Kalman Filter | Statistics
•Descargar como PPTX, PDF•
2 recomendaciones•2,461 vistas

Kalman Filter, also known as Linear Quadratic Estimation (LQE) is the algorithm that uses series of measurements that are observed over time and that contains statistical noise and other inaccuracies that are found in the given system. Copy the link given below and paste it in new browser window to get more information on Kalman Filter:- http://www.transtutors.com/homework-help/statistics/kalman-filter.aspx

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Kalman Filter | Statistics
Similar a Kalman Filter | Statistics (20)
Más de Transweb Global Inc
Más de Transweb Global Inc (20)
Último
Último (20)
Kalman Filter | Statistics
- 2. Introduction Kalman filter, also known as linear quadratic estimation (LQE) is the algorithm that uses series of measurements that are observed over time and that contains statistical noise and other inaccuracies that are found in the given system It produces the estimation of unknown variables that tend to be more precise that are based on single measurement that are taken from the study They are estimated using Bayesian inference and joint probability distribution over variables for each timeframe that is considered in the field
- 3. Kalman filter The kalman filter was first described and partially developed in technical papers by swerling, kalman and bucy And the name was given by Randolf E. kalman who laid the foundation for the theory. Kalman filters have been used in the implementation of the navigation systems of U.S. Navy nuclear ballistic missile submarine and in the guidance and navigation of cruise missiles such as U.S. navy’s tomahawk missile and the U.S. air force’s air launched cruise missile It is also used in the guidance and navigation of reusable launch vehicle and in the attitude control of spacecraft. This digital filter is sometimes called the stratonovich-kalman – bucy filter as it is a special case of a general, non-linear filter developed earlier stage
- 4. Implementation Predict Predict a state estimate Predicts a estimated covariance Update Measurement of residual values Optimal kalman gain Update a state estimate Update a estimate covariance Estimation of noise variances
- 5. Working of kalman filter The Practical implementation of this type of filter is difficult in getting a good estimation of the noise factors and hence the simulation techniques like octave and mat lab should be used to calculate the noise covariance using the AL technique. The working of the filter is similar to the optimal filter and when the noise covariances are to be estimated, and when the kalman filter works optically, the innovation sequence is a white noise, which measures the filter performance in turn.
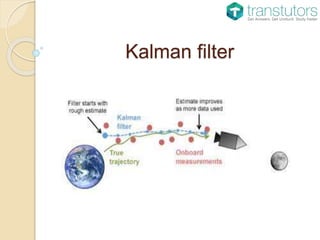
- 6. Application The kalman filter is mainly designed for tracking. We can use it to predict a physical object’s future location, to reduce noise level in the detected location or to help associate multiple physical objects with their corresponding tracks. This filter can be configured for each physical object for multiple object tracking. The prediction and correction method is used in the tracking method. GPS technique is also used in this type of tracking process is called kalman filter tracking The kalman filter has several applications in the field of technology. A common application consists of guidance, navigation and control of vehicles, particularly aircraft and spacecraft instruments The kalman filter works in two-step process and hence does not make any assumption to know whether the errors are gaussian or not. However, the field yields the exact conditional probability that estimates the special case that all the errors are gaussian- distributed
- 7. Applications It is widely applied in time-series analysis that is used in fields such as signal processing, ecometrics and in robotics. In the field of robotic motion planning and, they are sometimes included in the trajectory optimization of the robotic subjects. The filter also works for modeling of the central nervous system’s control that helps in the movement control. Due to this time delay between the issuing motor commands and the receiving sensory feedback, usage of kalman filter supports the realistic model for making estimations in the current state of motor system and in issuing updated commands of the field. Extensions and generalizations has been developed, such as the extended kalman filter and unscented kalman filter that works on nonlinear systems and in other system. The underlying model is a Bayesian model and is similar to the hidden markov model and can be applied for linear system.
- 8. Conclusion The kalman filter is discussed along with its features, definitions, examples and the ways in which it is implemented and analyzed with its applications in detail. Still, many more applications are possible in technology and in other fields of communication
- 9. Hey Friends, This was just a summary on Kalman Filter. For more detailed information on this topic, please type the link given below or copy it from the description of this PPT and open it in a new browser window. http://www.transtutors.com/homework- help/statistics/kalman-filter.aspx