
Recomendados
Más contenido relacionado
Similar a control de motores./Fundamentos de los sistemas de control
Similar a control de motores./Fundamentos de los sistemas de control (20)
control de motores./Fundamentos de los sistemas de control
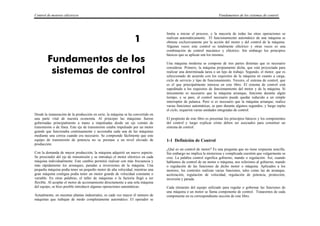
- 1. Control de motores eléctricos Fundamentos de los sistemas de control Desde la instauración de la producción en serie, la máquina se ha convertido en una parte vital de nuestra economía. Al principio las máquinas fueron gobernadas principalmente a mano a impulsadas desde un eje común de transmisión o de línea. Este eje de transmisión estaba impulsado por un motor grande que funcionaba continuamente y accionaba cada una de las máquinas mediante una correa cuando era necesario. Se comprende fácilmente que este equipo de transmisión de potencia no se prestase a un nivel elevado de producción. Con la demanda de mayor producción, la máquina adquirió un nuevo aspecto. Se prescindió del eje de transmisión y se introdujo el motor eléctrico en cada máquina individualmente. Este cambio permitió realizar con más frecuencia y más rápidamente los arranques, paradas a inversiones de la máquina. Una pequeña máquina podía tener un pequeño motor de alta velocidad, mientras una gran máquina contigua podía tener un motor grande de velocidad constante o variable. En otras palabras, el taller de máquinas o la factoría llegó a ser flexible. Al acoplar el motor de accionamiento directamente a una sola máquina del equipo, se hizo posible introducir algunas operaciones automáticas. Actualmente, en nuestras plantas industriales, es cada vez mayor él número de máquinas que trabajan de modo completamente automático. El operador se limita a iniciar el proceso, y la mayoría de todas las otras operaciones se realizan automáticamente. El funcionamiento automático de una máquina se obtiene exclusivamente por la acción del motor y del control de la máquina. Algunas veces este control es totalmente eléctrico y otras veces es una combinación de control mecánico y eléctrico. Sin embargo los principios básicos quo se aplican son los mismos. Una máquina moderna se compone de tres partes distintas que es necesario considerar. Primero, la máquina propiamente dicha, que está proyectada para realizar una determinada tarea o un tipo de trabajo. Segundo, el motor, que es seleccionado de acuerdo con los requisitos de la máquina en cuanto a carga, ciclo de servicio y tipo de funcionamiento. Tercero, el sistema de control, que es el que principalmente interesa en este libro. El sistema de control está supeditado a los requisitos de funcionamiento del motor y de la máquina. Si únicamente es necesario que la máquina arranque, funcione durante algún tiempo, y se pare, el control necesario puede quedar reducido a un simple interruptor de palanca. Pero si es necesario que la máquina arranque, realice varias funciones automáticas, se pare durante algunos segundos, y luego repita el ciclo, requerirá varias unidades integradas de control. El propósito de este libro es presentar los principios básicos y los componentes del control y luego explicar cómo deben ser asociados para constituir un sistema de control. 1-1 Definición de Control ¿Qué es un control de motor? Es una pregunta que no tiene respuesta sencilla. Sin embargo no implica la misteriosa y complicada cuestión que vulgarmente se cree. La palabra control significa gobierno, mando o regulación. Así, cuando hablamos de control de un motor o máquina, nos referimos al gobierno, mando o regulación de las funciones de dicho motor o máquina. Aplicados a los motores, los controles realizan varias funciones, tales como las de arranque, aceleración, regulación de velocidad, regulación de potencia, protección, inversión y parada. Cada elemento del equipo utilizado para regular o gobernar las funciones de una máquina o un motor se llama componente de control. Trataremos de cada componente en su correspondiente sección de este libro. 1 Fundamentos de los sistemas de control
- 2. Control de motores eléctricos Fundamentos de los sistemas de control Un controlador eléctrico es un dispositivo o grupo de dispositivos que controla o regula las funciones de un motor o una máquina de manera predeterminada o en un orden de sucesión o secuencia asimismo predeterminado. Panel de la red Protección del circuito Arrancador manual Protección en funcionamiento Motor Línea Fig. 1-1 Control manual de un motor. 