
Recomendados
Más contenido relacionado
Similar a Discrete Time Signal Processing Concepts Explained
Similar a Discrete Time Signal Processing Concepts Explained (20)
Más de shannlevia123
Último
Último (20)
Discrete Time Signal Processing Concepts Explained
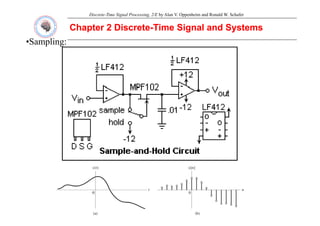
- 1. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems •Sampling:
- 2. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Application: Radar Detection Application: Radar Detection Application: Radar Detection Application: Radar Detection
- 3. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Application: Sonar Detection Application: Sonar Detection Application: Sonar Detection Application: Sonar Detection
- 4. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Radar Systems
- 5. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Echo Cancellation
- 6. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Application: Transmission of Speech Signals Application: Transmission of Speech Signals
- 7. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Xa(t): Analog signal X[n]: discrete signal Cos(ωn)= cos(Ωt)|t=nT ΩT ω=ΩT ω: frequency of discrete signal Ω: frequency of analog signal q y g g T: sampling interval 1/T=f = sampling frequency
- 8. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Figure 2.2 (a) Segment of a continuous-time speech signal xa(t ). (b) Sequence of samples x[n] = xa(nT ) obtained g ( ) g p g a( ) ( ) q p [ ] a( ) from the signal in part (a) with T = 125 µs.
- 9. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.1.1 Basic Sequences and Sequence Operations Delayed Sequence: y[n] = x[n-n0], where n0 is a integer representing the delay ⎧ 0 0 Unit sample sequence (Dirac delta function): ⎩ ⎨ ⎧ = ≠ = δ 0 n , 1 0 n , 0 ] n [ Expression of a sequence using delta function: Expression of a sequence using delta function: Expression of a sequence using delta function: Expression of a sequence using delta function: ∑ ∞ δ ] k [ ] k [ ] [ ∑ −∞ = − δ = k ] k n [ ] k [ x ] n [ x
- 10. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Unit Step sequence: The relation between unit function and delta function The relation between unit function and delta function ] [ ] 1 [ ] [ ] [ ] 1 [ ] 1 [ ] [ ∞ − + + − + = + − + + + −∞ + −∞ = n δ n δ n δ n δ n δ δ δ K K ∑ ∑ −∞ = ∞ −∞ = δ = − ⋅ δ = ⎩ ⎨ ⎧ < ≥ = n k k ] k [ ] k n [ u ] k [ 0 n , 0 0 n , 1 ] n [ u equal) are equations two these n, number finite any (for If n-k ≥ 0, u[n-k]=1, then u[n-k]=1 exists when n≥k Besides ] 1 n [ u ] n [ u ] n [ − − = δ Besides, ] 1 n [ u ] n [ u ] n [ = δ Impulse sequence: Exponential and sinusoidal sequence (General form):
- 11. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Sinusoidal sequences: ) n cos( A ] n [ x 0 φ + ω = , for all n ⎧ ≥ α 0 n A n Recall the exponential sequence ⎩ ⎨ ⎧ < ≥ α = 0 n , 0 0 n , A ] n [ x if 0 j e | | ω α = α And φ j e A A | | 1 = then ( ) ] [ 2 1 ] [ ] [ 2 1 0 0 2 1 n ω j φ j n ω j φ j e Ae e Ae n x n x − − + = + = , if e | | α α And e A A | | 1 , then | | | | ] [ ) ( 1 1 0 e α e A α A n x n ω j n φ j n = = ) sin( | | | | ) cos( | | | | | | | | 0 0 ) ( 0 φ n ω α A j φ n ω α A e α A n n φ n ω j n + ⋅ + + ⋅ = ⋅ = + Especially,| α| =1 ) i ( | | ) ( | | ] [ A j A Frequency phase ) sin( | | ) cos( | | ] [ 0 0 1 φ n ω A j φ n ω A n x + + + = Complex exponential sequence ) sin( ) cos( ] [ 0 0 1 2 2 0 φ n ω A j φ n ω A e α e A α A n x α n ω j n φ j n + − + = = = = − − −
- 12. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems In discrete signals, time index n is an integer which results in many important differences from continuous-time sequences differences from continuous time sequences. Frequency periodicity: n j n 2 j n j n ) 2 ( j 0 0 0 Ae e Ae Ae ] n [ x ω π ω π + ω = = = ] n cos[ A ] n ) r 2 cos[( A ] n [ x φ + ω = φ + π + ω = ] n cos[ A ] n ) r 2 cos[( A ] n [ x 0 0 φ + ω = φ + π + ω = Time periodicity: Time periodicity holds only when the following relation exits, p y y g , ] N n [ x ] n [ x + = For sinusoid signals, Acos(ω0n+φ)=Acos(ω0n+ω0N+φ) ω0N=2πk
- 13. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems ω=ΩT Ω↑ then ω↑ Example 2.1 In continuous signals, signals with higher frequency usually have shorter repetition period but this doesn’t hold in have shorter repetition period, but this doesn t hold in discrete signals. ), 4 / cos( ] [ 1 n n x π = N=8 ), 8 / 3 cos( ] [ 2 n n x π = N=16
- 14. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.2 Discrete 2.2 Discrete- -Time Systems Time Systems x[n] y[n] { } ⋅ T ]} n [ x { T ] n [ y = Example 2 2 The ideal delay system Example 2.2 The ideal delay system y[n] = x[n-nd], where n is a fixed positive integer called the delay of the system where nd is a fixed positive integer called the delay of the system.
