Como crear un robot de sumo autónomo y barato
•Descargar como DOCX, PDF•
2 recomendaciones•15,814 vistas


Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Como crear un robot de sumo autónomo y barato
Similar a Como crear un robot de sumo autónomo y barato (20)
Como crear un robot de sumo autónomo y barato
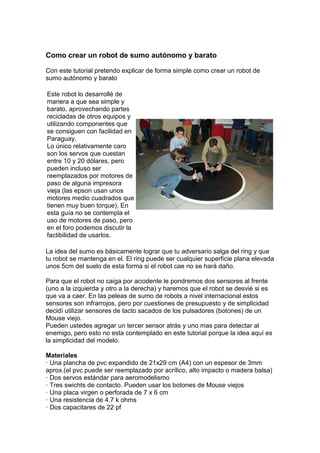
- 1. Como crear un robot de sumo autónomo y barato Con este tutorial pretendo explicar de forma simple como crear un robot de sumo autónomo y barato Este robot lo desarrollé de manera a que sea simple y barato, aprovechando partes recicladas de otros equipos y utilizando componentes que se consiguen con facilidad en Paraguay. Lo único relativamente caro son los servos que cuestan entre 10 y 20 dólares, pero pueden incluso ser reemplazados por motores de paso de alguna impresora vieja (las epson usan unos motores medio cuadrados que tienen muy buen torque). En esta guía no se contempla el uso de motores de paso, pero en el foro podemos discutir la factibilidad de usarlos. La idea del sumo es básicamente lograr que tu adversario salga del ring y que tu robot se mantenga en el. El ring puede ser cualquier superficie plana elevada unos 5cm del suelo de esta forma si el robot cae no se hará daño. Para que el robot no caiga por accidente le pondremos dos sensores al frente (uno a la izquierda y otro a la derecha) y haremos que el robot se desvié si es que va a caer. En las peleas de sumo de robots a nivel internacional estos sensores son infrarrojos, pero por cuestiones de presupuesto y de simplicidad decidí utilizar sensores de tacto sacados de los pulsadores (botones) de un Mouse viejo. Pueden ustedes agregar un tercer sensor atrás y uno mas para detectar al enemigo, pero esto no esta contemplado en este tutorial porque la idea aquí es la simplicidad del modelo. Materiales · Una plancha de pvc expandido de 21x29 cm (A4) con un espesor de 3mm aprox.(el pvc puede ser reemplazado por acrílico, alto impacto o madera balsa) · Dos servos estándar para aeromodelismo · Tres swichts de contacto. Pueden usar los botones de Mouse viejos · Una placa virgen o perforada de 7 x 6 cm · Una resistencia de 4.7 k ohms · Dos capacitares de 22 pf
- 2. · Un regulador de voltaje de 5v LM78L05 o similar · Un cristal de 4Mhz · Un zócalo de 18 pines para el PIC · Un PIC 16F84 · Un porta pilas para 4 pilas AA · Dos ruedas de 5 a 7 cm de diámetro · 12 Tornillos de 2,5mm x 2cm con tuercas y arandelas · 6 Tornillos de 2mm x 1,5cm con tuercas y arandelas Primera parte - Armado del robot - Paso 1 - corte de piezas Cortar las partes en el PVC de acuerdo a la plantilla Para cortar se puede usar un cutter o alguna sierra, recomiendo usar cutter por que queda mas uniforme y pulcro. También se puede lijar el material para darle una mejor terminación. (clic en la imagen para ver en tamaño real) Paso 2 - pegado de piezas Pegar todas las partes con algún pegamento a base de cianoacrilato (la gotita) como se ve en la figura:
- 3. Una vez pegadas las partes debe quedar como se ve en la imagen. Luego pegar las dos cuñas para formar las palas como se ilustra en el imagen Paso 3 - armado del robot fijar las palas con tornillos, arandelas y tuercas a la estructura del robot como se ve en la imagen.
