Tabla de frecuencia con histograma y circular
•Descargar como PPTX, PDF•
0 recomendaciones•326 vistas

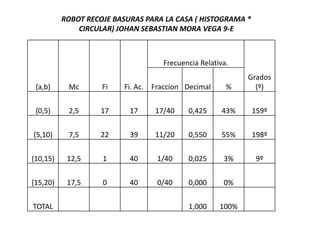
Este documento presenta los resultados de un histograma circular sobre un robot recolector de basura. Muestra las frecuencias relativas de ángulos medidos en grados para 4 intervalos de ángulos entre 0 y 20 grados. El intervalo de 5 a 10 grados tuvo la frecuencia más alta con un 55% de los casos.

Recomendados
Más contenido relacionado
La actualidad más candente
Similar a Tabla de frecuencia con histograma y circular
Similar a Tabla de frecuencia con histograma y circular (20)
Más de IETI SD
Más de IETI SD (20)
Tabla de frecuencia con histograma y circular
- 1. ROBOT RECOJE BASURAS PARA LA CASA ( HISTOGRAMA * CIRCULAR) JOHAN SEBASTIAN MORA VEGA 9-E Frecuencia Relativa. Grados {a,b) Mc Fi Fi. Ac. Fraccion Decimal % (º) {0,5) 2,5 17 17 17/40 0,425 43% 159º {5,10) 7,5 22 39 11/20 0,550 55% 198º {10,15) 12,5 1 40 1/40 0,025 3% 9º {15,20) 17,5 0 40 0/40 0,000 0% TOTAL 1,000 100%
- 2. ROBOT HISTOGRAMA 25 20 15 Axis Title 10 5 0 {0,5) {5,10) {10,15) {15,20)
- 3. ROBOT 3 4 3% 0% 1 42% 2 55%