

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (10)
Destacado
Destacado (12)
Similar a Ts rc
Similar a Ts rc (20)
Ts rc
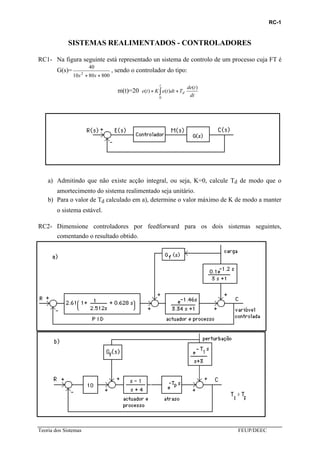
- 1. RC-1 Teoria dos Sistemas FEUP/DEEC SISTEMAS REALIMENTADOS - CONTROLADORES RC1- Na figura seguinte está representado un sistema de controlo de um processo cuja FT é G(s)= 8008010 40 2 ++ ss , sendo o controlador do tipo: m(t)=20 ++ ∫ dt tde TdtteKte d t )( )()( 0 a) Admitindo que não existe acção integral, ou seja, K=0, calcule Td de modo que o amortecimento do sistema realimentado seja unitário. b) Para o valor de Td calculado em a), determine o valor máximo de K de modo a manter o sistema estável. RC2- Dimensione controladores por feedforward para os dois sistemas seguintes, comentando o resultado obtido.
- 2. RC-2 Teoria dos Sistemas FEUP/DEEC RC3- Na figura seguinte está representado um sistema que inclui um controlador do tipo on-off com histerese. Calcule e esboce a saída quando a entrada é um degrau unitário. RC4- a) Que tipo de acção de controlo produz o controlador da figura? b) Em que condições poderia este controlador estabilizar o controlo de posição de uma massa de inércia (F(s)=Js2U(s) )? c) Qual o tipo de resposta temporal obtida? RC5- Para o sistema representado pelo diagrama de blocos seguinte: a) Calcule a resposta c(t) ao degrau unitário na referência quando a resposta do actuador é linear como representada na figura 1.
- 3. RC-3 Teoria dos Sistemas FEUP/DEEC b) Supondo agora um actuador não linear (resposta na figura 2) faça um estudo qualitativo da resposta transitória do sistema, esboçando os sinais m, m', c e e (suponha L = k/2). c) Na situação de b) e supondo o sistema estável, qual o regime permanente. RC6- Considere uma planta com função de transferência Gp= K (s+1)(s+2). Estude a calibração pelos métodos de open-loop estudados de um controlador PID a introduzir na malha de controlo da planta. RC7- A figura é o esquema de um sistema de controlo de posição de um satélite. Suponha que o controlador é do tipo PD. a) Verifique qual a resposta ao degrau sem acção derivativa. Analise qualitativamente a influência da introdução de controlo derivativo. b) Determine o valor da constante de tempo Td, da parte derivativa, de modo a impor ξ = 0.7 . RC8- Projecte um controlador por feedforward para o permutador de calor com o seguinte diagrama de blocos: Discutir o funcionamento do sistema com e sem controlo por feedforward e as limitações de aplicabilidade deste último.
- 4. RC-4 Teoria dos Sistemas FEUP/DEEC RC9- Na figura está representado um sistema de controlo de nível de líquido, num tanque cilíndrico. O caudal de entrada é comandado por um controlador, através da relação qi(t)=0.125[x(t)+⌡⌠ o t x(t)dt], t ≥ 0, sendo x(t) o desnível em metros relativamente ao valor desejado de 1m. Considere que a válvula de saída foi bruscamente aberta, em t=0, estando o sistema em repouso, isto é, h=1m e Qo=0, originando um caudal de saída Qo= 0.01h m3/s. Nestas condições determine: a) a expressão de x em função do tempo b) a altura do líquido no tanque, em regime estacionário, justificando. RC10- a) Aquando do estudo do controlador PI verificou-se que a acção integral era benéfica na eliminação do erro em regime permanente, quando a referência é constante. Contudo, se se der o caso do actuador saturar, essa acção pode ter um efeito detrimental sobre o desempenho do sistema. Como explica esse facto? b) Dimensione um controlador PID para uma planta cuja função de transferência é e-s s de modo que o sistema realimentado apresente uma atenuação de 1 4 de onda.
