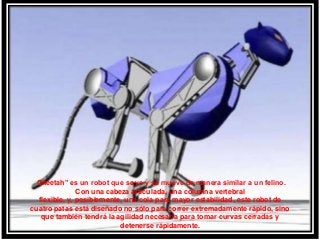
1. “Cheetah” es un robot que se ve y se mueve de manera similar a un felino.
Con una cabeza articulada, una columna vertebral
flexible, y, posiblemente, una cola para mayor estabilidad, este robot de
cuatro patas está diseñado no sólo para correr extremadamente rápido, sino
que también tendrá la agilidad necesaria para tomar curvas cerradas y
detenerse rápidamente.
2. robots móviles están provistos de patas, ruedas u orugas que los capacitan para
desplazarse de acuerdo a su programación. Elaboran la información que reciben a
través de sus propios sistemas de sensores y se emplean en determinado tipo de
instalaciones industriales, sobre todo para el transporte de mercancías en
cadenas de producción y almacenes. También se utilizan robots de este tipo para
la investigación en lugares de difícil acceso o muy distantes, como es el caso de
la exploración espacial y de las investigaciones o rescates submarinos.
3. Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a
los androides, constituyen una clase caracterizada principalmente por sus sistemas de
locomoción que imitan a los diversos seres vivos.
4. Los teleoperadores se controlan remotamente por un operador humano.
Cuando pueden ser considerados robots se les llama "telerobots".
Cualquiera que sea su clase, los teleoperadores son generalmente muy
sofisticados y extremadamente útiles en entornos peligrosos tales como
residuos químicos y desactivación de bombas.
5. Los androides son artilugios que se parecen y actúan como seres humanos. Los robots de
hoy en día vienen en todas las formas y tamaños, pero a excepción de los robots que
aparecen en las ferias y espectáculos, no se parecen a las personas y por tanto no son
androides. Actualmente, los androides reales sólo existen en la imaginación y en las
películas de ficción.
6. Androide programable Nao
Un pequeño androide (57 centímetros) que es capaz de andar, reconocer y
coger cosas y comunicarse en ocho idiomas. Y además… ¡es “open source”!
Es decir que pueden desarrollarse nuevos programas para ellos. De momento
existen programas para informarnos del tiempo que hará ese día o que
permiten sintonizar diferentes emisoras de radio de internet.
7. El robot Ciclista
Este modelo, creado por Masahito Yamaguchi, además de replicar las
funciones motoras del ser humano, es capaz de mantener el
equilibrio, detectar y girar en las curvas y hasta frenar utilizando los
pies para ello. Otros modelos más manejables, como el “Murata boy”, es
capaz de hacer lo mismo, aunque en una escala más reducida.
8. El robot campeón de triatlón
El Evolta, creado por Panasonic, avanza haciendo girar una rueda y es capaz
de detectar obstáculos. Pero lo mejor es su durabilidad: el robot fue capaz de
completar el Triatlón del hombre de hierro de Hawai, y andar y nadar durante
230 kilómetros de manera ininterrumpida. Es la cuarta ocasión en la que se
ponen a prueba este mecanoide y siempre ha obtenido estupendos resultados.
9. El robot que te prepara el desayuno
Científicos americanos y alemanes se unieron para conseguir que este
mecanoide sea capaz de examinar los objetos y elegir los
ingredientes, aprender la disposición de la cocina y, finalmente, preparar un
desayuno alemán, con salchichas y todo. Todo ello con biblioteca de
reconocimiento de objetosopen source.
10. Industriales: los robots de este tipo pueden ser electrónicos o mecánicos y
se los utiliza para la realización de los procesos de manipulación o
fabricación automáticos. También se les llama robots industriales a
aquellos electrodomésticos que realizan simultáneamente distintas
operaciones.