
Recomendados
Más contenido relacionado
Similar a 1r BATX.dinamica.ppt
Similar a 1r BATX.dinamica.ppt (20)
1r BATX.dinamica.ppt
- 2. 2 Sentit Mòdul Direcció Elements dels vectors força Mòdul o intensitat és la longitud del vector. Direcció és la recta que conté el vector. Indica la seva inclinació. Sentit, indicat per la fletxa. Punt d’aplicació, punt on comença el vector Una força és una magnitud vectorial. La seva unitat en el SI és el Newton (N) Dinamòmetre, aparell per mesurar forces
- 3. 3 Forces concurrents són aquelles les direccions de les quals es tallen en algun punt. Mateixa direcció i sentit Mateixa direcció i sentits oposats El mòdul és la suma dels mòduls El mòdul és la diferència dels mòduls F1 = 6 N F2 = 5 N R = 11 N R = 2 N F2 = 4 N F1 = 6 N Suma de forces concurrents amb la mateixa direcció (4t)
- 4. 4 Regla del paral·lelogram F1 → F2 → R → R → F2 → F1 → Suma de forces concurrents amb diferent direcció (4t) 2 2 2 1 F F R Teorema de Pitàgores 2 forces: Més de 2 forces: Si són perpendiculars
- 5. 5 Força neta o resultant d’un sistema de forces ... f f f R 3 2 1 En general: F1 F1 F1 F2 F2 F2 F3 R R R Composició de forces
- 6. 6 El mòdul de la resultant és la suma dels mòduls de les dues forces. El seu sentit és el de la força més intensa i el seu mòdul és la diferència de mòduls. El mòdul, direcció i sentit de la força resultant queden determinats gràficament a partir de la regla del paral·lelogram. Numèricament: cal descomposar els vectors en les seves components El mòdul de la força resultant es pot calcular gràficament mitjançant la regla del paral·lelogram i numèricament per mitjà del teorema de Pitàgores. Força neta o resultant d’un sistema de forces
- 7. 7 Descomposició de forces (batx) Coordenades cartesianes: components d’una força X Y Cada component : F Fx Fy F F F y x j F i F F y x Es pot escriure el vector com a suma de dos vectors dirigits sobre els eixos X i Y F El mòdul del vector : F | | F F = F F 2 y 2 x = Fx = F cos ; Fy = F sin i j Es pot expressar de 2 formes: F
- 8. 8 La suma de dues forces: j F i F F y 1 x 1 1 j F i F F y 2 x 2 2 j ) F F ( i ) F F ( F F y 2 y 1 x 2 x 1 2 1 Suma de forces mitjançant components
- 9. 9 L’allargament de les molles és proporcional al pes que hi pengem. La llei de Hooke diu que quan s’ aplica una força a una molla, li provoca una deformació directament proporcional al valor d’aquesta força. Llei de Hooke F = k· ∆l= k · ( l –lo )
- 10. 10 LES FORCES I EL MOVIMENT DE ROTACIÓ Els sòlids poden ser de 3 tipus: - Rígid:un cos format per un conjunt de punts que sempre estan a la mateixa distància entre ells. - Flexible: un cos que és pot deformar.
- 11. 11 MOMENT D’UNA FORÇA El moment d'una força indica la tendència d'un cos a girar respecte a un eix que passa per un punt específic. M=F·d=F·r·sin ; M= moment d’una força F d = distància entre el punt a la recta d’aplicació de la força F r = distància entre el punt i el punt d’aplicació P = angle que formen la recta d’aplicació de la força F i la recta que passa pel punt P i el punt.
- 12. 12 • I el sentit ve donat per la regla de la ma dreta: • “Si posem els dits de la palma de la ma dreta en la direcció que va des del punt on calculem el moment cap al punt d’aplicació de la força. i després el girem cap al • sentit de la força , el dit gros de la ma dreta ens indica el sentit del moment de la força respecte el punt.
- 13. 13 MOMENT RESULTANT D’UN SISTEMA DE FORCES • Si sobre un cos hi actuen simultàniament diverses forces, el moment resultant del sistema és • igual a la suma vectorial dels moments de cadascuna de les forces. • Mt= M1+ M2+ ...+Mn
- 14. 14 ISAAC NEWTON (1643-1727) • “Si he logrado ver mas lejos, ha sido porque he subido a hombros de gigantes” • Dona les gràcies als treballs de Copèrnic, Descartes i a Kepler. • Va escriure el llibre Principia, el primer llibre de física teòrica que és considerat com l’obra més important de la història de la ciència.
