Practica 2 aut.
•
0 recomendaciones•87 vistas
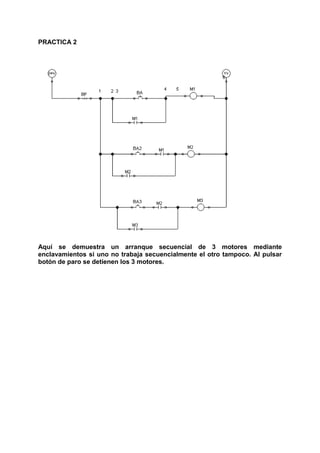
Este documento demuestra el arranque secuencial de 3 motores mediante enclavamientos, de modo que si uno no funciona secuencialmente, los demás tampoco lo harán. Al pulsar el botón de paro, los 3 motores se detienen.
Denunciar
Compartir
Denunciar
Compartir
Descargar para leer sin conexión
Recomendados
Practica 2. arranque secuencial de 3 motores.
Se simuló el arranque y paro secuencial de 3 motores, donde el motor 1 debe encender primero antes que los motores 2 y 3, y el mismo botón detiene los 3 motores.
Practica 5. Arranque Secuencial Forzado de 3 Motores.
Se simula el arranque y paro secuencial de 3 motores donde el motor 1 debe estar funcionando para que arranquen los motores 2 y 3, y los motores 1 y 2 solo se apagan cuando el motor 3 está apagado, usando marcas virtuales para controlar la secuencia.
Practica 6. Arranque y Paro de un Motor Trifasico, 6 Puntos y 2 Velocidades
Practica 6. Arranque y Paro de un Motor Trifasico, 6 Puntos y 2 VelocidadesCecyt No. 3 "Estanislao Ramírez Ruíz"
Este documento describe una simulación para arrancar y detener un motor trifásico con dos velocidades (alta y baja) y seis puntos. El motor 1 siempre funcionará junto con uno de los otros dos motores, pero los tres motores no pueden funcionar al mismo tiempo.Practica 3. Arranque y Paro de un Motor Trifasico.
Este documento describe una simulación para demostrar el arranque y paro de un motor trifásico de dos sentidos. La simulación utiliza dos motores para indicar el cambio de giro y focos pilotos para mostrar la dirección de giro del motor, con un bloqueo eléctrico para controlarlo.
Informe montaje 10 automatización
Este informe describe un montaje automatizado que utiliza dos motores trifásicos, cada uno con su propio contactor y pulsador de arranque para controlarlo individualmente, pero ambos pueden detenerse con un solo pulsador de paro. Se concluye que la señalización individual para cada motor permite saber el estado de cada uno.
Practica 7
Esta práctica utilizó un interruptor pulsador en lugar de un potenciómetro para encender y apagar una bombilla. Al presionar el botón, la bombilla se encendería, y al soltarlo se apagaría. El circuito es similar a la Práctica 6, pero sin el potenciómetro, usando en su lugar un interruptor pulsador para controlar la bombilla.
Robotica
Los robots son sistemas automáticos en lazo cerrado que pueden ejecutar tareas según un programa preestablecido, captar cambios en las variables del proceso y modificar la secuencia de acciones en consecuencia. Dispositivos como las lavadoras y aspiradoras pueden considerarse robots porque son capaces de realizar múltiples tareas programadas de forma autónoma.
Sistemas automáticos
Los sistemas automáticos mantienen condiciones deseadas de forma autónoma. Los sistemas de lazo abierto como riegos operan según un cronograma fijo sin considerar resultados, mientras que los sistemas de lazo cerrado como calentadores reaccionan a resultados para lograr la condición deseada. La mayoría de robots son sistemas de lazo cerrado que cumplen ciclos continuos para lograr objetivos.
Recomendados
Practica 2. arranque secuencial de 3 motores.
Se simuló el arranque y paro secuencial de 3 motores, donde el motor 1 debe encender primero antes que los motores 2 y 3, y el mismo botón detiene los 3 motores.
Practica 5. Arranque Secuencial Forzado de 3 Motores.
Se simula el arranque y paro secuencial de 3 motores donde el motor 1 debe estar funcionando para que arranquen los motores 2 y 3, y los motores 1 y 2 solo se apagan cuando el motor 3 está apagado, usando marcas virtuales para controlar la secuencia.
