La práctica 3 describe cómo el robot puede detectar sonidos y controlar su movimiento en respuesta. Detectará sonidos y se detendrá, y esperará dos segundos después de una palmada para avanzar o retroceder. La práctica 4 explica cómo el robot puede controlar su distancia y detectar distancias, avanzando sin límites hasta los 20 cm y luego avanzando dos rotaciones hasta estar a menos de 20 cm antes de retroceder.
El análisis PESTEL es una herramienta estratégica que examina seis factores clave del entorno externo que podrían afectar a una empresa: políticos, económicos, sociales, tecnológicos, ambientales y legales.
Guía para hacer un Plan de Negocio para tu emprendimiento.pdfpppilarparedespampin
Esta Guía te ayudará a hacer un Plan de Negocio para tu emprendimiento. Con todo lo necesario para estructurar tu proyecto: desde Marketing hasta Finanzas, lo imprescindible para presentar tu idea. Con esta guía te será muy fácil convencer a tus inversores y lograr la financiación que necesitas.
PREVENCION DELITOS RELACIONADOS COM INT.pptxjohnsegura13
Concientizar y sensibilizar a los funcionarios, sobre la importancia de promover la seguridad en sus operaciones de comercio internacional, mediante la unificación de criterios relacionados con la trazabilidad de sus operaciones.
Anna Lucia Alfaro Dardón, Harvard MPA/ID. The international successful Case Study of Banco de Desarrollo Rural S.A. in Guatemala - a mixed capital bank with a multicultural and multisectoral governance structure, and one of the largest and most profitable banks in the Central American region.
INCAE Business Review, 2010.
Anna Lucía Alfaro Dardón
Dr. Ivan Alfaro
Dr. Luis Noel Alfaro Gramajo
Anna Lucia Alfaro Dardón, Harvard MPA/ID.
Opportunities, constraints and challenges for the development of the small and medium enterprise (SME) sector in Central America, with an analytical study of the SME sector in Nicaragua. - focused on the current supply and demand gap for credit and financial services.
Anna Lucía Alfaro Dardón
Dr. Ivan Alfaro
SMEs as Backbone of the Economies, INCAE Business Review 2010
Practica 3
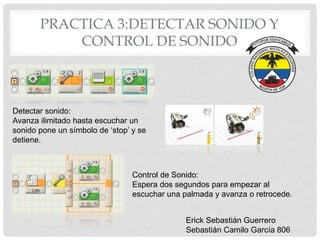
1. PRACTICA 3:DETECTAR SONIDO Y
CONTROL DE SONIDO
Detectar sonido:
Avanza ilimitado hasta escuchar un
sonido pone un símbolo de ‘stop’ y se
detiene.
Control de Sonido:
Espera dos segundos para empezar al
escuchar una palmada y avanza o retrocede.
Erick Sebastián Guerrero
Sebastián Camilo García 806
2. PRACTICA4: CONTROL DE DISTANCIA Y
DETECTAR DISTANCIA
Control de sonido:
Avanza ilimitadamente hasta detectar una
distancia menor a 20 cm
Detectar distancia:
Avanza dos rotaciones hasta estar a
una distancia menor de 20 cm, al estar
cerca retrocede.
Erick Sebastián Guerrero
Sebastián Camilo García 806