 6 As cost(3,6) < cost(3,2) (15 <50) near(3) is 6 (changed from 2 to 6)
- 16. 16 Explanation of Prim’s algorithm (Contd..) Example: Minimum cost edge (1, 2) with cost 10 is included Near (3) 2 Near (4) 1 Near (5) 2 Near (6) 2 Near (1) 0 Near (2)0 Select out of 3,4,5,6 a vertex such that {Cost (3, 2) = 50 Cost (4, 1) = 30 Cost (5, 2) = 40
- 17. 17 Explanation of Prim’s algorithm (Contd..) Cost (6, 2) = 25} is minimum cleary it is 6 ∴j6 so the edge j, near (j) i.e. (6, 2) is included. Now let us update near (k) values k =1…6 Near (1) = near (2) = near (6) = 0 K=3, cost (3, near (3) = 2) = 50 > cost (3, 6) =15 ∴ near (3) is 6 near (4) 6 cost (4,1) = 30 > cost (4,6) = 20 near (5) 2 cost (5,2) = 40 < cost (5,6) = 55
- 18. 18 KRUSKAL’S ALGORITHM FOR MINIMUM COST SPANNING TREE • The edges are considered in the non decreasing order. • To get the minimum cost spanning tree, the set of edges so far considered may not be a tree; but with no cycles • T will be a forest since the set of edges T can be completed into a tree iff there are no cycles in T.
- 19. 19 KRUSKAL’S ALGORITHM - Example Example: 10 1 2 25 50 30 45 40 35 3 4 5 55 15 20 6
- 20. 20 KRUSKAL’S ALGORITHM – Example (Contd..) Edge Cost Spanning forest (1,2) 10 1 2 3 4 5 6 (3,6) 15 1 2 3 4 5 6 (4,6) 20 1 2 3 5 4 6
- 21. 21 KRUSKAL’S ALGORITHM – Example (Contd..) Edge Cost Spanning forst (2,6) 25 1 2 5 3 6 4 (1,4) 30 Reject ( T will form a cycle) (3,5) 35 1 2 5 3 6 4 Stages in Kruskal’s algorithm.
- 22. 22 High level Kruskal’s algorithm For minimum cost spanning tree Let G = (V, E) T φ While T contains fewer than (n-1) edges and E ≠ φ do • Choose an edge (v, w) from E of lowest cost. • Delete (v, w) from E • If (v, w) does not create a cycle in T, then add (v, w) to T else discard (v, w).
- 23. 23 Implementation issues in Kruskal’s algorithm for minimum cost spanning tree • A tree with (n) vertices has (n-1) edges • Minheap is used to delete minimum cost edge. • To make sure that the added edge (v, w) does not form a cycle in T, (to add to T), we use UNION and FIND algorithms of sets. • The vertices are grouped in such a way that all the vertices in a connected component are placed into a set • Two vertices are connected in T iff they are in the same set.
- 24. 24 Detailed Kruskal’s algorithm for minimum cost spanning tree Procedure Kruskal (E, cost, n, T, mincost) // E is the set of edges in G. G has n vertices // // cost (u, v) is the cost of edge (u , v) T is the set of edges in the minimum cost spanning tree and mincost is the cost // real mincost, cost (1: n, 1:n) integer parent (1: n), T(1:n-1, 2), n Parent-1 //Each vertex is in a different set // i mincost 0 While (i < n -1) and (heap not empty) do delete a minimum cost edge (u,v) from the heap and reheapify using ADJUST
- 25. 25 Detailed Kruskal’s algorithm for minimum cost spanning tree contd.. JFIND (u); kFIND (v) // if j and k belong to the same set If j ≠ k then ii+1 // they form a loop as already T(i, 1) u; T (i,2) v // existing edge can not be included Mincost mincost + cost(u,v) Call union (j, k) endif Repeat if i ≠ n-1 // heap is empty but i ≠ n-1// then “no spanning tree” endif return end KRUSKAL
- 26. 26 Detailed Kruskal’s algorithm for minimum cost spanning tree- Example Initially each vertex is in a different set {1}{2}{3}{4}{5}{6} Consider(1, 2) j1= Find(1); k = 2 = Find(2) 1 ≠2 so i1 (1,2) is included and union (1,2) = {1,2} Consider (3,6) Test if (3,6) is forming a cycle with (1,2) 3 Find (3) 6 Find (6) 3 ≠ 6 so i2 (3,6) is included; UNION (3,6) = (3,6) Consider (4,6); 4 Find(4) ; Find(6) is 3 3≠ 4 so i 3 and (4, 6) is added and union (3, 4) = (3, 4, 6) Consider (2,6) Find(2) 1 [ union (1,3) is Find(6) 3 union {1,2,3,4,6} ]
- 27. 27 Detailed Kruskal’s algorithm for minimum cost spanning tree- Example contd.. Consider the next minimum cost edge (1, 4) 1 Find (1) 1 Find (4) The root of the tree in which 1 and 4 belong is the same; it means 1 and 4 form a cycle, and hence (1,4) is rejected Consider the next minimum cost edge (3, 5) 1 Find (3) 5 Find (5) 3 and 5 belong to different sets hence edge (3,5) is included
- 28. 28 Complexity of Kruskal’s algorithm • The edges are maintained as a min heap. • The next edge can be obtained / deleted in O(log e) time if G has e edges. • Reconstruction of heap using ADJUST takes O(e) time. ∴Kruskal’s algorithm takes O(e loge) time .