- 15. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.3 Moving Average The general moving average system is defined by the equation { } 1 ] [ 1 1 ] [ 2 1 2 1 k n x M M n y M M k = − + + = ∑ − = { } ] [ ] [ ] 1 [ ] [ 1 1 2 1 1 2 1 M n x n x M n x M n x M M − + + + + − + + + + + = L L Figure 2.7 Sequence values involved in computing a moving average with M1 = 0 and M2 = 5.
- 16. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.2.1 2.2.1 Memoryless Memoryless Systems Systems A system is referred to as memoryless if the output y[n] at every value of n depends only on the input x[n] at the same value of n Example 2.4 y[n] = (x[n])2 for all value of n depends only on the input x[n] at the same value of n. y[n] = (x[n]) , for all value of n 2.2.2 Linear Systems 2.2.2 Linear Systems The class of linear systems is defined by the principle of superposition. If y1[n] Additivity property and y2[n] are the responses of a system when x1[n] and x2[n] are the respective inputs, then the system is linear if and only if ]} [ { ]} [ { ]} [ ] [ { n x T n x T n x n x T + + Additivity property Scaling or Homogeneity property ]} [ { ]} [ { ]} [ ] [ { 2 1 2 1 n x T n x T n x n x T + = + ] [ ]} [ { ]} [ { n ay n x aT n ax T = = property where a is an arbitrary constant. The first property is the additivity property, and the second is the homogeneity or scaling property. These two properties together comprise the principle of superposition stated as comprise the principle of superposition, stated as ]} [ { ]} [ { ]} [ ] [ { 2 1 2 1 n x bT n x aT n bx n ax T + = +
- 17. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems For a linear system with arbitrary constants a and b, the expression of generalized to the superposition of many inputs. g y ] n [ x a ] n [ x k k k ∑ = Output of a linear system will be General form: ] n [ y b ] n [ y k k k ∑ = p y } ] n [ x a { T ] n [ y b m k k k m m ∑ ∑ = E l 2 5 Th l t t n Example 2.5 The accumulator system ∑ −∞ = = k ] k [ x ] n [ y Is linear? Let x3 [n] = ax1[n]+bx2[n] and check the output is y3[n] = ay1[n]+by2[n] ? ]) k [ bx ] k [ ax ( ] k [ x ] n [ y n n n k n k 2 1 3 3 + = = ∑ ∑ −∞ = −∞ = ] n [ by ] n [ ay ] k [ x b ] k [ x a 2 1 k k 2 1 + = + = ∑ ∑ −∞ = −∞ = Linear
- 18. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.6 A Nonlinear System Consider the system defined by |). ] [ (| log ] [ 10 n x n w = This system is not linear. For x1[n]=1 and x2[n] = 10, then . 1 ) 10 ( log ) 1 ( log ) 11 ( log ) 10 1 ( log 10 10 10 10 = + ≠ = + Also, we have x2[n] = 10 .x1[n], but 1 ) 10 1 ( l ] [ 0 ) 1 ( log ] [ 10 1 ≠ = = n w . 1 ) 10 1 ( log ] [ 10 2 = ⋅ = n w
- 19. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.2.3 Time 2.2.3 Time- -Invariant Systems Invariant Systems A time-invariant system (equivalently often referred to as a shift-invariant system) is one for with a time shift or delay of the input sequence causes a corresponding is one for with a time shift or delay of the input sequence causes a corresponding shift in the output sequence. Specifically, suppose that a system transforms the input sequence with values x[n] into the output sequence with values y[n]. The system is said to be time-invariant if for all n0 the input sequence with values x1[n] system is said to be time invariant if for all n0 the input sequence with values x1[n] = x[n-n0] produces the output sequence with values y1[n] = y[n-n0]. Example 2.7 The Accumulator as a Time –Invariant System Consider the accumulator from Example 2.5. We define x1[n]= x[n-n0]. To show time invariance, we solve for both y[n-n0] and y1[n] and compare them to see whether they are equal. Therefore, setting a system T{.}, we have y q g y { } . ] [ ] [ ]} [ { ] [ ]} [ { ] [ 0 1 1 1 ∑ ∑ −∞ = −∞ = − = = = = n k n k n k x k x n x T n y and n x T n y , ] [ ] [ 0 0 ∑ − −∞ = + = = − n 0 n n k then n k k' setting and k x n n y g Considerin . ] ' [ ] [ ' 0 0 ∑ −∞ = − = − n k n k x n n y
- 20. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.8 The Compressor System Th t d fi d b th l ti The system defined by the relation with M a positive integer, is called a compressor. Specifically, it discards (M-1) samples out of M; i e it creates the output sequence by selecting every Mth . n - Mn x n y ∞ < < ∞ = ], [ ] [ samples out of M; i.e., it creates the output sequence by selecting every Mth sample. The system is not time-invariant, the output of the system when the input is x1[n] must be equal to y[n-n0]. The output y1[n] that results from the input x1[n] can be directly computed to be input x1[n] can be directly computed to be )] ( [ ] [ ] [ ]. [ ] [ 0 0 0 1 n n M x n n y n y condition, delay output to Compared n Mn x n y have we condition, delay input For 2 − = − = − = Time-invariant is not compressible. ]. [n y1 ≠
- 21. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.2.4 Causality 2.2.4 Causality A system is causal if for every choice of n the output sequence value at the A system is causal if, for every choice of n0, the output sequence value at the index n = n0 depends only on the input sequence values for n ≤ n0. For example, Example 2.4 is causal if –M1 ≥ 0 and M2 ≥ 0. Example 2.9 The Forward and Backward Difference Systems The forward difference system is defined by the relation y y y[n] = x[n+1] – x[n]. Obviously y[n] depends on x[n+1]; therefore, the system is noncausal. However, the backward difference system, defined by y[n] = x[n] – x[n-1] is causal.
