overviev gyrocompass parameters
•
1 recomendación•256 vistas

gyro in normal working condition

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Destacado
Destacado (16)
Similar a overviev gyrocompass parameters
Similar a overviev gyrocompass parameters (20)
Último
Último (20)
overviev gyrocompass parameters
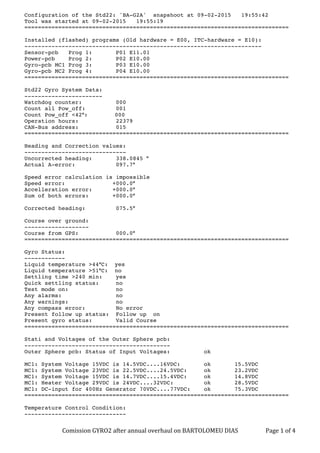
- 1. Comission GYRO2 after annual overhaul on BARTOLOMEU DIAS Page 1 of 4 Configuration of the Std22: 'BA-G2A' snapshoot at 09-02-2015 19:55:42 Tool was started at 09-02-2015 19:55:19 ============================================================================== Installed (flashed) programs (Old hardware = E00, ITC-hardware = E10): ---------------------------------------------------------------------- Sensor-pcb Prog 1: P01 E11.01 Power-pcb Prog 2: P02 E10.00 Gyro-pcb MC1 Prog 3: P03 E10.00 Gyro-pcb MC2 Prog 4: P04 E10.00 ============================================================================== Std22 Gyro System Data: ----------------------- Watchdog counter: 000 Count all Pow_off: 001 Count Pow_off <42°: 000 Operation hours: 22379 CAN-Bus address: 015 ============================================================================== Heading and Correction values: ------------------------------ Uncorrected heading: 338.0845 ° Actual A-error: 097.7° Speed error calculation is impossible Speed error: +000.0° Accelleration error: +000.0° Sum of both errors: +000.0° Corrected heading: 075.5° Course over ground: ------------------- Course from GPS: 000.0° ============================================================================== Gyro Status: ------------ Liquid temperature >44°C: yes Liquid temperature >51°C: no Settling time >240 min: yes Quick settling status: no Test mode on: no Any alarms: no Any warnings: no Any compass error: No error Present follow up status: Follow up on Present gyro status: Valid Course ============================================================================== Stati and Voltages of the Outer Sphere pcb: ------------------------------------------- Outer Sphere pcb: Status of Input Voltages: ok MC1: System Voltage 15VDC is 14.5VDC....16VDC: ok 15.5VDC MC1: System Voltage 23VDC is 22.5VDC....24.5VDC: ok 23.2VDC MC1: System Voltage 15VDC is 14.7VDC....15.4VDC: ok 14.8VDC MC1: Heater Voltage 29VDC is 24VDC....32VDC: ok 28.5VDC MC1: DC-input for 400Hz Generator 70VDC....77VDC: ok 75.3VDC ============================================================================== Temperature Control Condition: ------------------------------
- 2. Comission GYRO2 after annual overhaul on BARTOLOMEU DIAS Page 2 of 4 Heater Control Loop Monitor: ok Temperature Sensor Plausibility: ok MC2: DC at Heating Element: 10.7VDC Fan Current (if on): 000 mA 50°C Temperature: 49.7°C ============================================================================== Liquid Level Monitor: --------------------- Liquid Level at Gyro Startup (> 0.8VDC): ok 01.7VDC Liquid Level, High or Low: High Operation time with low liquid in minutes: 000000 ============================================================================== Outer Sphere pcb: Status of 400Hz Generator: -------------------------------------------- Outer Sphere pcb: Status of 400Hz Generator: ok MC2: Stabilised DC for Generator 78VDC....79.5VDC: ok 78.2VDC MC2: 400Hz AC-voltage 50VAC....60VAC ok 54.9VAC MC2: 400Hz AC-current 170mA....400mA ok 192mA Startup ============================================================================== Pump Monitor, Voltage and Current: ok ---------------------------------- MC1: Pump Voltage 23V/50Hz is 22VDC....24VDC: ok 22.9VAC MC1: Pump Current 150mA is 140mA....170mA: ok 143mA ============================================================================== CAN Bus Monitor and MC1 <--> MC2 Dialog: ---------------------------------------- Outer Sphere pcb: Internal CAN Bus Monitor: ok Outer Sphere pcb: Communication MC1 with MC2: ok Dialog Sensor pcb ---> Power pcb: ok Dialog Power pcb ---> Sensor pcb: ok ============================================================================== Voltages, monitored by the Power pcb: ------------------------------------- Current of the Shaft Transformer: ok 01.8 A Mains 24VDC Input (12VDC....40VDC): 26.2VDC Generator Prepower (59VDC....61VDC): 60.4VDC System-Voltage Stabilized (14VDC....15VDC): ok 14.3VDC System-Voltage Unstabilized (20.5VDC....29.5VDC): ok 20.1VDC Supply for Encoder (14.5VDC....15.5VDC, LED H9): ok 15.0VDC Follow up Status and Voltage (w1 - w2): ok +002 mV ============================================================================== Actual stored Errors and Warnings: ---------------------------------- Error Log 26 has 001 Entries Error Log 28 has 001 Entries Error Log 32 has 001 Entries Error Log Legende: ------------------ Power-pcb (EL01-EL05) L15.6: stabi. DC for 400Hz off tol. L01.1: no contact with sensor pcb L16.7: 78V for 400Hz off tolerance L02.2: disturbed transformation L17.8: 55V/400Hz off tolerance L03.3: voltage B5.5/8 off tolerance L18.9: gyro current off tolerance L04.4: encoder supply off tolerance L19.10: 24V/50Hz for pump off tol.