- 4. Fijar los servos con tornillos y tuercas y colocarle las ruedas como se ve en la imagen Para poder colocar las ruedas hay que utilizar alguno de los accesorios que viene con el servo, dependiendo de la rueda que tengamos esta tarea puede ser simple o complicada. Los servos tienen que estar modificados para rotación continua como se explica aquí. Cuando ya este todo armado hay que regular las dos palas de forma que queden al ras del piso, ya que ahí se fijaran los sensores de tacto. Fijar los sensores con tornillos de 2 mm como se ve en la imagen y luego fijar la patita que hará contacto con el piso. De modo que quede como se ve en la foto mas abajo
- 5. Como crear un robot de sumo autónomo y barato Segunda parte - La Electronica - Montar en un PCB los componentes de la siguiente manera. En este PDF tienen la matriz para quemar su PCB Luego conectar los servos como se indica en el diagrama, es importante tener en cuenta que los servos consumen algo de corriente con lo que no es recomendable alimentarlos con los 5v entregados por el regulador, sino directamente desde las cuatro pilas AA (4,8v a 6v) Para conectar los sensores deben guiarse por el siguiente diagrama, tener en cuenta que se deben usar los tres terminales de los pulsadores de modo a evitar que el pin del pic quede al aire, ya que esto puede causar que el programa dentro del micro actúe en forma errática. También pueden evitar esto usando una resistencia de 10k como pull-up entre el positivo y el pin de entrada o programando dentro del código del pic que se utilicen las resistencias pull-up internas
- 6. Si desean pueden reemplazar los sensores de contacto(pulsadores de mouse) por sensores infrarrojos usando los CNY70 como se indica en esta sección. Utilizando sensores infrarrojos el robot detectará el borde del ring antes, ya que la franja blanca del borde está a unos 5 cm del borde, sin embargo usando los contactos, el robot deberá llegar al borde para detectarlo. En la foto podemos ver como queda la plaquita (no con muy buena terminación en este caso), le agregue los conectores que se ven abajo para poder conectar con mas facilidad los servos y los sensores, esos conectores los saque de una placa madre vieja de PC, pero se consiguen con facilidad en cualquier casa de electrónica Como crear un robot de sumo autónomo y barato Tercera parte - El programa - El programa para este robot es muy básico, queda a criterio de ustedes mejorarlo para darle mas inteligencia o aumentar las prestaciones. El programa básicamente tiene que revisar periódicamente los sensores ubicados al frente del robot para ver de no salir del ring. Si el sensor de la derecha detecta que el ring se acabo el robot rotará a la izquierda y viceversa , si ambos sensores detectan que no hay mas
- 7. mesa, el robot retrocederá y luego rotará A continuación se ve el diagrama de flujo del código principal. En este archivo esta el programa compilado listo para ser grabado en el pic y el código en asembler por si quieran modificar algo. Ahora es cuestión de grabar el programa en el pic, conectar las baterías y empezar a probar. Con esto doy por terminado el tutorial, cualquier consulta la pueden hacer en este post de nuestro foro. Por si les sea de interés esto es lo que me costo hacer el robot:
- 8. Como conectar un sensor infrarrojo CNY70 a un pic de forma simple El CNY70 es un pequeño dispositivo con forma de cubo y cuatro patitas que tiene en su interior un diodo emisor de infrarrojos y un fototransistor en paralelo y apuntando ambos en la misma El la siguiente figura vemos la disposición interna del CNY70 mirando el encapsulado desde arriba, ahí se ve el diodo emisor de infrarrojos a la izquierda y el fototransistor a la derecha. Con solo 4 resistencias y un transistor es fácil conectar un CNY70 a un microcontrolador, este sensor es muy usado en robots seguidores de líneas y en robots de sumo para detectar el borde del ring Con este circuito cuando la superficie es negra el pin esta en high (1) y
- 9. cuando es blanca se pone en low (0), es sensible hasta 1 cm de distancia de la superficie