Basic standard calculator
•Descargar como DOCX, PDF•
14 recomendaciones•8,297 vistas

This document describes the design of a basic standard calculator using an ATMega16 microcontroller. The calculator can perform basic arithmetic operations of addition, subtraction, multiplication and division on two operands using a 4x4 keypad for input and a 2x16 LCD for output display. The microcontroller is programmed to read keypad input, perform calculations and display results on the LCD. It provides code examples for interfacing the keypad and LCD with the microcontroller and implementing the calculator functionality.

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Basic standard calculator
Similar a Basic standard calculator (20)
Más de UVSofts Technologies
Más de UVSofts Technologies (16)
Último
Último (20)
Basic standard calculator
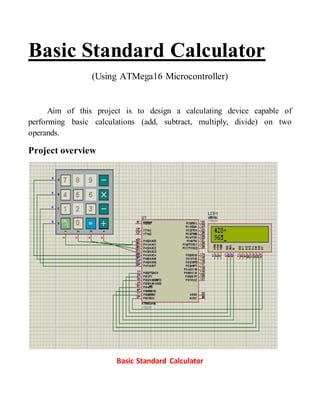
- 1. Basic Standard Calculator (Using ATMega16 Microcontroller) Aim of this project is to design a calculating device capable of performing basic calculations (add, subtract, multiply, divide) on two operands. Project overview Basic Standard Calculator
- 2. Hardware components required 1. ATMega 16 microcontroller 2. Basic calculator keypad 3. 2x16 LCD Keypad and LCD are connected with microcontroller to make an easy man-machine interface to make the calculator capable of performing the desired function. ATMega16 microcontroller: This is the brain of system which is programmed to take input from user through keypad, perform the desired operation and then display the result on the provided 2x16 LCD. Basic calculator keypad: This is a 4x4 (having 4 rows and 4 columns) keypad which is interfaced with microcontroller with its each key assigned a specific no. or operator defined in the program. 2x16 LCD: this is the liquid crystal display module capable of displaying 32 characters in two rows (16 in each row). Microcontroller displays characters on it while taking inputs from user and to display the result to user.
- 3. Interfacing keypad with microcontroller Keyboard Connections to PORTS With matrix keypads 16 keys can function with 8 pins (4 rows and 4 columns) of microcontroller’s either same or different ports as convenient.
- 4. Scanning and identifying the key pressed
- 5. Function to identify a key pressed //connect colum with lower nibble and rows with upper nibble #define key_port PORTA #define key_ddr DDRA #define key_pin PINA unsigned char keypad[4][4]={'7','8','9','/', '4','5','6','*', '1','2','3','-', 'c','0','=','+'}; char takekey() { unsigned char row,colum; char key; key_ddr=0xf0; key_port=0xff; do { key_port&=0x0f; colum=(key_pin&0x0f); }while(colum!=0x0f); do { do { _delay_ms(1); key_port&=0x0f; colum=(key_pin&0x0f); }while(colum==0x0f); _delay_ms(1); key_port&=0x0f;
- 6. colum=(key_pin&0x0f); }while(colum==0x0f); while(1) { key_port=0xef; colum=(key_pin&0x0f); if(colum!=0x0f) { row=0; break; } key_port=0xdf; colum=(key_pin&0x0f); if(colum!=0x0f) { row=1; break; } key_port=0xbf; colum=(key_pin&0x0f); if(colum!=0x0f) { row=2; break; } key_port=0x7f; colum=(key_pin&0x0f); row=3; break; }