- 3. Comission GYRO2 after annual overhaul on BARTOLOMEU DIAS Page 3 of 4 L05.5: voltage B5.1/4 off tolerance L20.11: pump current off tolerance L21.12: invalid temperature sensor Sensor-pcb (EL06-EL08) L22.13: no dialog MC1 and MC2 L06.1: invalid encoder output L23.14: internal CAN-bus disturbed L07.2: internal CAN-bus disturbed L24.15: heating control disturbed L08.3: follow up control disturbed Special Logs (EL25-EL27) Connection pcb (EL09) EL 25, 26, 27: diff. Reset counters L09.1: CAN-bus supply disturbed Warnings (EL28-EL32) Outer Sphere-pcb (EL10-EL24) L28.C1: fan failure L10.1: 80 days low liquid level L29.C2: liquid heating malfunction L11.2: voltage B21.5/8 off tolerance L30.C3: liquid temperature >60° L12.3: 24V pump supply off tolerance L31.C4: liquid level low L13.4: 15V for 33kHz off tolerance L32.C5: supply voltage cut off L14.5: heater supply off tolerance -Read Errorlog with B37.7,8 up- ============================================================================== Encoder test: ------------- Encoder type, 12Bit or 16Bit: 16Bit type Encodervalue, 16bit: 61546 338.0845 ° Following values in Encoder test mode only: Encodervalue, 16bit: 00000 0 ° Number of detected errors: 00000 Encoder position at last error: 00000 0 ° Error difference, 16bit 00000 0 ° Follow up monitoring: --------------------- ROT of the gyro: +00061 4.34484 °/min ROT of the step motor: 000.4 ROT of the encoder: 000.0 ============================================================================== NMEA inputs (GPS and Speed): ---------------------------- Serial Communication ports monitor (Speed on B5.9/10 and GPS on B5.11/12) (max last 20 cycles, latest is right) Count valid Speed strings: 0 0 0 0 0 Count VHW: 0 0 0 0 0 Count VBW: 0 0 0 0 0 Count valid GPS strings: 0 0 0 0 0 Count GLL: 0 0 0 0 0 Count GGA: 0 0 0 0 0 Count VTG: 0 0 0 0 0 Count strings with valid checksum: 0 0 0 0 0 DDU = yes(if DDU = yes then indicated speed values are invalid) Speed type detected value status remarks --------------------------------------------------------------- Pulselog no +000.0kn NMEA VHW no +000.0kn NMEA VTG no +000.0kn NMEA VBW W no +000.0kn NMEA VHW B no +000.0kn CAN-Bus Spd. no +000.0kn Used CMG = 000.0° from VTG at gyro Status of Latitude: ok Used latitude value (decimal): 000.0°
- 4. Comission GYRO2 after annual overhaul on BARTOLOMEU DIAS Page 4 of 4 North speed = +000.0kn based on CMG (1. priority) or Gyro ============================================================================== Errors of the int. CAN-Bus Driver (max last 9 cycles, latest is right): ------------------------------------------------------------------------ Delay until next valid telegram: 0000 0000 0000 0000 0000 0000 Operation status: CAN ok CAN ok CAN ok CAN ok CAN ok CAN ok Number of receive interrupts: 000000 000005 000005 000005 000005 000005 Number of CAN warnings: 000000 000929 000929 000929 000929 000929 Number of passive states: 000000 000000 000000 000000 000000 000000 Number of CAN errors: 000000 000000 000000 000000 000000 000000 Number of receive errors: 000 000 000 000 000 000 Number of transmit errors: 000 000 006 000 000 000 ============================================================================== Configuration Parameters in the FRAM: ------------------------------------- Speed type configuration (B37.4): --------------------------------- Pulselog NMEA - VHW NMEA - VTG NMEA - VBWW NMEA - VBWG x Pulselog direction: open contact at B5.6-7 is astern speed. Heading output configuration (B37.1,2,3): ----------------------------------------- Channel1 B2 Channel2 B3 Output3 B4 NMEA NMEA CBus Speed error correction (SEC) = enabled Rate of turn polarity: clockwise = positiv Gyro connected by CAN-Bus to a DU = yes NMEA outputs B2 and B3 correction = corrected NMEA channel configuration (B37.2): ----------------------------------- NMEA repetition time: 1sec Selected NMEA sentences: HDT + ROT *************************** END OF ONE HARDCOPY **************************