Practica 6. Arranque y Paro de un Motor Trifasico, 6 Puntos y 2 Velocidades
Practica 6. Arranque y Paro de un Motor Trifasico, 6 Puntos y 2 VelocidadesCecyt No. 3 "Estanislao Ramírez Ruíz"
Este documento describe una simulación para arrancar y detener un motor trifásico con dos velocidades (alta y baja) y seis puntos. El motor 1 siempre funcionará junto con uno de los otros dos motores, pero los tres motores no pueden funcionar al mismo tiempo.Practica 3. Arranque y Paro de un Motor Trifasico.
Este documento describe una simulación para demostrar el arranque y paro de un motor trifásico de dos sentidos. La simulación utiliza dos motores para indicar el cambio de giro y focos pilotos para mostrar la dirección de giro del motor, con un bloqueo eléctrico para controlarlo.
Informe montaje 10 automatización
Este informe describe un montaje automatizado que utiliza dos motores trifásicos, cada uno con su propio contactor y pulsador de arranque para controlarlo individualmente, pero ambos pueden detenerse con un solo pulsador de paro. Se concluye que la señalización individual para cada motor permite saber el estado de cada uno.
Practica 7
Esta práctica utilizó un interruptor pulsador en lugar de un potenciómetro para encender y apagar una bombilla. Al presionar el botón, la bombilla se encendería, y al soltarlo se apagaría. El circuito es similar a la Práctica 6, pero sin el potenciómetro, usando en su lugar un interruptor pulsador para controlar la bombilla.
Robotica
Los robots son sistemas automáticos en lazo cerrado que pueden ejecutar tareas según un programa preestablecido, captar cambios en las variables del proceso y modificar la secuencia de acciones en consecuencia. Dispositivos como las lavadoras y aspiradoras pueden considerarse robots porque son capaces de realizar múltiples tareas programadas de forma autónoma.
Sistemas automáticos
Los sistemas automáticos mantienen condiciones deseadas de forma autónoma. Los sistemas de lazo abierto como riegos operan según un cronograma fijo sin considerar resultados, mientras que los sistemas de lazo cerrado como calentadores reaccionan a resultados para lograr la condición deseada. La mayoría de robots son sistemas de lazo cerrado que cumplen ciclos continuos para lograr objetivos.
Practica 9. Trabajo Alternado de 2 Motores
Los motores se encienden y apagan alternativamente después de un tiempo determinado usando temporizadores, mientras que el mismo botón de parada controla todos los motores.
Automatismos
El documento contiene esquemas eléctricos para el control y arranque de motores y otros dispositivos. Incluye esquemas para el encendido en cascada de lámparas, el arranque manual de tres motores trifásicos con contactores, el arranque de un motor trifásico con pulsadores de marcha y parada, y el control de dos contactores mediante interruptores. También presenta esquemas para la inversión del giro de motores trifásicos, el arranque y parada de varios motores, y el control de contactores de forma tempor
Cálculo martes 8 de mayo
La lección trata sobre calcular derivadas de funciones usando la regla de la cadena. Instruye a los estudiantes a derivar cinco funciones diferentes aplicando esta regla para encontrar la derivada de cada una.
AsignacióN 1 Mcii
El primer documento describe un semáforo de paso que funciona en modo intermitente hasta que un peatón presiona un botón para activar un semáforo en rojo durante 15 segundos. Se pide diseñar este semáforo usando un temporizador y una interrupción para el botón. El segundo documento pide diseñar un control para llenar un tanque de agua usando una bomba que se enciende y apaga dependiendo de los niveles mínimo y máximo, y no se activa si el depósito subterráneo alcanza un nivel de alarma
Sistemas automáticos
El documento describe los sistemas automáticos, específicamente los sistemas de lazo abierto y lazo cerrado. Explica que los sistemas de lazo cerrado son más flexibles y capaces de reaccionar si el resultado no es el esperado, mientras que los sistemas de lazo abierto como un riego por temporizador tienen una capacidad más limitada para tomar decisiones inteligentes.
S
Este documento describe un experimento para demostrar la presencia de campos magnéticos. Se construye un pequeño motor colocando un imán junto a una pila y conectando un trozo de alambre esmaltado para formar aspas. Cuando se colocan las aspas sobre la pila, estas comienzan a girar debido a la interacción entre el campo magnético del imán y la corriente eléctrica de la pila. El objetivo es demostrar de forma práctica la presencia de campos magnéticos y su uso para crear movimiento rot
Reporte 3 y 4
El documento describe dos circuitos eléctricos creados con un PLC como parte de una práctica de automatización de sistemas electromecánicos. El primer circuito usa dos botones cerrados para encender una lámpara, mientras que el segundo usa dos botones abiertos para lo mismo. Ambos circuitos fueron diseñados en el software Step 7 y probados físicamente usando botones, cables y una lámpara indicadora.
