
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (7)
Destacado
Destacado (15)
Similar a Phy b13 2-2
Similar a Phy b13 2-2 (17)
Más de Tianlu Wang
Más de Tianlu Wang (20)
Phy b13 2-2
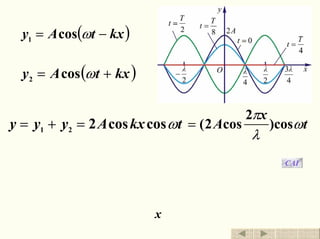
- 1. ( )kxtAy −= ωcos1 ( )kxtAy += ωcos2 tkxAyyy ωcoscos221 =+= t x A ω λ π )cos 2 cos2(= 振幅因子 谐振因子 CAI 驻波波线上的各质元都以同一频率作简谐振动 不同质元的振幅随其位置 x 作周期性变化 退出返回
- 2. txAy ω λ π )cos 2 cos2(= 坐标: 2 λ nx =波腹 L210 ,,, ±±=n 22 )1(1 λλ nnxx nn −+=−+相邻波腹间距: 2 λ = CAI 波节 坐标: 4 )12( λ += nx L210 ,,, ±±=n 2 1 λ =−+ nn xx相邻波节间距: 退出返回
- 3. txAy ω λ π )cos 2 cos2(= 2 λ nxn = 相邻波腹: 2 )1(1 λ +=+ nxn 振幅因子 πncos π)1cos( +n 振动相位相差 π CAI 两相邻波节之间的各质元振动相位相同 在每一波节两侧各质元振动相位相反 退出返回
- 4. 能量 总平均能流密度为 0)( =−〉〈+〉〈 vwvw 平均说来没有能量的传播 驻波中的动能和势能有一定的分布且不断相互转换 弹性势能分布 动能分布 弹性势能分布 退出返回
- 6. kinetic energy displacement potential energy 退出返回
- 7. 两端固定的弦中产生的驻波 L321 2 ,,,nnL =⋅= λ …= 3,2,1,= 2 n n L nλ µ TF L n 2 = L nuu f n n 2 == λ …3,2,1,=n µ TF L f 2 1 1 = 基频 退出返回
- 8. µ T n F L nnff 2 1 1 ⋅== )1( >n 次谐频n 简正频率 一个振动系统的某个固有频率所 对应的一种稳定振动方式或一种 驻波形式 该系统的一种简正模式 或振动模式 多自由度驻波系统中的任一波 扰动,可以看成是一系列简正 模式的线性叠加。 退出返回
- 11. 两个简正模合成一个行波 01 =tω 前二个简正模 4 1 π ω =t 2 1 π ω =t 4 3 1 π ω =t πω =t1 CAI
- 12. 三个简正模合成一个行波 01 =tω 4 1 π ω =t 2 1 π ω =t 4 3 1 π ω =t 前三个简正模 πω =t1CAI
- 13. The Doppler Effect§13.6 多普勒效应 CAI 波源静止 观测者静止 波源或观测者的运动造成观测频率与波源频率不同 的现象 多普勒效应 Doppler effect In 1842 Johann Christian Doppler 退出返回
- 14. Case A 波源运动 观测者静止 相对于连续介质 Case B 观测者运动波源静止 CAI Case C 波源运动 观测者运动 弹性波的波速u 由介质的性质决定 波源和观测者的运动都发生在它们之间的连线上 波源相对于介质的速度sv 观测者相对于介质的速度rv 退出返回
- 15. Case A: 观测者运动 A Moving Receiver rv 观测者的接收频率 单位时间内通过观测者 的完整波长数 rvu + λ r r vu f + = f u vu f/u vu rr + = + = CAI ffr >0>rv观测者向着波源运动时 ffr <0<rv观测者背离波源运动时 退出返回
- 16. Case B: 波源运动 A Moving Source CAI TvuT s−=′λ f vu u s−TvuT uu f s r − = ′ = λ = 0>sv ffr >波源向着观测者运动时 0<sv ffr <波源背离观测者运动时 退出返回
- 17. Case C: 观测者、波源都运动 波源以速度 相对于介质运动sv TvuT s−波长变为 观测者以速度 相对于介质运动rv rvu +波相对于观测者的波速变为 f vu vu s r − + = TvuT vu f s r r − + = CAI 波源和观测者的运动不是沿着它们的连线方向 ( 纵向 ) f vu vu f ss rr r θ θ cos cos − + = sv r sθ rs rθ rv r 返回 退出
- 18. 电磁波的多普勒效应 在r所在的 参考系中v r θ rs f c v c v f r θcos 1 1 2 2 − − = 在 r 所在的参考系中波源 s 的运动速度v f vc vc fr − − = 22 f vc vc − + =纵向多普勒效应 f c v 2 2 1 −=f c vc fr 22 − =横向多普勒效应 电磁波的传播 不需要介质 有意义的只是波源与接收器间的相对运动 退出返回
- 19. f vc vc fr − + =遥远星系发来的光 光谱分析 有一些在实验室中已确认的谱线显著地移向了长波端 谱线红移 red shift of spectral line 钾光谱中易辨认的一对吸收线 K 线和 H 线 在地面实验室中是出现在波长395nm 附近 在来自牧夫星座一个星云的光中,却在波长447nm 处 观测到了这两条谱线 f vc vc fr − + = 退出返回
- 20. f vc vc fr − + = vc vc r − + =2 2 λ λ λλ c vc vcc r − + = nm447=rλnm395=λ cv r r s 22 22 λλ λλ + − = c22 22 447395 447395 + − = c.1230−= 退出返回
- 21. 雷达测速仪在高速公路上 监测车速 f vc vc f − + =′ f vc vc ffffb )1( − − + =−′′== ∆ f vc v ) 2 ( − = f c v2 ≈f c v c v ) 1 2 ( − = f vc vc f ′ − + =′′ f vc vc − + = m/s103 8 ×=c30m/s~km/h108=v 雷达波速车速 Hz4≈bfMHz02≈f发射频率 退出返回
- 22. 波源的速度超过波速 sv u =θsinMach cone angle Mach cone马赫锥 shock wave激波 or 冲击波 A bullet passing through the hot gases above a candle flame produces a shock wave because its speed is faster than the speed of sound in air 返回 退出 CAI 马赫波