- 22. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.2.5 Stability 2.2.5 Stability A system is stable in the bounded-input bounded-output (BIBO) sense if and only if every bounded input sequence produces a bounded output sequence The only if every bounded input sequence produces a bounded output sequence. The input x[n] is bounded if there exits a fixed positive finite value Bx such that |x[n]| ≦Bx ≦ ∞ for all n. Stability requires that for every bounded input there exists a fixed positive finite Stability requires that for every bounded input there exists a fixed positive finite value By such that |y[n]| ≦By ≦ ∞ for all n. Example 2.10 Testing for Stability or Instability (i) Ex 2.4. For |x[n]| ≦Bx , then |y[n]| = |x[n]|2≦ Bx2 (ii) E 2 6 F [ ] 0 [ ] l (| [ ]|) (ii) Ex 2.6. For x[n] = 0, y[n] = log10(|x[n]|) = - ∞ (iii) Ex. 2.5. For x[n] = u[n] with Bx =1, ∑ ⎨ ⎧ < n 0 n k , 0 ] [ ] [ Ans: (i) stable ∑ −∞ = ⎩ ⎨ ≥ + = = k 0 n n k u n y , 1 ] [ ] [ Ans: (i) stable (ii) not stable (iii) not stable
- 23. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.3 Linear Time 2.3 Linear Time- -Invariant systems Invariant systems A particularly important class of systems consists of those that are linear and time invariant. This class of systems has significant signal-processing applications. Let hk[n] be the response of the system to δ[n-k], an impulse occurring at e k[ ] be e espo se o e sys e o δ[ ], a pu se occu g a n=k. ∑ ∞ −∞ = − δ = k ]} k n [ ] k [ x { T ] n [ y Time invariant ∑ ∑ ∑ ∞ −∞ = ∞ −∞ = ∞ −∞ = = − = − δ = k k k k ] n [ h ] k [ x ] k n [ h ] k [ x ]} k n [ { T ] k [ x h[n] with k delayed input Linearity h[n] with k delayed input (T{.} is LTI system) Define: Convolution sum: Convolution sum: y[n] = x[n] y[n] = x[n] ∗ ∗ h[n] h[n]
- 24. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems y[n] = x[n] y[n] = x[n] ∗ ∗ h[n] h[n] Sum Sum ∑ ∞ −∞ = − ⋅ = k ] k n [ h ] k [ x ] n [ y volution volution of Conv of Conv example example An e An e Figure 2.8 Representation of the output of an LTI system as the superposition of responses to system as the superposition of responses to individual samples of the input.
- 25. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems It is worthy to note that the term h[n-k] in convolution sum also can be represented as h[-(k-n)]. Therefore, ∞ ∞ ( ) ∑ ∑ ∞ ∞ − ∞ −∞ = − − ⋅ = − ⋅ = )] n k ( [ h ] k [ x ] k n [ h ] k [ x ] n [ y k h[k] h[k] h[ h[- -k] = h[0 k] = h[0- -k] k] h[ h[ k] h[0 k] h[0 k] k] h[n h[n- -k] = h[ k] = h[- -(k (k- -n)] n)] Figure 2.9 Forming the sequence h[n − k]. (a) The sequence h[k] as a function of k. (b) The sequence h[−k] as a function of k. (c) The sequence h[n − k] = h[ − (k − n)] as a function of k for n = 4.
- 26. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.11 Analytical Evaluation of Convolution sum Example 2.11 Analytical Evaluation of Convolution sum Consider a system with impulse response y p p ⎩ ⎨ ⎧ − ≤ ≤ = − − = otherwise , 0 1 N n 0 , 1 ] N n [ u ] n [ u ] n [ h ⎩ 0 N-1 The input is ] n [ u a ] n [ x n = ∞ ∑ ∞ ∞ − − − ⋅ = )] n k ( [ h ] k [ x ] n [ y
- 27. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Ans: Figure 2.10 Sequence involved in computing a discrete convolution. (a)–(c) The sequences x[k] and h[n− k] as a function of k for different values of n. (Only nonzero samples are shown.) (d) Corresponding output sequence as a function of n.
- 28. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems
- 29. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer 2.4 Properties of Linear Time 2.4 Properties of Linear Time- -Invariant Systems Invariant Systems 1 Commutative: With m = n-k 1. Commutative: 2. Distributive:
- 30. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Bounded Input is not guaranteed for Bounded Output (The requirement for a stable system) ∞ (The requirement for a stable system) Linear time-invariant systems are stable if and only if the impulse response is absolutely summable, i.e., if ∑ ∞ −∞ = ∞ < = k | ] k [ h | S Sufficient Sufficient condition for stability condition for stability ∑ ∑ ∞ −∞ = ∞ −∞ = − ≤ − = k k | ] k n [ x || ] k [ h | ] k n [ x ] k [ h | ] n [ y | B | ] n [ x | ≤ If x[n] is bounded so that x B | ] n [ x | ≤ If x[n] is bounded, so that ∑ ∞ ≤ x | ] k [ h | B | ] n [ y | Consider: Th [ ] i l l −∞ = k ⎪ ⎨ ⎧ ≠ − = 0 ] n [ h , | ] n [ h | ] n [ h ] n [ x * The sequence x[n] is clearly bounded to unity. However, the value of the output at n=0 is: ⎪ ⎩ ⎨ = − = 0 ] n [ h , 0 | ] n [ h | ] n [ x ∑ ∑ ∞ ∞ 2 S | ] k [ h | ] k [ h ] k [ ] 0 [ n=0 is: Bounded input produce unbounded output Bounded input produce unbounded output ∑ ∑ −∞ = −∞ = = = − = k k S | ] k [ h | | ] [ | ] k [ h ] k [ x ] 0 [ y
- 31. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Some LTI systems: Some LTI systems:
- 32. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer The expression of equivalent LTI systems (example 1) noncausal noncausal causal causal Figure 2.12 (a) Cascade combination of two LTI systems. (b) Equivalent cascade. (c) ] 1 [ ]) [ ] 1 [ ( ] [ h δ δ δ y ( ) q ( ) Single equivalent system. ]) n [ ] 1 n [ ( ] 1 n [ ] 1 n [ ]) n [ ] 1 n [ ( ] n [ h δ − + δ ∗ − δ = − δ ∗ δ − + δ = ] 1 n [ ] n [ − δ − δ =
- 33. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer The expression of equivalent LTI systems (example 2) Backward difference is an inverse system of accumulator. Backward difference is an inverse system of accumulator. How about convolute the accumulator with forward difference system? How about convolute the accumulator with forward difference system?