Practica # 6
Este documento describe una práctica de automatización de sistemas electromecánicos realizada por un alumno. La práctica involucra el uso de dos botoneras, cables banana-banana, un PLC y una lámpara indicadora para simular el encendido y apagado de un motor. Se incluyen diagramas que muestran la conexión de un arrancador de motores y el diagrama de conexión del PLC implementado en la práctica.
PROGRAMMING
El documento describe cómo programar un sensor de luz en NXT y sugiere agregar el sensor fotosensible a un modelo NXT para programar su comportamiento para que cambie cuando se active el sensor de luz. También menciona que el Robot Educador incluye la posibilidad de programar ideas utilizando el sensor fotosensible.
Manual de robotica parte 3
Este manual describe el uso de diferentes sensores para la robótica, incluyendo sensores táctiles, acústicos, fotosensibles y ultrasónicos. Explica cómo agregar y programar cada sensor para que un modelo cambie su comportamiento según la entrada del sensor, y cómo usar las funciones "Pruebeme", "Ver" y "Registro de datos" del NXT para probar y registrar la respuesta de los sensores.
Practica 6 aut
Este documento describe cómo probar el arranque y paro de un motor trifásico de 6 puntas con 2 velocidades. Al pulsar el primer botón de arranque, el motor funciona a baja velocidad en sentido horario, y al pulsar el botón de paro se detiene. Al pulsar el segundo botón de arranque, el motor funciona a alta velocidad en sentido horario, y al pulsar nuevamente el botón de paro se detiene. Se requiere un bloqueo eléctrico para este proceso.
Practica 8 aut
Este documento describe una práctica para arrancar dos motores de forma programada. Al pulsar el botón de arranque 1, ninguno de los motores se enciende inicialmente. Luego, el motor 1 se enciende después de 15 segundos y el motor 2 después de 20 segundos. Al pulsar el botón de paro, ambos motores se detienen. Dos luces indicadoras muestran que los motores están funcionando.
Practica 1.5 aut
El documento describe una práctica en la que se muestra cómo un pistón entra y sale mediante un accionamiento mecánico, proporcionando una demostración visual del movimiento de un pistón impulsado por una fuerza mecánica.
Practica 1 aut.
Este documento describe cómo arrancar y detener un motor presionando botones. Al presionar el botón de arranque, se enclava el motor para que comience a funcionar, y al presionar el botón de paro, se detiene el motor.
Practica 5 aut.
Este documento describe una prueba de arranque forzado de 3 motores. Al pulsar el botón de arranque 1, entra el motor 1, y al pulsar el botón 2, entra el motor 2. Sin embargo, si el motor 1 no funciona, tampoco lo hará el motor 2. Al pulsar el botón 3, entra el motor 3, pero si el motor 2 no funciona, tampoco lo hará el motor 3. Además, el motor 1 no se detendrá hasta que salga el motor 2, y el motor 2 no saldrá hasta que lo haga el motor 3.
Practica 3 aut
Este documento describe cómo funciona el arranque y paro de un motor trifásico de dos sentidos de giro. Al pulsar el botón de arranque 1, el motor gira en sentido horario e indica que está encendido; al pulsar el botón de paro, el motor se detiene. Al pulsar el botón de arranque 2, el motor gira en sentido antihorario e indica que está encendido; al pulsar el botón de paro, el motor se detiene también.
leyenda, mito, copla,juego de palabras ,epopeya,cantar de gestas,corrido popu...
definicion, caracterisiticas y ejemplos de leyenda, fabula, copla, canter de gesta, fabula, corridos literarios
Más contenido relacionado
La actualidad más candente
Practica 9. Trabajo Alternado de 2 Motores
Los motores se encienden y apagan alternativamente después de un tiempo determinado usando temporizadores, mientras que el mismo botón de parada controla todos los motores.
Automatismos
El documento contiene esquemas eléctricos para el control y arranque de motores y otros dispositivos. Incluye esquemas para el encendido en cascada de lámparas, el arranque manual de tres motores trifásicos con contactores, el arranque de un motor trifásico con pulsadores de marcha y parada, y el control de dos contactores mediante interruptores. También presenta esquemas para la inversión del giro de motores trifásicos, el arranque y parada de varios motores, y el control de contactores de forma tempor
Cálculo martes 8 de mayo
La lección trata sobre calcular derivadas de funciones usando la regla de la cadena. Instruye a los estudiantes a derivar cinco funciones diferentes aplicando esta regla para encontrar la derivada de cada una.