- 5. RC-5 Teoria dos Sistemas FEUP/DEEC RC11- Calcule a sensibilidade de C R com respeito a |G|, para o sistema indicado: Definição de sensibilidade de T(k) com respeito a k: S T(k) k ^= dlnT(k) dln(k) = dT(k)/T(k) dk/k = dT(k) dk k T(k), G = |G| ejφ RC12- Implemente o com amplificadores operacionais um notch filter com F.T. é G(s)= 40020 1002 2 2 ++ ++ ss ss . RC13- Figura 1 A presença de saturação pode dar origem ao fenómeno de wind-up num sistema de controlo. a) Que condições deverá obedecer Gc(s) na Fig.1 de modo a que não ocorra wind-up ? Quando Gc(s) não satisfaz as condições da alínea anterior, o wind-up pode ser evitado com recurso à montagem alternativa da Fig.2 onde Nc e Dc designam os polinómios numerador e denominador, respectivamente. b) A que condições deverá então obedecer o polinómio A0 para que o wind-up não ocorra? c) Calcule a função de transferência )( )( sE sU na Fig.2, quando não se atinge a saturação. Comente o resultado obtido. v 1 1 -1 -1 0 u v actuador controlador planta y y e G (s) p G (s) c u - u c
- 6. RC-6 Teoria dos Sistemas FEUP/DEEC Figura 2 RC14 - O fenómeno de “wind-up” não é exclusivo da acção integral e pode ocorrer com qualquer controlador instável na presença de saturações. Daí que a montagem da figura: não seja viável na prática quando o polinómio Dc tem raízes no semi-plano direito. Indique então, justificadamente, como modificaria esta montagem de modo a evitar o “wind-up” do controlador. RC15 - Considere o sistema realimentado da figura com um elemento não linear (saturação) conforme indicado: onde PI é um controlador com função de transferência a) Em que consiste o fenómeno de wind-up neste sistema? v 1 1 -1 -1 0 u v actuador planta y y e G (s) p u - - u c D c N c A 0 A 0 A 0 + + Gp(s) y PI R + - -1 -1 1 1Controlador m u Actuador n„o linear Planta
- 7. RC-7 Teoria dos Sistemas FEUP/DEEC b) Sabendo que não tem acesso ao interior dos blocos mas apenas às respectivas entradas e saídas, indique como é que modificaria esta montagem de modo a evitar o fenómeno de wind- up. c) Justifique como é que o fenómeno de wind-up é evitado com a montagem proposta na alínea anterior. d) A montagem proposta na alínea b) continuará a desempenhar o seu papel no caso de Gp(s) ser instável? Porquê? RC16 - Considere o seguinte sistema onde PDé um controlador com função de transferência K (1+Tds). a) Dimensione o controlador PD de forma a colocar os pólos em malha fechada em -1±j1. b) Supondo um degrau unitário aplicado em R determine o tempo que demorará a estabilizar o sistema compensado na alínea a). Justifique a sua resposta. RC17 - Considere o seguinte sistema a) Determine a expressão analítica de y(t), t∈[0,10], supondo que o sistema se encontrava em repouso no instante da aplicação do impulso em r(t). Considere também o actuador como um elemento linear, estático e com ganho unitário. b) Esboce num mesmo gráfico a evolução das grandezas r(t), m(t) e y(t) para t∈[0,10], calculados na alínea anterior. PD 0.5 (s-1)2 R y+ - e m Actuador 1 ys+1 s + - Controlador m u Planta r(t) t 0 5 2
- 8. RC-8 Teoria dos Sistemas FEUP/DEEC RC18 - Considere novamente o sistema do problema anterior onde o actuador é o elemento não linear (saturação) cuja característica está indicada na figura seguinte. a) Determine para este caso a expressão analítica de m(t ) e y(t), t∈[0,10], quando r(t) é o indicado na figura do problema anterior. b) Esboce, num mesmo gráfico, as variáveis r(t), e(t), m(t) e y(t), t∈[0,10], nas condições da alínea anterior. c) Explique em que consistiu o fenómeno de wind-up que ocorreu neste caso. d) Sem alterar o bloco do controlador PI, indique justificadamente como modificaria a montagem de modo a evitar o wind-up referido na alínea anterior. RC19 - Considere o sistema da figura onde Gc(s) e Gp(s) são funções de transferência racionais próprias. )(sGc )(sGp R(s) D(s) Y(s) N(s) Pretende-se dimensionar o compensador Gc(s) de modo a que )( )( sR sY tenha uma largura de banda ωB. Ao mesmo tempo pretende-se insensibilizar o sistema ao ruído de medida N(s) que possa ocorrer na banda (0,ωB), ou seja, impôr ),0(para0 )( )( Bωω ω ω ∈≈ jN jY . Diga como poderia dimensionar um tal compensador. Justifique a sua resposta. RC20 - Para um sistema linear de fase mínima com realimentação unitária negativa, e com função de transferência em anel aberto G(s), G(s) racional, é pedida a seguinte especificação: | G(jw)| ≥ 30 dB para w ≤ a | G(jw)| ≤ -30 dB para w ≥ 10a Comente, justificadamente, a viabilidade de uma tal especificação. -1 -1 1 1 m u um
- 9. RC-9 Teoria dos Sistemas FEUP/DEEC RC21 - Considere o sistema s s 1+ 1 1 -1 -1 0 1 r me yu PI Actuador Planta onde ∈ >< = ]4,0[para2 4ou0para0 )( t tt tr a) Determine a expressão analítica de m(t) e y(t) para ]10,0[∈t . b) Terá neste caso ocorrido o fenómeno de “wind-up” ? Justifique a sua resposta com base no resultado obtido na alínea anterior. RC22 - Considere o sistema: s s 1+ 1 1 -1 -1 0 1 r me yu PI Actuador Planta onde r(t) é um degrau, de amplitude 5, aplicado no instante t = 0. a) Determine a expressão analítica de m(t) e y(t) para t ∈ [0, 6]. b) Terá ocorrido neste caso o fenómeno de wind-up? Porquê? RC23 - Considere o sistema realimentado da figura 1, com Gc(s) = 1 e T = 0. Os respectivos traçados de Bode nestas condições estão representados nas figuras 2.1 e 2.2. )(sGc )(sGp sT e− Figura 1 a) Determine a Margem de Fase e a Margem de Ganho (em decibeis). b) Determine as constantes de erro de velocidade e de posição. c) c.1) Quantos pólos e quantos zeros terá Gp(s) ? Justifique. c.2) Calcule-os. Justifique o seu procedimento. d) Nas condições do problema, calcule o conjunto dos valores de T, T > 0, para os quais o sistema da figura 1 é estável. Justifique a sua resposta.