- 34. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.5 Linear constant 2.5 Linear constant- -coefficient Differenece Equations coefficient Differenece Equations Nth order linear constant coefficient difference equation: Nth-order linear constant-coefficient difference equation: ∑ ∑ = = − = − N 0 k M 0 m m k ] m n [ x b ] k n [ y a ∑ ∑ ∞ − ⋅ = = = 1 n 1 ], k n [ h ] k [ x ] n [ h * ] n [ x ] k [ x ] n [ y Example 2.12 Example 2.12 Consider: 0 k 0 m ∑ ∑ ∑ −∞ = ∞ − ∞ − δ = n k 1 1 1 ] k [ ] n [ h where ], k n [ h ] k [ x ] n [ h ] n [ x ] k [ x ] n [ y Consider: ∞ = k Input y[n] into a inverse system Y[n] Inverse system ? ] 1 n [ ] n [ ] n [ h2 − δ − δ = Inverse system: ] n [ h * ] n [ y ] n [ x ] n [ h * ] n [ y ] n [ x 2 =
- 35. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems ∑ = n k ] k [ x ] n [ y Y[n] X[n] −∞ = k ∑ − = − 1 n ] k [ x ] 1 n [ y One-sample Y[n] [ ] ∑ −∞ = k ] [ ] [ y ∑ −1 n One-sample delay Y[n-1] ∑ −∞ = + = k ] k [ x ] n [ x ] n [ y Y[n 1] ] 1 n [ y ] n [ x ] n [ y − + = ] n [ x ] 1 n [ y ] n [ y = − −
- 36. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.13 Difference equation representation of the moving Example 2.13 Difference equation representation of the moving- -average system average system ]) 1 M n [ u ] n [ u ( ) 1 M ( 1 ] n [ h 2 2 − − − + = Consider causal moving-average system with M1=0, ∑ − = = 2 M ] k n [ x ) 1 M ( 1 ] n [ h * ] n [ x ] n [ y ∑ = + 0 k 2 ) 1 M ( ]} n [ u * ]) 1 M n [ ] n [ {( ) 1 M ( 1 ] n [ h 2 2 − − δ − δ + = ] n [ u * ]) 1 M n [ x ] n [ x ( ) 1 M ( 1 ] n [ h * ] n [ x ] n [ y 2 2 − − − + = =
- 37. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer LTI system can be expressed as a recurrent form
- 38. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.6 Frequency Domain Representation of Discrete 2.6 Frequency Domain Representation of Discrete- -Time Signal and Time Signal and Systems Systems 2.6.1 Eigen functions for Linear Time 2.6.1 Eigen functions for Linear Time- -Invariant Systems Invariant Systems Input sequence x[n] = ejwn is a set of eigen-function to represent the frequency response of h[n] e ] k [ h ] k n [ x ] k [ h ] n [ x * ] n [ h ] n [ y ) k n ( j ∑ ∑ ∞ − ω ∞ = = = } e ] k [ h { e e ] k [ h ] k n [ x ] k [ h ] n [ x * ] n [ h ] n [ y k j n j k ) ( j k ∑ ∑ ∑ ∞ ω − ω −∞ = −∞ = = = − ⋅ = = } e ] k [ h { e k ∑ −∞ = = ∑ ∞ ω − ω = k j j e ] k [ h ) e ( H If we define , then n j j e ) e ( H ] n [ y ω ω = ∑ −∞ = k ] [ ) ( If we define , t e ) ( ] [ y Eigenfunction j j j ) e ( H j j j j | ) ( H | ) ( H ω ∠ ω ω Polar Polar form form ) e ( jH ) e ( H ) e ( H j I j R j ω ω ω + = ) e ( H j j j j e | ) e ( H | ) e ( H ∠ ω ω = form form
- 39. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.14 Frequency response of the ideal delay system Example 2.14 Frequency response of the ideal delay system Consider a ideal delay system defined by y[n]= x[n-nd] , where nd is a fixed integer. If we consider x[n]=ejωn as input to this system, then we have y[n] = ejω(n-nd) = e-jωnd ejωn. The frequency response of the ideal delay is therefore H(ejω) = e-jωnd An alternative way to obtain the frequency response is to compute the H(ejω) i F i t f using Fourier transform ∑ ∞ ∞ − ω − ω − δ = n j d j e ] n n [ ) e ( H From the Euler relation the real and imaginary parts are From the Euler relation, the real and imaginary parts are ) n cos( ) e ( H d j R ω = ω Polar form Polar form j | ) e ( H | = ω 1 ) n sin( ) e ( H d j I ω = ω d j n ) e ( H | ) ( | ω − = ∠ ω
- 40. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems * *For any input signal, x[n], if the input signal can be represented as n j k k n e ] n [ x ω ∑α = Then from the principle of superposition the corresponding output of a Then, from the principle of superposition, the corresponding output of a linear time-invariant system is n j j k k k e ) e ( H ] n [ y ω ω ∑α = k k ) ( ] [ y ∑ Thus if we can find a representation of x[n] as a superposition of ocmplex Thus, if we can find a representation of x[n] as a superposition of ocmplex exponential sequences, then we can find the output as aforementioned equation if we know the frequency response of the system.