- 29. 29 Theorem: Kruskal’s algorithm generates a minimum cost spanning tree Proof: Let G be any undirected connected graph. • Let T be the spanning tree for G generated by Kruskal’s algorithm. • Let T1 be a minimum cost spanning tree for G. • We show that T and T1 have the same cost. Let E(T) denote the set of edges in T Let E(T1 ) denote the set of edges in T1 • If n is the number of vertices in G, T and T’ have n-1 edges. • If E(T) = E(T1 ) then T is of minimum cost and theorem is prooved.
- 30. 30 Proof of the theorem (contd..) • Assume E(T) ≠ E(T1 ).Then let e be a minimum cost edge. • Such that e∈E(T) and e∉E(T1 ) (not necessarily smallest cost edge in E(T)) • Since T1 is a minimum cost spanning tree, the inclusion of e in T1 creates a unique cycle. • Let e, e1 , e2 , e3 …. ek be this cycle. • At least one of the ei s 1≤ i ≤ k does not belong to E(T); otherwise T will also contain this cycle. • Let ej is such that ej ∉E(T). • We claim c(ej) ≥ c(e) (c( ) is the cost).
- 31. 31 Proof of the theorem (contd..) • If c(ej ) < c(e) it would have been included into T. • Also, all the edges in E(T) of cost less than the cost of e are also in E(T1 ) and do not form a cycle with ej. (e is an edge in E(T) and e∉E(T1 ); • Also E(T) and E(T1 ) have the same number of edges and hence they will have edges less cost than e • Now consider the graph with edge set E(T1 )U{e}.
- 32. 32 COMPLEXITY OF KRUSKAL’S ALGORITHM (Contd..) • Removal of any edge on the cycle e, e1 ,e2 ,….ek will leave behind a tree T11. In particular, if we remove the edge ej then the resulting tree T11 will have a cost no more than the cost of T1 . • Hence T11 is also a minimum cost tree. • By repeatedly using the transformation described above, T1 can be transformed into the spanning tree T without increase in cost. • Hence T is a minimum cost spanning tree.
- 33. 33 SINGLE SOURCE SHORTEST PATH PROBLEM • Vertices in a graph may represent cities and edges may represent sections of highway. • The weights of edges may be distance between two cities or the average time to drive from one city to the other. The shortest path problem is as below : • Given a directed graph = (V, E) a weighted function c(e) for edges e of G and a source vertex V0 . • The problem is to determine the shortest path from vo to all the remaining vertices of G. • All weights are supposed to be positive.
- 34. 34 SINGLE SOURCE SHORTEST PATH PROBLEM (Contd..) Example: 45 Path Length V0 50 V1 10 V4 1) V0V2 10 35 2) V0V2V3 25 10 20 20 30 3) V0V2V3V1 45 V2 V3 V5 4) V0V4 45 15 3 There is no path from V0 to V5
- 35. 35 GREEDY ALGORITHM TO GENERATE SHORTEST PATH • The paths are generated in non decreasing order of path length. First a shortest path to the nearest vertex is generated. • Then a shortest path to the second nearest vertex is generated and so on. • We need to determine • (i) the next vertex to which a shortest path must be generated and • (ii) a shortest path to this vertex.