AsignacióN 1 Mcii
El primer documento describe un semáforo de paso que funciona en modo intermitente hasta que un peatón presiona un botón para activar un semáforo en rojo durante 15 segundos. Se pide diseñar este semáforo usando un temporizador y una interrupción para el botón. El segundo documento pide diseñar un control para llenar un tanque de agua usando una bomba que se enciende y apaga dependiendo de los niveles mínimo y máximo, y no se activa si el depósito subterráneo alcanza un nivel de alarma
Sistemas automáticos
El documento describe los sistemas automáticos, específicamente los sistemas de lazo abierto y lazo cerrado. Explica que los sistemas de lazo cerrado son más flexibles y capaces de reaccionar si el resultado no es el esperado, mientras que los sistemas de lazo abierto como un riego por temporizador tienen una capacidad más limitada para tomar decisiones inteligentes.
S
Este documento describe un experimento para demostrar la presencia de campos magnéticos. Se construye un pequeño motor colocando un imán junto a una pila y conectando un trozo de alambre esmaltado para formar aspas. Cuando se colocan las aspas sobre la pila, estas comienzan a girar debido a la interacción entre el campo magnético del imán y la corriente eléctrica de la pila. El objetivo es demostrar de forma práctica la presencia de campos magnéticos y su uso para crear movimiento rot
Reporte 3 y 4
El documento describe dos circuitos eléctricos creados con un PLC como parte de una práctica de automatización de sistemas electromecánicos. El primer circuito usa dos botones cerrados para encender una lámpara, mientras que el segundo usa dos botones abiertos para lo mismo. Ambos circuitos fueron diseñados en el software Step 7 y probados físicamente usando botones, cables y una lámpara indicadora.
Practica # 6
Este documento describe una práctica de automatización de sistemas electromecánicos realizada por un alumno. La práctica involucra el uso de dos botoneras, cables banana-banana, un PLC y una lámpara indicadora para simular el encendido y apagado de un motor. Se incluyen diagramas que muestran la conexión de un arrancador de motores y el diagrama de conexión del PLC implementado en la práctica.
PROGRAMMING
El documento describe cómo programar un sensor de luz en NXT y sugiere agregar el sensor fotosensible a un modelo NXT para programar su comportamiento para que cambie cuando se active el sensor de luz. También menciona que el Robot Educador incluye la posibilidad de programar ideas utilizando el sensor fotosensible.
Manual de robotica parte 3
Este manual describe el uso de diferentes sensores para la robótica, incluyendo sensores táctiles, acústicos, fotosensibles y ultrasónicos. Explica cómo agregar y programar cada sensor para que un modelo cambie su comportamiento según la entrada del sensor, y cómo usar las funciones "Pruebeme", "Ver" y "Registro de datos" del NXT para probar y registrar la respuesta de los sensores.
La actualidad más candente (10)
Más de Jesus_ecdl
Practica 6 aut
Este documento describe cómo probar el arranque y paro de un motor trifásico de 6 puntas con 2 velocidades. Al pulsar el primer botón de arranque, el motor funciona a baja velocidad en sentido horario, y al pulsar el botón de paro se detiene. Al pulsar el segundo botón de arranque, el motor funciona a alta velocidad en sentido horario, y al pulsar nuevamente el botón de paro se detiene. Se requiere un bloqueo eléctrico para este proceso.
Practica 8 aut
Este documento describe una práctica para arrancar dos motores de forma programada. Al pulsar el botón de arranque 1, ninguno de los motores se enciende inicialmente. Luego, el motor 1 se enciende después de 15 segundos y el motor 2 después de 20 segundos. Al pulsar el botón de paro, ambos motores se detienen. Dos luces indicadoras muestran que los motores están funcionando.
Practica 1.5 aut
El documento describe una práctica en la que se muestra cómo un pistón entra y sale mediante un accionamiento mecánico, proporcionando una demostración visual del movimiento de un pistón impulsado por una fuerza mecánica.
Practica 1 aut.
Este documento describe cómo arrancar y detener un motor presionando botones. Al presionar el botón de arranque, se enclava el motor para que comience a funcionar, y al presionar el botón de paro, se detiene el motor.
Practica 5 aut.
Este documento describe una prueba de arranque forzado de 3 motores. Al pulsar el botón de arranque 1, entra el motor 1, y al pulsar el botón 2, entra el motor 2. Sin embargo, si el motor 1 no funciona, tampoco lo hará el motor 2. Al pulsar el botón 3, entra el motor 3, pero si el motor 2 no funciona, tampoco lo hará el motor 3. Además, el motor 1 no se detendrá hasta que salga el motor 2, y el motor 2 no saldrá hasta que lo haga el motor 3.