- 41. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.15 Sinusoidal response of LTI system Example 2.15 Sinusoidal response of LTI system Since it is simple to express a sinusoid as a linear combination of complex n j j n j j e e A e e A ) n cos( A ] n [ x 0 0 2 2 0 ω − φ − ω φ + = φ + ω = exponentials, let us consider a sinusoidal input X1[n] X2[n] The responses to x1[n] and x2[n] are y1[n] and y2[n]. A n j j n j e e A ) e ( H ] n [ y 0 0 2 1 ω φ ω = n j j n j e e A ) e ( H ] n [ y 0 0 2 2 ω − φ − ω − = ) ( ] [ y 2 ] e e ) e ( H e e ) e ( H [ A ] n [ y ] n [ y ] n [ y n j j n j n j j n j 0 0 0 0 2 2 1 ω − φ − ω − ω φ ω + = + = If h[ ] i l ill h l t th t H( j 0) H*( j 0) hi h i th t If h[n] is real, we will show later that H(ejω0)=H*(e-jω0) which gives that ) n cos( | ) e ( H | A ] n [ y n j θ + φ + ω = ω 0 0 , where ) e ( H j 0 ω ∠ = θ
- 42. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems An important characteristic of discrete-time linear time-invariant systems is of its periodicity of the variable ω with period 2π. Consider ∑ ∑ ∞ −∞ = ω − ∞ −∞ = π + ω − π + ω = = n n j n n ) 2 ( j n ) 2 ( j e ] n [ h e ] n [ h ) e ( H n j n 2 j n j n ) 2 ( j e e e e ω − π − ω − π + ω − = = ) ( ) ( j n ) 2 ( j ω π + ω ) e ( H ) e ( H j n ) 2 ( j ω π + ω = Th f bt i H( Th f bt i H( j jω ω) i i di ith i d ) i i di ith i d 2 2 Therefore, we obtain H(e Therefore, we obtain H(ej jω ω) is periodic with period ) is periodic with period 2 2π π. .
- 43. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Ideal Highpass filter Ideal Highpass filter Ideal lowpass filter Ideal lowpass filter Ideal Highpass filter Ideal Highpass filter Ideal lowpass filter Ideal lowpass filter Ideal bandpass filter Ideal bandpass filter Figure. 2. 17 Figure. 2. 17 Figure. 2. 18 Figure. 2. 18
- 44. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.16 Frequency response of the moving Example 2.16 Frequency response of the moving- -averaging system averaging system ⎧ ≤ ≤ M n M 1 2 M 1 ⎩ ⎨ ⎧ ≤ ≤ − = + + otherwise , 0 M n M , ] n [ h 2 1 1 M M 1 2 1 ∑ − = ω − ω + + = 2 1 M M n n j 2 1 j e 1 M M 1 ) e ( H Frequency response Frequency response q y p q y p ) 1 ( 2 1 1 M j M j e e + − ω ω ) ( 2 1 2 1 1 1 1 ) ( j j j j e e e M M e H − − − + + = ω ω 2 / ) ( 2 / 2 / 2 / ) 1 ( 2 / ) 1 ( 2 1 1 2 2 1 2 1 1 1 M M j j j M M j M M j e e e e e M M − − − + + − + + − − + + = ω ω ω ω ω 2 / ) ( 2 1 2 1 1 2 ) 2 / i ( ] 2 / ) 1 ( sin[ 1 1 1 M M j e M M M M e e M M − − + + = + + ω ω 2 1 ) 2 / sin( 1 M M + + ω
- 45. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2 / ) M M ( j 2 1 j 1 2 e ) 2 / sin( ] 2 / ) 1 M M ( sin[ 1 M M 1 ) e ( H − ω − ω ω + + ω + + = 2 1 ) 2 / sin( 1 M M ω + + Figure 2.19 (a) Magnitude and (b) phase of the frequency response Figure 2.19 (a) Magnitude and (b) phase of the frequency response of the moving of the moving- -average system for the case M1=0 and M2=4. average system for the case M1=0 and M2=4.
- 46. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.6.2 Suddenly Applied Complex Exponential Inputs 2.6.2 Suddenly Applied Complex Exponential Inputs In Sec 2 6 1 we have seen that complex inputs of the form e jωn for -∞<n<∞ In Sec. 2.6.1, we have seen that complex inputs of the form e jωn for ∞<n<∞ produces outputs of the form H(ejω)ejωn for causal LTI systems. If we change the complex sinusoidal inputs as x[n] = ejωn u[n], we can have ⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ≥ ⎟ ⎟ ⎟ ⎞ ⎜ ⎜ ⎜ ⎛ < = − ⋅ = = ω ω − ∞ ∞ = ∑ ∑ 0 n for , e e k h 0 n for , k n x k h n h n x n y n j n k j k ] [ 0 ] [ ] [ ] [ * ] [ ] [ ⎪ ⎩ ⎟ ⎠ ⎜ ⎝ = −∞ = ∑ k k 0 ( ) [ ] [ ] [ ] eq. 2.126 j k j n j k j n y n h k e e h k e e ω ω ω ω ∞ ∞ − − ⎛ ⎞ ⎛ ⎞ = − ⎜ ⎟ ⎜ ⎟ ∑ ∑ For n≧0, it becomes ( ) [ ] [ ] [ ] 0 1 eq. 2.126 k k n y n h k e e h k e e = = + ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ∑ ∑ ( ) ( ) [ ] eq. 2.127 j j n j k j n H e e h k e e ω ω ω ω ∞ − ⎛ ⎞ = −⎜ ⎟ ⎝ ⎠ ∑ ( ) ( ) [ ] 1 k n = + ⎜ ⎟ ⎝ ⎠ ∑ ] [n y response state - Steady ss ] [n y response Transient t No transient response for n>M-1, if h[n] has finite length (i.e, FIR filter) with M points.