- 15. 15 • Va escriure els 3 llibres que formen Principia en 18 mesos. • Amb 5 anys construïa rellotges, cometes i dibuix arquitectònic però en l’escola era considerat com un dels pitjors estudiants. • Van marcar la seva vida la seva arrogància i disputes(sobre tot amb Hooke). • Va escriure: “No se que pareix el món, però tinc la impressió d’haver sigut com un infant jugant en la costa”
- 16. 16 La primera llei de Newton o llei d’inèrcia Si sobre un cos no actua cap força o la resultant de les forces que hi actuen és zero, el cos resta indefinidament en el seu estat de repòs o de moviment rectilini i uniforme se s’estava movent. Quan el cotxe arrenca, et quedes enganxa’t en el seient, ja que tendeixes a seguir en repòs. Quan el cotxe frena, et desplaces cap a davant, ja que tendeixes a estar en moviment.
- 17. 17 La segona llei de Newton Quan sobre un cos actua una força resultant no nul·la, el cos adquireix una acceleració d’igual direcció i sentit que la força aplicada. L’acceleració adquirida és proporcional a la força neta i la constant de proporcionalitat és la massa del cos. a m F . a → F → FR = m ·a
- 18. 18 Tercera llei de Newton. Principi d’acció i reacció Quan un cos A exerceix una força sobre un altre cos B, el cos B exerceix sobre el cos A una força oposada, és a dir, d’igual mòdul i direcció però de sentit contrari. - P → P → P → N → S’anomena força normal (N) a la força de reacció d’un pla sobre un cos que està sobre d’ell. És una força perpendicular al pla i de sentit oposat al de la superfície. El pes (P) d’un cos és la força amb que la Terra l’atrau. Quan un cos cau per acció del seu propi pes, es mou amb l’acceleració de la gravetat, a = g = 9,8 m/s2. Tenint en compte el principi fonamental de la dinàmica: F = m ⋅ a → P = m ⋅ g No s’anul·len perquè actuen sobre cossos diferents
- 19. 19 La força normal. Quan un cos està damunt d’una superfície, fa una força sobre ella a conseqüència del pes. Per la 3ª llei de Newton, la superfície fa una força igual però de sentit contrari sobre el cos, que anomenem força normal. Sense forces externes Amb forces externes verticals Cossos sobre una superfície horitzontal Sense que s’aixequi
- 20. 20 El fregament és una força que sempre s’oposa al moviment P → N → Fmotor → Ff → Ff = μc · N Força de fregament Fmotor-Ff = m · a
- 21. 21 Resolució de problemes Esquema de les forces que actuen. Descomposició de les forces en la direcció x (tangencial -la del moviment) i en la direcció y (normal o perpendicular). Suma de forces en la direcció normal: Càlcul de la Normal. Càlcul de la Força de fregament (sempre en contra del sentit del moviment). Segona llei de Newton en el sentit del moviment, tenint com a sentit positiu aquell en el qual en mòbil començarà a moure's. Càlcul de l'acceleració. Amb l'acceleració (constant) puc calcular la posició, velocitat,energia mecànica, potencial i cinètica en qualsevol moment o en qualsevol punt.
- 22. 22 La força normal-1 Amb forces externes horitzontals Cossos sobre una superfície horitzontal Y X f = N - P = 0 N = m g iy F N P = m g ix x f = F = m a El cos adquireix un MRUA d’acceleració F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y v m F ax
- 23. 23 La força normal-2 Amb forces externes Cossos sobre una superfície horitzontal Y X F N P = m g Fx Fy v F : força aplicada Fx = F cos Fy = F sin f = m a F = m a ix x x x f = m a N + F - P = 0 iy y y Forces en la direcció de l’eix X Forces en la direcció de l’eix Y m F ax N = P- Fy
- 24. 24 La força normal-3 Cossos sobre una superfície inclinada N = Py Y X N Px Py P = m g v o = 0 Px = mg sin Py = mg cos f = m a P = m a ix x x x mg sin = m a x a = g sin x f = m a N - P = 0 iy y y v Forces en la direcció de l’eix X Forces en la direcció de l’eix Y Sense forces externes
- 25. 25 La força normal-4 Cossos sobre una superfície inclinada Amb forces externes f = m a N - P = 0 iy y y N = Py L’acceleració del cos serà: Y X N Px Py P = m g v F Per a que el cos pugi, F P x Px = mg sin Py = mg cos ix x x x mg sin = m a x F - f = m a F - P = m a F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y sin 1 g m F m ax -
- 26. 26 La força normal-5 Cossos sobre una superfície inclinada Amb forces externes Y X N Py P = m g v F Px = mg sin Py = mg cos F mg sin = m ax fix = m ax F Px = m ax fiy = m ay N - Py = 0 N = Py F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y sin 1 g m F m ax Px
- 27. 27 La força normal-6 Cossos sobre una superfície inclinada Amb forces externes Y X N Py P = m g F Px = mg sin Py = mg cos F cos - mg sin = m ax fix = m ax Fx - Px = m ax fiy = m ay N +Fy- Py = 0 N = Py- Fy= mg cos -F sin F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y sin cos 1 g m F m ax - Px Fx Fy v Fx = F cos Fy = F sin β
- 28. 28 La tensió Força que experimenten les cordes quan s’estiren en aplicar una força, com per exemple un pes.
