Recomendados

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (13)
Similar a FEAS_Poster_2016_WNCS_Tina
Similar a FEAS_Poster_2016_WNCS_Tina (20)
FEAS_Poster_2016_WNCS_Tina
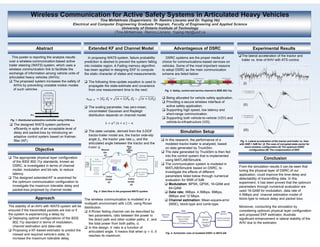
- 1. Abstract This poster is reporting the analysis results over a wireless-communication-based active trailer steering (WATS) system, which uses a wireless communication link to facilitate the exchange of information among vehicle units of articulated heavy vehicles (AHVs). The proposed system increases the safety of AHVs by preventing unstable motion modes of such vehicles. Extended KF and Channel Model Advantageous of DSRC Conclusion In proposing WATS system, failure probability prediction is desired to prevent the system falling into instable region. A Fading memory algorithm has been applied in designing EKF to compute the static character of states and measurements. The following time-update equation is used to propagate the state-estimate and covariance from one measurement time to the next: | , λ , λ The scaling parameter, has zero-mean, uncorrelated Gaussian and Rayleigh distribution depends on channel model. λ The state variable, derived from the 3-DOF tractor-trailer model are, the tractor side-slip angle β , the tractor yaw rate and the articulated angle between the tractor and the trailer ψ. The wireless communication is modeled in a multipath environment with LOS, using Rician distribution. A Rician fading channel can be described by two parameters, ratio between the power in the direct path and other scatter paths, , and the total power from both paths, Ω. In this design, ratio is a function of articulated angle. It means that when ψ 0, reaches its maximum. DSRC systems are the proper media of choice for communications-based services on vehicles. Some of the most important reasons to adopt DSRC as the main communication scheme are listed below: Being allocated for vehicle safety application. Providing a secure wireless interface of active safety application. Supporting high speed, low latency and short-range communication. Supporting both vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I). The stability of an AHV with WATS system will be ensured if the transmitted packets are lost or if the system is experiencing a delay by: Deploying optimal configurations of the IEEE 802.11p standard in terms of modulation, channel estimation and data-rate. Proposing a KF-based estimator to predict the missed and required vehicle’s state, to increase the maximum tolerable delay. The lateral acceleration of the tractor and trailer vs. time of AHV with ATS control. Fig. 5- Lateral acceleration of the tractor and trailer vs. time with SNR = 5dB for: (I) The case of corrupted state-vector for worst wireless configuration (II) The optimum DSRC configuration (III) The compensation of EKF. From the simulation results it can be seen that tuning the physical layer of DSRC of our application, could improve the time delay and detectability of transmitting data. In this experiment, it has been proved that the optimum parameters through numerical evaluation are used 16-QAM for modulation, data rate of 4.5Mbps and channel estimation model of block-type to reduce delay and packet loss. Moreover, conducting the simulation by considering optimum physical layer configuration and proposed EKF estimator, illustrate significant enhancement in lateral stability of the AHV due to the estimator. Objective The appropriate physical layer configuration of the IEEE 802.11p standards, known as DSRC, is investigated in terms of channel model, modulation and bit-rate, to reduce latency. The designed extended-KF is examined for the optimum communication configuration to investigate the maximum tolerable delay and packet-loss proposed by channel model. Fig. 1- Distributed automotive controller using CAN-bus. The designed WATS system performs efficiently in spite of an acceptable level of delay and packet-loss by introducing an adaptive control system based on Kalman filter (KF). Experimental Results In this research, the performance of a modeled tractor-trailer is analyzed, based on data generated by TruckSim. The data generated by TruckSim is then fed into the control system that is implemented using MATLAB/Simulink. The communication system is modeled in MATLAB/Simulink based on DSRC, to investigate the effects of different parameters listed below through numerical evaluation for SNR of 5dB: Modulation: BPSK, QPSK, 16-QAM and 64-QAM. Data rate: 3Mbps, 4.5Mbps, 6Mbps, 9Mbps and 12 Mbps. Channel estimation: Mean-square-error (MSE), block-type and comb-type. Approach Fig. 2- Data flow in the proposed WATS system. Fig. 3- Safety, control and service channel in IEEE 802.11p. Simulation Setup Fig. 4- Schematic view of modeled DSRC in MATLAB. (I) (II) (III)