- 47. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems h[n] has finite length h[ ] h i fi it l th Figure 2.20 Illustration of a real part of suddenly applied complex exponential input with (a) FIR and (b) IIR. h[n] has infinite length
- 48. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.7 Representation of Sequences by Fourier Transforms 2.7 Representation of Sequences by Fourier Transforms Fourier transform pair (Discrete nonperiodic signal): Fourier transform pair (Discrete nonperiodic signal): Fourier transform pair (Discrete nonperiodic signal): Fourier transform pair (Discrete nonperiodic signal): ω π = ω π π − ω ∫ d e ) e ( X 2 1 ] n [ x n j j ∑ ∞ −∞ = ω − ω = n n j j e ] n [ x ) e ( X Discrete Fourier Transform (DTFT) Discrete Fourier Transform (DTFT) −∞ = n ) e ( jH ) e ( H ) e ( H j I j R j ω ω ω + = I R ) e ( H j j j j e | ) e ( H | ) e ( H ω ∠ ω ω =
- 49. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.7 Representation of Sequences by Fourier Transforms 2.7 Representation of Sequences by Fourier Transforms Fourier representation pair of discrete Fourier representation pair of discrete- -time signals. time signals. p p p p g g ω π = ω π π − ω ∫ d e ) e ( X ] n [ x n j j 2 1 ∑ ∞ ω − ω n j j ] [ ) ( X ∑ ∞ − ω − ω = n j j e ] n [ x ) e ( X j The Fourier transform X(ejω) can be presented in ) e ( X ) e ( X ) e ( X j I j R j ω ω ω + = jω Rectangular form: Rectangular form: M it d S t Phase Spectrum ) e ( X j j j j e | ) e ( X | ) e ( X ω ∠ ω ω = Polar form: Polar form: Magnitude Spectrum p
- 50. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems ∫− n j j d e e X ) ( 2 1 ω π π π ω ω ∑ ∫ ∫ ∑ ∞ −∞ = − − − ∞ −∞ = − ⎞ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = = m m n j n j m m j d e m x d e e m x 2 1 ] [ ] ] [ [ 2 1 ) ( ω π ω π π π ω π π ω ω ∑ ∞ −∞ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = m m n m n m x ) ( ) ( sin ] [ π π ] m n [ n m n m , − δ = ⎩ ⎨ ⎧ ≠ = = 0 1 n m , ⎩ ≠ 0 ∑ ∞ − δ = ] m n [ ] m [ x ] n [ x̂ ∑ −∞ = m Sufficient condition for Sufficient condition for ] n [ x ] n [ x̂ = ∞ < ω | ) e ( X | j ∑ ∑ ∞ −∞ = ω − ∞ −∞ = ω − ω ≤ = n n j n n j j | e || ] n [ x | | e ] n [ x | | ) e ( X | ∑ ∞ −∞ = ∞ ≤ ≤ n | ] n [ x |
- 51. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Ex: sinc (x) = sin(pi*x)/(pi*x) ( ) (p ) (p )
- 52. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Any finite-length sequence is absolutely summable and y thus will have a Fourier transform representation.
- 53. Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example Example 2.17 Absolute 2.17 Absolute Summability Summability for for A A S Sudden udden- -Applied Exponential Applied Exponential < < = = = ∑ ω ∞ ω − ω 1 | a | or ae | for e a X(e is sequence this of transform Fourier The n u a x[n] Consider j - n j n j n 1 | 1 ) ]. [ < < < − = = ∑ ω − = i.e., x[n]; of ty summabili absolute the for condition the is 1 | a | conidtion the Clearly, 1 | a | or ae | for ae e a X(e j n 1 | 1 ) 0 ∞ < − = = ∑ ∞ = ω a a X(e n n j | | 1 1 | | ) 0
- 54. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems ⎧ ≤ | | 1 Example 2.18 Square Example 2.18 Square- -summability summability for the ideal for the ideal lowpass lowpass filter filter ⎩ ⎨ ⎧ π ≤ ω ≤ ω ω ≤ ω = ω | | , 0 | | , 1 ) e ( H c c j lp π = ω π = ω ω − ω ω ω − ω ∫ ] e [ jn 2 1 d e 2 1 ] n [ h n j n j lp c c c c Ideal lowpass requires infinite Ideal lowpass requires infinite points points ∞ < < −∞ π ω = − π = ω − ω n , n n sin ) e e ( jn 2 1 c n j n j c c In real cases, the filter lengths can not be infinite In real cases, the filter lengths can not be infinite θ θ − ω θ − ω + π = π ω = ∫ ∑ ω ω ω − − = ω d 2 / )] sin[( ] 2 / ) )( 1 M 2 sin[( 2 1 e n n sin ) e ( H c c n j M M n c j M )] [(
- 55. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer When M ↑, then ω → ωc