- 29. 29 Força de fregament-1 µ µ c e, max Coeficient de fregament cinètic El coeficient de fregament estàtic és sempre més gran que el dinàmic. X Y v F N - P = 0 N = P = m g F - F = m a f F = µ N f F - µ N = m a x P = m g N Ff F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y ) . ( 1 g m F m a -
- 30. 30 Y X N Py P = m g v Ff y N - P = 0 N = P = m g cos y m a = ( F - mg sin - µ mg cos ) 1 f F = µm g cos F - P - F = m a x f x F - P - µm g cos = m a x Px F F : força aplicada Forces en la direcció de l’eix X Forces en la direcció de l’eix Y Força de fregament-1
- 31. 31 Cal seguir els següents passos: 1-Elegir un sentit lògic del moviment. Si al final l’acceleració obtinguda és negativa, significa que el sentit correcte és el contrari i caldrà fer de nou els càlculs. 2-Dibuixar totes les forces i descomposar les que no siguin ni paral·leles ni perpendiculars al desplaçament del cos. Despreciar les politges en els càlculs. 3-Considerem positives les forces que van a favor del moviment i negatives les que van en contra. 4-Si hi ha varis cossos units, cal plantejar la segona llei de Newton per cada cos per separat, posant per cada cos una equació on només hi hagi les forces directament implicades sobre el cos i que coincideixin amb la direcció amb que es mou el cos. 5-El sistema d’equacions obtingut es resolt fàcilment sumant totes les equacions Cossos units
- 32. 32 Cossos units-1: Màquina d’Atwood
- 35. 35 Dinàmica del moviment circular. v1 Fc Fc v2 v3 Fc v4 Fc R v m a m n c F 2 Força centrípeta: força que cal aplicar a un cos perquè segueixi una trajectòria circular.
- 36. 36 Dinàmica del moviment circular.
- 37. 37 Dinàmica del moviment circular horitzontal. 1) Cos amb corda Fc = T N = mg Eix Y: Eix X: T R v m 2 2) Cotxe mg R v m 2 Fc = Ff f = N - P = 0 N = m g iy Forces en la direcció de l’eix Y fix = Fc = Ff = m an Forces en la direcció de l’eix X Ff = N Rg v
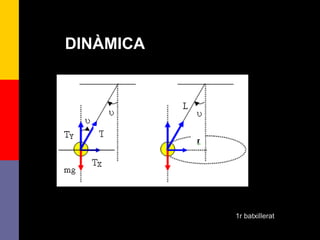
- 38. 38 3) Cos amb corda (con) Eix Y: Eix X: R v m T F x c 2 Ty = mg Tx= T sin Ty = T cos g m T R v m T sin cos 2 Rg v tg 2 4) Cotxe amb peralt Eix Y: Eix X: Ny = mg Nx= N sin R v m N F x c 2 Ny = N cos g m N R v m N sin cos 2 Rg v tg 2 Dinàmica del moviment circular horitzontal.