Practica 3 aut
Este documento describe cómo funciona el arranque y paro de un motor trifásico de dos sentidos de giro. Al pulsar el botón de arranque 1, el motor gira en sentido horario e indica que está encendido; al pulsar el botón de paro, el motor se detiene. Al pulsar el botón de arranque 2, el motor gira en sentido antihorario e indica que está encendido; al pulsar el botón de paro, el motor se detiene también.
Más de Jesus_ecdl (6)
Último
leyenda, mito, copla,juego de palabras ,epopeya,cantar de gestas,corrido popu...
definicion, caracterisiticas y ejemplos de leyenda, fabula, copla, canter de gesta, fabula, corridos literarios
EVALUACION ESTUDIANTIL 2023-2024 Ecuador - Costa.pptx
Actualización de la Gestión Educativa en el ecuador 2023
Examen de Selectividad. Geografía junio 2024 (Convocatoria Ordinaria). UCLM
Examen de Selectividad de la EvAU de Geografía de junio de 2023 en Castilla La Mancha. UCLM . (Convocatoria ordinaria)
Más información en el Blog de Geografía de Juan Martín Martín
http://blogdegeografiadejuan.blogspot.com/
Este documento presenta un examen de geografía para el Acceso a la universidad (EVAU). Consta de cuatro secciones. La primera sección ofrece tres ejercicios prácticos sobre paisajes, mapas o hábitats. La segunda sección contiene preguntas teóricas sobre unidades de relieve, transporte o demografía. La tercera sección pide definir conceptos geográficos. La cuarta sección implica identificar elementos geográficos en un mapa. El examen evalúa conocimientos fundamentales de geografía.
Lecciones 10 Esc. Sabática. El espiritismo desenmascarado docx
El espiritismo, se puede usar para engañar.
Examen de Lengua Castellana y Literatura de la EBAU en Castilla-La Mancha 2024.
Examen de Lengua Castellana y Literatura de la EBAU en Castilla-La Mancha 2024.
Manual de procedimiento para gráficos HC
Manual de usuario para elaborar gráficos en Hoja de cálculo de Google.
Último (20)
leyenda, mito, copla,juego de palabras ,epopeya,cantar de gestas,corrido popu...
leyenda, mito, copla,juego de palabras ,epopeya,cantar de gestas,corrido popu...
Las Tecnologias Digitales en los Aprendizajesdel Siglo XXI UNESCO Ccesa007.pdf
Las Tecnologias Digitales en los Aprendizajesdel Siglo XXI UNESCO Ccesa007.pdf
Docentes y el uso de chatGPT en el Aula Ccesa007.pdf
Docentes y el uso de chatGPT en el Aula Ccesa007.pdf
EVALUACION ESTUDIANTIL 2023-2024 Ecuador - Costa.pptx
EVALUACION ESTUDIANTIL 2023-2024 Ecuador - Costa.pptx
Examen de Selectividad. Geografía junio 2024 (Convocatoria Ordinaria). UCLM
Examen de Selectividad. Geografía junio 2024 (Convocatoria Ordinaria). UCLM
Guia para Docentes como usar ChatGPT Mineduc Ccesa007.pdf
Guia para Docentes como usar ChatGPT Mineduc Ccesa007.pdf
3° SES COMU LUN10 CUENTO DIA DEL PADRE 933623393 PROF YESSENIA (1).docx
3° SES COMU LUN10 CUENTO DIA DEL PADRE 933623393 PROF YESSENIA (1).docx
665033394-TODAS-LAS-SANGRES-resumen-Por-Capitulos.pdf
665033394-TODAS-LAS-SANGRES-resumen-Por-Capitulos.pdf
Lecciones 10 Esc. Sabática. El espiritismo desenmascarado docx
Lecciones 10 Esc. Sabática. El espiritismo desenmascarado docx
Examen de Lengua Castellana y Literatura de la EBAU en Castilla-La Mancha 2024.
Examen de Lengua Castellana y Literatura de la EBAU en Castilla-La Mancha 2024.
CONTENIDOS Y PDA DE LA FASE 3,4 Y 5 EN NIVEL PRIMARIA
CONTENIDOS Y PDA DE LA FASE 3,4 Y 5 EN NIVEL PRIMARIA
Practica 2 aut.
- 1. PRACTICA 2 Aquí se demuestra un arranque secuencial de 3 motores mediante enclavamientos si uno no trabaja secuencialmente el otro tampoco. Al pulsar botón de paro se detienen los 3 motores.