Robot Markovito4
•Descargar como PPT, PDF•
0 recomendaciones•339 vistas

El documento describe las capacidades de reconocimiento de ademanes, voz y objetos de un robot. Explica cómo el robot puede reconocer ademanes mediante el seguimiento de manos y la extracción de características, reconocer comandos de voz usando herramientas estándar de síntesis y reconocimiento de voz, y reconocer objetos almacenando y emparejando características visuales. También detalla la capacidad del robot para identificar personas basada en el reconocimiento de siluetas usando visión estéreo.
![Reconocomiento de ademanes ,[object Object],[object Object],[object Object],Imagenes EC Carateríst. R M Ademanes](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recomendados
Más contenido relacionado
Destacado
Destacado (20)
Más de Futura Networks
Más de Futura Networks (20)
Último
Último (10)
Robot Markovito4
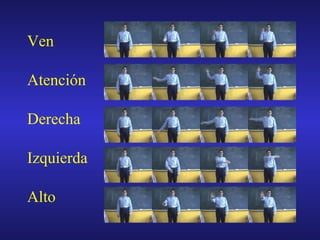
- 1. Ven Atención Derecha Izquierda Alto
- 3. Seguimiento y Ejecución de Comandos Localiza cara y mano Seguimiento de la mano
- 4. Características de postura y movimiento (0,0) x y Image t . . y ' x ' a = 0 x = + y = – form = + Image t+1 Above Right Torso
- 5. Reconocimiento Ademanes Seguimiento de la mano Control por gestos
- 7. Interfaz Amigable A través de su cara animada, Markovito puede expresar diversas emociones, lo que facilita la comunicación