- 56. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.19 Fourier Transform of a constant Example 2.19 Fourier Transform of a constant Consider x[n] =1 for all n. This sequence is neither absolutely summable nor bl Th F i t f f th [ ] i th i di square summable. The Fourier transform of the sequence x[n] is the periodic impulse train ∑ ∞ ω π + ω πδ = j ) r ( ) e ( X 2 2 ∑ −∞ = r ) ( ) ( Consider the inverse Fourier transform, 1 ∫ ∑ ∞ π 1 ) 2 ( 2 2 1 ] [ = ⋅ + = ∫ ∑ − −∞ = ω π ω πδ π ω π π d e r n x n j r Example 2.20 Fourier Transform of complex Exponential Sequences Example 2.20 Fourier Transform of complex Exponential Sequences ∑ ∞ −∞ = ω π + ω − ω πδ = r j ) r ( ) e ( X 2 2 0 1 π ∞ ∫ n j r d e r n x 0 1 ) 2 ( 2 2 1 ] [ ω π π ω π ω ω πδ π ⋅ + − = ∞ − −∞ = ∫ ∑ n j n j n j r e e d e r 0 0 0 ) ( 0 ) 2 ( 2 2 1 ω ω ω ω π π ω π ω ω πδ π = ⋅ ⋅ + − = − − ∞ −∞ = ∫ ∑
- 57. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer
- 58. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Discrete-Time Fourier Transform of Unit Step Function 1 1/2 1/2 = + 1/2 -1/2 1 1 1/2 } ) 2 ( { 2 1 , ) 2 ( 2 } 1 { 2 1 ] [ 2 1 ] [ 1 r π ω πδ F r π ω πδ F n Sqn n u + = ∴ + = + = ∞ − ∞ ∑ ∑ Q 2 1 2 1 ]} [ { , 0 , 1 0 , 1 ] [ 2 0 1 e α e α n Sqn F n n n Sqn n n ω j n n n ω j n r r + − = ∴ ⎩ ⎨ ⎧ < − ≥ = ∞ = − − −∞ = − − −∞ = −∞ = ∑ ∑ ∑ ∑ 1 1 1 1 1 1 1 1 2 1 ) ( 1 1 1 2 1 2 1 ) ( 1 2 1 1 0 0 ' 1 ' ' e α e α e α e α ω j ω j ω j n n ω j n n n ω j n ⎞ ⎛ − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − − − − ∞ = − ∞ = − − ∑ ∑ 1 1 1 1 1 2 1 2 1 1 1 2 1 1 2 1 α e α α e α e α α e e ω j ω j ω j ω j ω j + = − + − − = − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = − − − − ) ( 1 1 2 1 1 1 2 1 )} ( { , 1 1 2 2 ω πδ e e t u F then α for e α e α ω j ω j ω j ω j + − + − = ⇒ = − + − = − − − −
- 59. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.19 Fourier Transform of Example 2.19 Fourier Transform of Complex Exponential Sequences Complex Exponential Sequences Consider a sequence x[n] whose Fourier transform is the periodic impulse train ∑ ∞ ω π + ω − ω πδ = j r e X ) 2 ( 2 ) ( 0 −∞ = r Applying inverse Fourier transform, we have ( ) n j n j j d e d e e X n x π π − ω π π − ω ω ω ⋅ ω − ω πδ π = ω ⋅ π = ∫ ∫ 0 2 2 1 ) ( 2 1 ] [ n j 0 e ω =
- 60. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.8 Symmetry Properties of The Fourier Transform 2.8 Symmetry Properties of The Fourier Transform Definition Definition Definition Definition Conjugate Conjugate- -symmetric sequence: symmetric sequence: C j t C j t ti t i ti t i ] n [ x ]) n [ * x ] n [ x ( ] n [ x * e e − = − + = 2 1 ] [ ]) [ * ] [ ( ] [ * 1 ] n [ x ] n [ x ] n [ x o e + = Conjugate Conjugate- -antisymmetric sequence: antisymmetric sequence: ] n [ x ]) n [ * x ] n [ x ( ] n [ x o o − − = − − = 2 Summation Summation Odd Odd Even sequence Even sequence Odd sequence Odd sequence Definition Definition Conj gate Conj gate s mmetric seq ence s mmetric seq ence ) e ( X )) e ( * X ) e ( X ( ) e ( X j * j j j ω − ω − ω ω = + = 1 Conjugate Conjugate- -symmetric sequence: symmetric sequence: Conjugate Conjugate- -antisymmetric sequence: antisymmetric sequence: ) e ( X )) e ( * X ) e ( X ( ) e ( X e e = + = 2 ) e ( X )) e ( * X ) e ( X ( ) e ( X j * o j j j o ω − ω − ω ω − = − = 2 1 Summation Summation ) e ( X ) e ( X ) e ( X j o j e j ω ω ω + = Even spectrum Even spectrum Odd spectrum Odd spectrum
- 61. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems
- 62. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example 2.21 Illustration of Symmetry Properties Example 2.21 Illustration of Symmetry Properties
- 63. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.9 Fourier Transform Theorems 2.9 Fourier Transform Theorems ]} n [ x { F ) e ( X jω = )} e ( X { F ] n [ x ]} n [ x { F ) e ( X F jω − = 1 2.9.1 Linearity of the Fourier Transform 2.9.1 Linearity of the Fourier Transform ) e ( X ] n [ x j F ω ↔ ) e ( X ] n [ x F j F ω ↔ 1 1 ) e ( X ] n [ x j F ω ↔ 2 2 ) ( bX ) ( X ] [ b ] [ j j F ω ω ) e ( bX ) e ( aX ] n [ bx ] n [ ax j j ω ω + ↔ + 2 1 2 1
- 64. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.9.2 Time Shifting and Frequency Shifting 2.9.2 Time Shifting and Frequency Shifting F ) e ( X ] n [ x j F ω ↔ Time shifting Time shifting ) e ( X e ] n n [ x j n j F d ω ω − ⋅ ↔ − Time shifting Time shifting ) e ( X e ] n n [ x d ↔ Frequency shifting Frequency shifting ) e ( X ] n [ x e ) ( j F n j 0 0 ω − ω ω ↔ 2.9.3 Time Reversal 2.9.3 Time Reversal j F ω ) e ( X ] n [ x jω ↔ X[n] is time reversed X[n] is time reversed ) e ( X ] n [ x j F ω − ↔ − ) ( ] [ X[n] is real and time reversed X[n] is real and time reversed ) e ( X ] n [ x j * F ω ↔ − Conjugate-symmetric
