
Recomendados
Más contenido relacionado
Destacado
Destacado (20)
Más de Juan Carlos Flechas Prieto
Más de Juan Carlos Flechas Prieto (19)
Último
Último (8)
Seguir linea
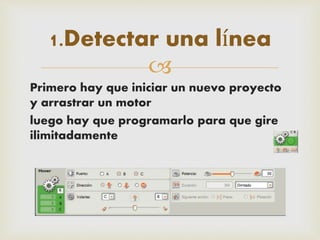
- 1. Primero hay que iniciar un nuevo proyecto y arrastrar un motor luego hay que programarlo para que gire ilimitadamente 1.Detectar una línea
- 2. Después de programar el primer motor se arrastra un temporizador de luz Luego se hace la siguiente programación 2.Detectar una línea
- 3. El ultimo paso es arrastrar otro motor hacia el área de trabajo Y bloquear el motor para que se detenga al encontrar la línea 3.Detectar una línea
- 4. 4Esto es lo que hará el robot después de la programación
- 5. Se arrastra la repetición al área de trabajo Luego se cambia la repetición a siempre Después se arrastra una bifurcación 17.Seguir una linea
- 6. Se programan los motores para que paren y avancen según la línea 17.Seguir una linea