PMU-Based Real-Time Damping Control System Software and Hardware Architecture Synthesis and Evaluation

Poster Presentation at the IEEE PES General Meeting. Low-frequency, electromechanically induced, inter- area oscillations are of concern in the continued stability of inter- connected power systems. Wide Area Monitoring, Protection and Control (WAMPAC) systems based on wide-area measurements such as synchrophasor (C37.118) data can be exploited to address the inter-area oscillation problem. This work develops a hardware prototype of a synchrophasor-based oscillation damping control system. A Compact Reconfigurable Input Output (cRIO) con- troller from National Instruments is used to implement the real- time prototype. This paper presents the design process followed for the development of the software architecture. The design method followed a three step process of design proposal, design refinement and finally attempted implementation. The goals of the design, the challenges faced and the refinements necessary are presented. The design implemented is tested and validated on OPAL-RT’s eMEGASIM real-time simulation platform and a brief discussion of the experimental results is included.
Recomendados

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a PMU-Based Real-Time Damping Control System Software and Hardware Architecture Synthesis and Evaluation
Similar a PMU-Based Real-Time Damping Control System Software and Hardware Architecture Synthesis and Evaluation (20)
Más de Luigi Vanfretti
Más de Luigi Vanfretti (20)
Último
Último (20)
PMU-Based Real-Time Damping Control System Software and Hardware Architecture Synthesis and Evaluation
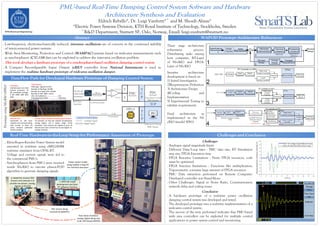
- 1. PMU-based Real-Time Damping Control System Software and Hardware Architecture Synthesis and Evaluation Eldrich Rebello*, Dr. Luigi Vanfretti*~ and M. Shoaib Almas* *Electric Power Systems Division, KTH Royal Institute of Technology, Stockholm, Sweden ~R&D Department, Statnett SF, Oslo, Norway, Email: luigi.vanfretti@statnett.no · Low-frequency, electromechanically induced, interarea oscillations are of concern in the continued stability of interconnected power systems. · Wide Area Monitoring, Protection and Control (WAMPAC) systems based on wide-area measurements such as synchrophasor (C37.118) data can be exploited to address the inter-area oscillation problem. · This work develops a hardware prototype of a synchrophasor-based oscillation damping control system. · A Compact Reconfigurable Input Output (cRIO) controller from National Instruments is used to implement the realtime hardware prototype of wide-area oscillation damper. Abstract Data-Flow Path for Developed Hardware Prototype of Damping Control System Real-Time Hardware-in-the-Loop Setup for Performance Assessment of Prototype Challenges and Conclusion WAPOD Prototype Architecture Refinement 2: Opal-RT 3A: Amplifier 3B: PMUs 4: PDC 6: NI-cRIO(WAPOD) 1: MATLAB model development and Opal- RT software interface 6: BabelFish receives PDC streams and unwraps it to provide raw phasor, analog, digitals to NI-cRIO Power system model being loaded in Opal-RT for real-time execution PDC stream being received by BabelFish Raw values of phasor, analog, digital being sent to NI-cRIO based WAPOD Three stage architecture refinement process. Distributing tasks among host computer, RT-Layer of NI-cRIO and FPGA- Layer of NI-cRIO Iterative architecture development is based on 1) Initial Investigation 2)Requirements Definition 3) Architecture Design 4)Coding and Implementation 5) Experimental Testing to validate requirements Challenges · Analogue signal magnitude limits · Different Data/Loop rates : PMU data rate, RT Simulation step size, FPGA Execution time · FPGA Resource Limitations : Finite FPGA resources, code must be optimised · FPGA function limitations : Functions like multiplication, Trigonometric consume large amount of FPGA resources · PMU Data extraction performed on Remote Computer: Developed controller not Stand-Alone · Other Challenges: Signal to Noise Ratio, Communication network delay and scaling issues Conclusion · A hardware prototype of a real-time power oscillation damping control system was developed and tested. · The developed prototype uses a real-time implementation of a wide-area control system. · The success of the tests performed indicates that PMU-based wide area controllers can be exploited for multiple control applications in power system control and monitoring. Final architecture as implemented in the NI- cRIO (model 9081) · Klein-Rogers-Kundur Power System model executed in real-time using eMEGASIM real-time simulator from OPAL-RT. · Voltage and current signals were fed to the commercial PMUs. · Synchrophasors from PMUs were received inside NI-cRIO to execute phasor-POD algorithm to generate damping signals. PrototypeusingNI-cRIO(9081) RT-Module 1.06 GHz dual-core Intel Celeron processor, 16 GB nonvolatile storage, 2 GB DDR3 800 MHz RAM FPGA Module FPGA type: Spartan-6 LX75 Number of flip-flops: 93,296 Number of 6-input LUTs: 46,648 Number of DSP: 48As 1 slices (18 x 18 multipliers) ....................... 132 Embedded block RAM ................... 3,096 kbits Ethernet Port Connected to the local network and communicating with remote VI (Host VI) using network published shared variables Analog Output Module (Damping Signal Output) 16 channels, 25 kS/s per channel simultaneous analog output, ±10 V output range, 16-bit resolution. Each channel can update at up to 25 kS/s because each channel has its own digital -to- analog converter