- 39. 39 Dinàmica del moviment circular vertical. R v m mg T Fc 2 - R v m T Fc 2 R v m mg T Fc 2 V min quan T=0 Rg v T serà màxima Punt baix : A Punt alt : B
- 40. 40 S’anomena quantitat de moviment o moment lineal el producte de la massa d’un cos per la seva velocitat. v · m p És el producte d’un escalar positiu (massa) per un vector (velocitat). És, per tant, un altre vector amb la mateixa direcció i el mateix sentit que el vector velocitat. En el SI s’expressa en kg·m·s-1. m v p Quantitat de moviment. Definició
- 41. 41 Relació amb la força resultant Relació entre la força resultant constant aplicada a un cos i la seva quantitat de moviment: Δt p Δ F F a m· F t v a a m Si l’acceleració és constant: Substituint: t p t p - p t v m - v m t v - v m t v m· F o o o Quantitat de moviment. 2ª llei de Newton:
- 42. 42 L’equació anterior és una forma alternativa d’enunciar la segona llei de Newton. El seu interès radica en què: Δt p Δ F S’acosta més a la formulació original de Newton. És vàlida tant per a la mecànica clàssica com per a la relativista. La resultant de totes les forces aplicades a un cos és igual al quocient entre la variació de la seva quantitat de moviment i l’interval de temps transcorregut. Quantitat de moviment.
- 43. 43 Conservació de la quantitat de moviment d’una partícula L’equació t p F constant p 0 p 0 t p 0 F si permet formular: Si la força resultant que actua sobre un cos és zero, la quantitat de moviment del cos es manté constant. Quantitat de moviment.
- 44. 44 Impuls mecànic d’una força constant L’impuls mecànic que una força constant F dóna a un cos és el producte de la força pel temps que hi actua. t · F I És una magnitud vectorial, producte del vector força per l’escalar positiu t. Té, per tant, la mateixa direcció i el mateix sentit que el vector força. En el SI el seu mòdul s’expressa en N·s. Impuls mecànic. (La pilota canvia la direcció de moviment i el mòdul de la velocitat. Per tant varia la quantitat de moviment) (Si acompanyem la pilota, l’impuls és major)
- 45. 45 Considerem una força constant F que actua un temps t sobre un cos. Representem la força en ordenades i el temps en abscisses: t F to t t F L’impuls que proporciona la força ve donat per la superfície del rectangle ombrejat. ombrejada Àrea ) t - (t · F t · F I 0 Impuls mecànic. Impuls mecànic d’una força constant Si la força és variable, igualment, l’impuls serà l’àrea sota la corba o recta.
- 46. 46 L’impuls d’una força és l’àrea continguda sota la corba F-t. La força és constant. La força és variable. Una força variable es pot substituir per una força mitjana que provoca el mateix impuls (les àrees sota els dos gràfics són iguals). Impuls mecànic.
- 47. 47 Relació entre l’impuls mecànic i la quantitat de moviment m vo v t F de: Δt p Δ F t · F p i com: t · F I p I s’obté: En la deducció anterior s’ha suposat que la força F és constant i que el moviment és unidimensional. El resultat, però, pot extendre’s a una força variable i a un moviment tridimensional. L’impuls mecànic proporcionat a un cos és igual a la variació que experimenta la seva quantitat de moviment. p p - p I 0 Impuls mecànic.
- 48. 48 Forces internes i forces externes Les forces que actuen sobre un conjunt de n partícules poden ser de dos tipus: 1. Forces internes. Són les forces d’interacció entre les partícules. Poden ser gravitatòries, electrostàtiques, de contacte, … Es presenten sempre per parelles (tercera llei de Newton), de manera que quan es considera el sistema de dues partícules, les forces internes s’anul·len. 2. Forces externes. Són exercides per agents exteriors al sistema. Sistemes de partícules.
- 49. 49 Conservació de la quantitat de moviment Considerem dos cossos que es troben aïllats del seu entorn. Sobre el sistema de dos cossos no hi actuen, doncs, forces externes, només les forces internes d’interacció. Força que actua sobre el cos 1 (deguda a 2): t p F 1 1 2 1 F - F Força que actua sobre el cos 2 (deguda a 1): t p F 2 2 Segons la tercera llei de Newton: t p - t p 2 1 0 t p t p 2 1 0 t p p ( 2 1 ) constant p p 2 1 0 p p ( 2 1 ) m1 m2 F1 F2 Sistemes de partícules.
- 50. 50 Aquest resultat pot generalitzar-se per a un sistema amb un nombre qualsevol de partícules i constitueix el principi de conservació de la quantitat de moviment per a un sistema de partícules. Si la suma de forces externes que actuen sobre un sistema de partícules és zero, la quantitat de moviment del sistema es manté constant. constant p 0 p 0 F exteriors cte n 2 1 n 2 1 v m ... v m v m p ... p p p on: Sistemes de partícules. Per 2 cossos v m v m v m v m 2 2 1 1 02 2 01 1 Aplicació: xocs