
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Présentation robotique
Similar a Présentation robotique (20)
Último
Último (13)
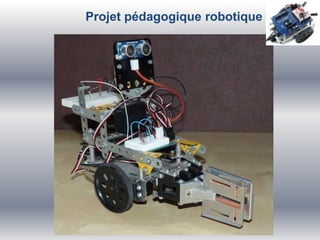
Présentation robotique
- 2. • Conception d'un robot motorisé avec pinces, capteurs pour éviter les obstacles (capteur ultrason motorisé), avec commandes en manuel grâce à une télécommande • Méthode : conception progressive pour parvenir au résultat • 3 éléments essentiels : les aspects mécaniques (en complément du Prototype initial, d'autres pièces ont été intégrées) ; la nature des capteurs (par contact, infrarouge, ultrason) ; la programmation informatique Objectifs
- 3. Le microcontroleur Le microcontroleur constitue le cœur du système. Les informations provenant des capteurs y sont traités. Il fournit en retour les ordres pour actionner le robot ou allumer des états de commande Sortie câble USB ordinateur microcontroleur Plaquette recevant les câbles et composants (capteurs, résistances ..) Câble reliant la plaquette à l'ordinateur Câbles permettant de relier les points de branchement de la plaquette aux ports entrée/sortie du microcontroleur (barrette noire au centre)
- 4. L'interface sur le PC commandes Programmes déjà produits et à envoyer au robot via le câble USB Programme en cours d'écriture
- 5. Premiers pas : test LED (diodes) Plaquette sur le robot ' Robotics with the Boe-Bot – LED1.bs2 ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "LED 1 et 2 éteintes et allumées" DO HIGH 12 PAUSE 500 LOW 12 PAUSE 500 HIGH 13 PAUSE 500 LOW 13 PAUSE 500 LOOP Séquence d’allumage des LED Code informatique résultant Allumer LED sur port 12 durant 500ms Allumer LED sur port 13 durant 500ms éteindre LED sur port 12 durant 500ms éteindre LED sur port 13 durant 500ms
- 6. Déplacement du robot (réglage) DO PULSOUT 12, 750 PAUSE 20 LOOP Le robot se déplace grâce à 2 servomoteurs actionnés par des signaux électriques modulés en largeur d’impulsion. Au préalable, ces servomoteurs doivent être calibrés. Câblage sur la plaquette Réglage consistant à stopper le mouvement Envoi du signal de référence pour calibrer le servomoteur Code informatique correspondant Boucle pour répéter la trame du signal Impulsion de 1,5 ms sur port 12 (1 impulsion = 2 µ sec) Palier bas de 20 ms
- 7. Déplacement du robot (1) ' Robotics with the Boe-Bot – ServoP13Clockwise.bs2 ' Run the servo connected to P13 at full speed clockwise. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Moteur sens horaire!" DO PULSOUT 13, 650 PAUSE 20 LOOP Le moteur tourne dans le sens horaire Le moteur tourne dans le sens horaire inverse Traduction informatique ' Robotics with the Boe-Bot – ServoP13Clockwise.bs2 ' Run the servo connected to P13 at full speed clockwise. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Moteur sens horaire!" DO PULSOUT 13, 850 PAUSE 20 LOOP Traduction informatique On peut donc combiner ces 2 moteurs et les associer chacun à une roue pour faire avancer/reculer le robot, bloquer une des roues, actionner l'autre pour tourner à gauche ou à droite Impulsion de 1,3 ms sur port 13 (1 impulsion = 2 µ sec) Impulsion de 1,7 ms sur port 13 (1 impulsion = 2 µ sec)
- 8. Déplacement du robot (2) Il est possible de moduler la vitesse de déplacement en faisant varier la largeur d'impulsion du signal de 1,3 ms (vitesse maxi sens horaire) à 1,5 ms (vitesse nulle) et de 1,7 ms (sens horaire inverse) à 1,5 ms. Si la temporisation T entre impulsions dépasse 20 ms, le déplacement est saccadé. Donc T=20 ms est le paramétrage optimum On peut déterminer la distance parcourue par le robot. Ici, à la vitesse maxi (23cm/s), la distance est déterminée dans la boucle FOR NEXT (valeur=41 correspondant à 2,22s). Le robot parcourra alors 51 cm. On peut donc prédéterminer un processus automatique : le robot avance d'une distance x, pivote à gauche, recule d'une distance y, pivote à droite et le cycle recommence. FOR counter = 1 TO 41 PULSOUT 13, 850 PULSOUT 12, 650 PAUSE 20 NEXT Impulsion roue gauche Impulsion roue droite
- 9. Déplacement du robot (3) En résumé, on peut donc prédéterminer un processus automatique : le robot avance d'une distance x / pivote à gauche/ recule d'une distance y / pivote à droite et le cycle recommence si on inscrit la séquence dans une boucle. On peut aussi décrire une séquence plus compliquée, dans la mémoire du microcontroleur ! Mais quid de la situation si un obstacle survient !
- 10. Capteurs mécaniques « moustaches » (1) Les 2 moustaches agissent comme de simples interrupteurs mécaniques : un obstacle touché par une moustache ferme le contact et provoque le changement d’état de l’entrée sur laquelle elle est reliée. On peut alors programmer le robot en fonction de l'état de ces contacts : tourner à droite si la moustache gauche est sollicitée. L'inverse pour la moustache droite. Si les 2 moustaches sont sollicitée, le robot recule et assure 2 rotation gauche de 90° pour faire demi tour.