- 36. 36 GREEDY ALGORITHM TO GENERATE SHORTEST PATH (Contd..) • Let S denote the set of vertices (including vo ) to which the shortest paths have already been generated. • For w ∉ S, let Dist(w) be the length of the shortest path starting from vo going through only those vertices which are in S and ending at w.
- 37. 37 Observations in Greedy Algorithm The following points need to be observed : 1. If the next shortest path is to vertex u, then the path begins at vo ends at u and goes through only those vertices which are in S. • To prove this, assume there is a vertex w on this path from Vo to u that is not in S. Thus the vo to u path also contains a path from vo to w which is of length less than vo to u path.
- 38. 38 Observations in Greedy Algorithm (Contd..) By assumption the shortest paths are being generated in non decreasing order of path length and so the shortest path vo to w must already have been generated. Hence there can be no intermediate vertex which is not in S. (ii)The destination of the next path generated must be the vertex which has the minimum distance Dist (w) among all vertices not in S.
- 39. 39 Observations in Greedy Algorithm (Contd..) (iii)Having selected a vertex u as in (ii) and generated the shortest vo to u path, vertex u becomes a member of S. - The value of Dist (w) may change. - If it changes, the length of this path is Dist (u) + c (u, w).
- 40. 40 DIJKSTRA’S SHORTEST PATH ALGORITHM Procedure SHORT-PATHS (v, cost, Dist, n) // Dist (j) is the length of the shortest path from v to j in the //graph G with n vertices; Dist (v) = 0 // Boolean S(1:n); real cost (1:n,1:n), Dist (1:n); integer u, v, n, num, i, w // S(i) = 0 if i is not in S and s(i) =1 if it is in S// // cost (i, j) = +α if edge (i, j) is not there// // cost (i,j) = 0 if i = j; cost (i, j) = weight of < i, j > // for i1 to n do // initialize S to empty // S(i) 0; Dist (i) cost(v, i) repeat
- 41. 41 DIJKSTRA’S SHORTEST PATH ALGORITHM (Contd..) // initially for no vertex shortest path is available// S (v)1; dist(v)0// Put v in set S // for num2 to n-1 do // determine n-1 paths from// //vertex v // choose u such that Dist (u)=min{dist(w)} and S(w)=0 S(u)1 // Put vertex u in S // Dist(w)min (dist(w), Dist(u) + cost (u,w)) Repeat repeat end SHORT - PATHS
- 42. 42 Dijkstra’s shortest path algorithm -example Explanation of algorithm with example 45 S(1) = 0; S(2) = 0; …, S(5) = 0 Dist(1) cost (V0,V1) = 50 V0 50 V1 10 V4 Dist(2) cost (V0,V2) 10 15 Dist(3) cost (V0,V3) + α 35 Dist(4) 45; Dist(5) α 20 10 20 Let S(V0) 1 Dist (V0) 0; 30 For num 2 to 4 do V2 V3 V5 Dist(2) = min{Dist(1)…Dist(5)} 15 3 = 10 As vertex 2 is included, ∴U 2 ∴ S(2) 1
- 43. 43 Dijkstra’s shortest path algorithm – example (Contd..) Some of Dist(3), … Dist(5) may change new Dist(3) min (old Dist(3) = α, Dist(2)+cost(2,3)) min(α,10+15) = 25 new Dist(4) min (old Dist(4) = 45, Dist(2)+cost(2,4)) min(45,10+α) = 45 new Dist(5) min (old Dist(5) = α, Dist(2)+cost(2,5)) min(α,10+ α) = α Now choose u such that dist (u)= min{Dist (3), Dist (4), Dist (5)))} i.e min { 25, 45, α } = 25 ∴U 3 S(3) 1 The process is continued. The time taken by the algorithm is 0(n2 ).
- 44. 44 Dijkstra’s shortest path algorithm – example (Contd..) • The edges on the shortest paths from a vertex v to all remaining vertices in a connected undirected graph G form a spanning tree of G called shortest path spanning tree. • Shortest path spanning tree for the above graph is :
- 45. 45 Dijkstra’s shortest path algorithm – example (Contd..) 55 1 4 1 2 25 45 25 55 45 4 30 30 25 3 8 3 4 8 2 3 4 8 5 40 20 50 40 5 30 5 15 7 2 20 5 7 35 10 5 5 7 15 6 15 10 Graph G 10 6 6 minimum cost spanning tree G Shortest path spanning tree