- 65. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.9.4 Differentiation in Frequency 2.9.4 Differentiation in Frequency F ) e ( X ] n [ x j F ω ↔ ω ) ( dX j F ω ↔ ω d ) e ( dX j ] n [ nx j F then 2.9.5 Parseval’s Theorem 2.9.5 Parseval’s Theorem ) e ( X ] n [ x j F ω ↔ ) e ( X ] n [ x ↔ ∫ ∑ π ω ∞ ω = = d | ) e ( X | | ] n [ x | E j 2 2 1 then ∫ ∑ π − −∞ = π | ) ( | | ] [ | n 2
- 66. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.9.6 The Convolution Theorem 2.9.6 The Convolution Theorem F ) e ( X ] n [ x j F ω ↔ ) ( H ] [ h j F ω ↔ ) e ( H ] n [ h jω ↔ ∑ ∞ = − = ] n [ h * ] n [ x ] k n [ h ] k [ x ] n [ y ∑ −∞ = n ] [ ] [ ] [ ] [ ] [ y ) e ( H ) e ( X ) e ( Y j j j ω ω ω = Then Then ∑ ∑ ∑ ∞ ω − ∞ ∞ ω − ω n j n j j e ] k n [ h ] k [ x e ] n [ y ) e ( Y ) e ( H ) e ( X ) e ( Y j j j = Then Then ∑ ∑ ∑ ∑ ∑ ∞ ∞ −∞ = −∞ = −∞ = − = = j j j k j k j n n j j e ] k n [ h ] k [ x e ] n [ y ) e ( Y ∑ ∑ −∞ = ω ω ω − −∞ = ω − = ⋅ = m j j m j k k j ) e ( H ) e ( X e ) e ] k [ x ]( m [ h
- 67. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems ) ( X ] [ j F ω ↔ Consider ideal delay system Consider ideal delay system ) e ( X ] n [ x jω ↔ d n j F d e ] n n [ ω − ↔ − δ d ] [ d n j j j F d e ) e ( X ) e ( Y ] n n [ * ] n [ x ] n [ y ω − ω ω = ↔ − δ =
- 68. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems 2.9.7 The Modulation or Windowing Theorem 2.9.7 The Modulation or Windowing Theorem ) ( X ] [ j F ω ) e ( W ] n [ W ) e ( X ] n [ x j F j F ω ω ⎯→ ← ⎯→ ← then ] n [ w ] n [ x ] n [ y = ∫ π θ θ ) ( j j 1 ∫ π π − θ − ω θ θ π d ) e ( W ) e ( X ) ( j j 2 1 C id n j ] [ ] [ ]} [ { F ω − ∞ ∑ Consider n j e ] n [ w ] n [ x ]} n [ y { F ω ∞ − ∑ = When ω =0, 0 0 = ω ω − ∞ ∞ − = ω = ∑ | e ] n [ x ] n [ x | ]} n [ y { F n j * 0 2 1 = ω ω − θ π π − θ θ π = ∫ | d ) e ( X ) e ( X ) ( j * j Parseval’s Theorem
- 69. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer ] [ ] [ ] [ ) 1 ( n n n n u a n u na n u a n Check + = + 1 1 1 1 1 1 ω j ω j ω j DTFT ae ae ae ω d d j − − − − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⎯ ⎯ → ⎯ ( ) ( )2 2 1 1 1 1 1 ω j ω j ω j ae ae ae ae − − − − = − + − =
- 70. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer
- 71. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example Example 2.22 2.22 ω − ω − = = , 1 1 ) ] [ n j j 1 n 1 e (e X transform Fourier its with n u a [n] x For − = ]. 5 [ ] [ n A n u a n x of transform Fourier the find please ( ) ω − ω ⋅ ⎯→ ⎯ − 0] [ : 0 n j j F e e X n n x Answer Q { } − ω − − = ⋅ = ∴ = − = − = 5 5 2 2 1 5 ]} [ { 1 ] [ ]. [ ] 5 [ ] 5 [ ] [ j j n 5 - n x a F e n x F n x n x n u a n x a and { } { } { } ω − ω − ⋅ = = ⇒ − 5 5 2 5 2 ] [ ] [ ]} [ { 1 ] [ j j j e a n x F a n x F a { } { } ω − − 2 1 ] [ ] [ j a
- 72. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example Example 2.23 2.23 f T f F i i th fi d Pl ( ) ) 1 )( 1 ( 1 be ae e X of Transform Fourier inverse the find Please j j j − − = ω − ω − ω : ) 1 )( 1 ( Answer be ae ( ) 1 ) /( 1 ) /( ) 1 )( 1 ( 1 be b a b ae b a a be ae e X j j j j j ⎞ ⎛ ⎞ ⎛ − − − − − = − − = ω − ω − ω − ω − ω ] [ ] [ ] [ 1 n u b b a b n u a b a a n x n n F ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎯ ⎯ → ⎯ −
- 73. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Chapter 2 Discrete Chapter 2 Discrete- -Time Signal and Systems Time Signal and Systems Example Example 2.24 2.24 is phase linear with filter highpass a of response frequency The 0 | | ) ( c c n j j | | , , e e H p f g p f p f q y d ⎪ ⎩ ⎪ ⎨ ⎧ ω < ω π < ω < ω = ω − ω ( ) ) ( ) ( 1 ) ( j lp n j n j j lp n j j c e H e e e H e e H as expressed be can response frequency This . understood is 2 of period a where d d d − = − = π ⎩ ω ω − ω − ω ω − ω ( ) { } ) ( sin , sin ) ( d j c j lp 1 - p p n n n n e H F Since ω π ω = ω ) ( ) ( sin ] [ ) ( d d c d j n n n n n n e H − π − ω − − δ = ∴ ω
- 74. Discrete-Time Signal Processing, 2/E by Alan V. Oppenheim and Ronald W. Schafer Properties of Properties of Fourier Representation Fourier Representation 1 F F i 1. Four Fourier representations: Table 3.2 Table 3.2. t Ω t 0 Ω t 0 Ω t Ω t Ω Ω Ω Ω Ω 0 Ω Ω n ω0 n ω n ω ω ω n ω0 0 ω n ω ω ω