- 11. Capteurs mécaniques « moustaches » (2) ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "test des moustaches" pulse VAR Byte FREQOUT 4,2000,3000 DO IF (IN5=0) AND (IN7=0) THEN 'arrière et demi tour GOSUB arriere GOSUB gauche GOSUB gauche ELSEIF (IN5=0) THEN 'arrière et droite GOSUB arriere GOSUB droite ELSEIF (IN7=0) THEN 'arriere et gauche GOSUB arriere GOSUB gauche ELSE 'continue GOSUB avant ENDIF LOOP Programme principal avant: PULSOUT 13,850 PULSOUT 12,650 PAUSE 20 RETURN gauche: FOR pulse=1 TO 15 PULSOUT 13,650 PULSOUT 12,650 PAUSE 20 NEXT RETURN droite: FOR pulse=1 TO 15 PULSOUT 13,850 PULSOUT 12,850 PAUSE 20 NEXT RETURN arriere: FOR pulse=1 TO 40 PULSOUT 13,650 PULSOUT 12,850 PAUSE 20 NEXT RETURN Sous-programmes Buzzer (départ) Moustaches gauche et droite sollicitées Moustache gauche sollicitée Moustache droite sollicitée Aucune sollicitation (poursuite avance)
- 12. Détection d'obstacle par infrarouge(1) Principe : une source émet de la lumière infrarouge vers un objet et un récepteur analyse les ondes réfléchies pour en déduire la distance à L'objet
- 13. Détection d'obstacle par infrarouge(2) ' {$STAMP BS2} ' {$PBASIC 2.5} irDetectionGauche VAR Bit irDetectionDroite VAR Bit DO FREQOUT 8, 1, 38500 irDetectionGauche = IN9 FREQOUT 2, 1, 38500 irDetectionDroite = IN0 DEBUG HOME, "irDectectionGauche = ", BIN1 irDetectionGauche DEBUG CR , "irDectectionDroite = ", BIN1 irDetectionDroite PAUSE 100 récepteurs émetteurs Émission infrarouge 38,5 Khz port 8 (gauche) Réception détecteur gauche port 9 Émission infrarouge 38,5 Khz port 2 (droit) Réception détecteur droit port 0 Lecture du résultat (0 ou 1 suivant l'état de réception du signal sur chaque récepteur)
- 14. Détection d'obstacle par infrarouge(3) On peut construire le même type de programme qu'avec les capteurs « moustaches » en fonction de l'état des récepteurs infrarouges DO FREQOUT 8, 1, 38500 ' Store IR detection values in irDetectLeft = IN9 ' recueil signal à gauche FREQOUT 2, 1, 38500 irDetectRight = IN0 ' recueil signal à droite 'les 2 détecteurs sont sollicités IF (irDetectLeft = 0) AND (irDetectRight = 0) THEN GOSUB Back_Up ' recul du robot GOSUB Turn_Left ' demi-tour GOSUB Turn_Left ELSEIF (irDetectLeft = 0) THEN ' détecteur gauche sollicité GOSUB Back_Up ' recul GOSUB Turn_Right 'pivote à droite ELSEIF (irDetectRight = 0) THEN ' détecteur droit sollicité GOSUB Back_Up ' recul GOSUB Turn_Left 'pivote à gauche ELSE ' ne détecte rien, le robot avance GOSUB Forward_Pulse ' avance ENDIF ' retour au début LOOP
- 15. Détection ultrason Principe physique Câblage sur port 15 CmConstant CON 2260 cmDistance VAR Word time VAR Word DO PULSOUT 15, 5 PULSIN 15, 1, time cmDistance = cmConstant ** time DEBUG HOME, DEC3 cmDistance, " cm" PAUSE 100 LOOP Émission du signal Calcul de la distance Recueil écho Affichage du résultat Code informatique correspondant
- 16. Télécommande(1) Jusque maintenant le robot était livré à lui même sans contrôle direct de la part de l'utilisateur. Doté de capteurs et d’une séquence prédéterminée, il pouvait évoluer par lui-même de manière autonome. La télécommande est un équipement qui permet de prendre le contrôle en direct du robot.
- 17. Télécommande(2) Le signal envoyé par la télécommande au récepteur infrarouge du robot possède une structure précise qui peut être analysée par le microcontroleur. On peut ainsi savoir à tout moment quelle touche est appuyée
- 18. Et encore bien d'autres capteurs ! Le robot peut aussi être équipé de bien d’autres capteurs : voici quelques exemples Détecteur de CO (monoxyde carbone), CH4 (méthane), C2H5OH (alcool), LPG (propane) Gyroscope et température altimètre GPS Pression atmosphérique Détecteur d’humidité
- 19. Pinces Le robot peut être équipé de pinces à l’avant pour prendre de petits objets. Ces pinces sont actionnées par un servomoteur situé à l’arrière du robot. Servomoteur et pinces sont reliés par une tringle en laiton passant sous la carte électronique. L’usage de la télécommande est fortement recommandé pour utiliser ce dispositif à distance. Servomoteur arrière Tringle de liaison
- 20. Projet final : intégration de l’ensemble des éléments Et maintenant place à la démonstration ! Récepteur infrarouge et télécommande Capteur ultrason monté sur servomoteur pour un balayage grand champ pinces Personnalisation avec pièces de mécanno + ajout seconde plaque d’essais