- 7. if(colum==0x0e) key=keypad[row][0]; else if(colum==0x0d) key=keypad[row][1]; else if(colum==0x0b) key=keypad[row][2]; else key=keypad[row][3]; return(key); } Interfacing 2x16 LCD with microcontroller (in 4 bit mode) LCD interfacing with atmega 16
- 8. LCD functions in accordance with above figure: #define en PA2 // enable signal #define rw PA1 // read/write signal #define rs PA0 // register select signal void lcd_cmd(unsigned char cmd) { DDRA=0xff; PORTA=0; PORTA=cmd&0xf0; lcd &=~(1<<rs); lcd &=~(1<<rw); lcd |= (1<<en); _delay_ms(1); lcd &=~(1<<en); _delay_ms(1); PORTA=((cmd<<4)&0xf0); lcd &=~(1<<rs); lcd &=~(1<<rw); lcd |= (1<<en); _delay_ms(1); lcd &=~(1<<en); _delay_ms(1); return; } void lcd_data(unsigned char data) { PORTA=(data&0xf0); lcd |=(1<<rs); lcd &=~(1<<rw); lcd |= (1<<en);
- 9. _delay_ms(1); lcd &=~(1<<en); _delay_ms(1); // delay to get things executed PORTA= ((data<<4)&0xf0); lcd |=(1<<rs); lcd &=~(1<<rw); lcd |= (1<<en); _delay_ms(1); lcd &=~(1<<en); return ; } void ini_lcd(void) { _delay_ms(5); lcd_cmd(0x02); _delay_ms(1); lcd_cmd(0x28); _delay_ms(1); lcd_cmd(0x01); // clear LCD _delay_ms(1); lcd_cmd(0x0E); // cursor ON _delay_ms(1); lcd_cmd(0x84); _delay_ms(1); return; }
- 10. Calculator The functioning of calculator s as follows: i. Enter first operand ii. Enter operator iii. Enter second operand iv. Press result key Main program: #include<avr/io.h> #include<util/delay.h> #include"4bitlcd.h" #include"keypad.h" #define key_port PORTA #define key_ddr DDRA #define key_pin PINA void lcd_cmd(unsigned char cmd); void lcd_data(unsigned char data); void ini_lcd(void); void main() { unsigned char ch=0,op=0; long o1=0,o2=0,o3=0,ch1=0; PORTB=0XFF; DDRB=0xff; _delay_ms(5); ini_lcd(); while(1) {
- 11. lcd_data('k'); lcd_cmd(0x01); _delay_ms(20); ch=0; op=0; ch1=0; o1=0; o2=0; o3=0; lcd_cmd(0x80); while((ch!='+')&(ch!='-')&(ch!='*')&(ch!='/')) //get first operand and operator { ch=takekey(); ch1=ch; if((ch!='c')&(ch!='=')&(ch!='+')&(ch!='-')&(ch!='*')&(ch!='/')) { lcd_data(ch); o1=((o1*10)+(ch1-0x30)); } else { op=ch; lcd_data(ch); break; } } ch=0; ch1=0; lcd_cmd(0xc0); while((ch!='+')&(ch!='-')&(ch!='*')&(ch!='/')) //get second operand
- 12. { ch=takekey(); ch1=ch; if((ch!='c')&(ch!='=')&(ch!='+')&(ch!='-')&(ch!='*')&(ch!='/')) { lcd_data(ch); o2=((o2*10)+(ch1-0x30)); } else { lcd_cmd(0x01); break; } } switch(op) //apply operation { case '+': o3=o1+o2; lcd_data('a'); _delay_ms(5); break; case '-': o3=o1-o2; lcd_data('s'); _delay_ms(5); break; case '*': o3=o1*o2;
- 13. lcd_data('m'); _delay_ms(5); break; case '/': o3=o1/o2; lcd_data('d'); _delay_ms(5); break; default: lcd_cmd(0x01); _delay_ms(5); } lcd_cmd(0xc2); lcd_cmd(0x01); lcd_cmd(0xce); while(o3) //print result { lcd_data((o3%10)+0x30); lcd_cmd(0x10); lcd_cmd(0x10); o3=o3/10; } ch=takekey(); lcd_cmd(0x01); _delay_ms(5); } return ; }