1-2 Control Manual El control manual es una forma de mando o regulación que se ejecuta manualmente en el mismo lugar en que está situado el dispositivo de control (fig. 1-1). El más sencillo y conocido es probablemente el arrancador manual de pequeños motores a tensión nominal. Se utiliza frecuentemente este arrancador donde sólo es necesario la función de control para la puesta en marcha y parada del motor. Probablemente la principal razón de la popularidad de esta unidad es que su coste es aproximadamente la mitad del de un arrancador electromagnético equivalente. El arrancador manual proporciona generalmente protección contra la sobrecarga (Sec. 2-71 y desenganche de tensión mínima (Sec. 2-12), pero no protección contra baja tensión. El control manual que provee las mismas funciones que las obtenidas por el arrancador manual de motor a plena tensión se puede obtener utilizando un interruptor con fusible del tipo de acción retardada, que proporciona la protección del motor contra sobrecargas. Abunda mucho este tipo de control en talleres pequeños de metalistería y carpintería, en que se utilizan pequeñas máquinas de taladrar, tornos y máquinas para roscar tubos. También se utiliza en los ventiladores de extracción instalados en salas de máquinas y utilizados en ciertos procesos industriales. En estas instalaciones el operador o el operario encargado del mantenimiento, empuja generalmente el botón de puesta en marcha del ventilador por la mañana cuando se abre el taller, y continua funcionando durante todo el día. Por la noche, o cuando se cierra el taller, el operador empuja el botón parada, y el ventilador deja de funcionar hasta que se le necesita nuevamente. Las máquinas de soldar del tipo de motor-generador son un ejemplo de esta clase de control y serán conocidas de la mayoría de estudiantes del control de motores. El arranque manual a tensión reducida mediante autotransformador se emplea extensamente para controlar los motores polifásicos de jaula en los que se requiere el arranque a tensión reducida siendo las funciones necesarias de control solamente las de arranque y parada. Este tipo de arrancador suele llevar incorporada protección contra la sobrecarga, desenganche por tensión nula y protección contra baja tensión. El arrancador tipo autotransformador se utiliza muy frecuentemente asociado a un combinador tipo tambor con resistencias de arranque en los motores de rotor bobinado (fig. 1-2). Esta combinación da un completo control manual de arranque, parada, velocidad y sentido de giro. Estos autotransformadores para el arranque a tensión reducida, se utilizan generalmente en los motores de gran potencia, siendo frecuente su uso junto con un combinador de tambor con resistencias conectadas al rotor en los motores que accionan turbocompresores usados en equipos de acondicionamiento de aire. El arranque a tensión reducida permite al motor vencer la inercia del turbocompresor durante el período de arranque sin absorber una intensidad excesiva. El combinador de tambor junto con las resistencias permite regular la velocidad de un motor de rotor bobinado, que acoplado al turbo compresor permite variar el caudal de aire acondicionado, confiriéndole una flexibilidad que no sería posible obtener con una instalación de velocidad constante.
- 3. Control de motores eléctricos Fundamentos de los sistemas de control Panel de la red Control primario Línea Motor rotor de anillos Cambiador tipo tambor Resistencias rotor Fig. 1-2 Control de un motor con rotor de anillos. Existen algunos controladores manuales cuya clasificación presentaría alguna dificultad a causa de que realizan también funciones de control que no son automáticas. El control manual se caracteriza por el hecho de que el operador debe mover un interruptor o pulsar un botón para que se efectúe cualquier cambio en las condiciones de funcionamiento de la máquina o del equipo en cuestión. 1-3 Control Semiautomático Los controladores que pertenecen a esta clasificación utilizan un arrancador electromagnético y uno o más dispositivos pilotos manuales tales como pulsadores, interruptores de maniobra, combinadores de tambor o dispositivos análogos (fig. 1-3). Probablemente los mandos más utilizados son los cuadros de pulsadores a causa de que constituyen una unidad compacta y relativamente económica. El control semiautomático se emplea principalmente para facilitar las maniobras de mando y dar flexibilidad a las maniobras de control en aquellas instalaciones en las que el control manual no es posible. La clave de la clasificación como sistema de control semiautomático es el hecho de que los dispositivos piloto son accionados manualmente y de que el arrancador del motor es de tipo electromagnético. Probablemente hay más máquinas manipuladas por control semiautomático que por control manual o automático. Este tipo de control requiere un operador que inicie cualquier cambio en la posición o condición de funcionamiento de la máquina. Mediante el uso del arrancador electromagnético puede realizarse este cambio desde un lugar o puesto de trabajo cómodo o necesario, lo que no es posible con el control manual que debe maniobrarse en el mismo lugar en que está situado el arrancador. Panel de la red Arrancador electromagnético Línea Pulsadores remotos Motor Fig. 1-3 Control semiautomático de un motor.
- 4. Control de motores eléctricos Fundamentos de los sistemas de control 1-4 Control Automático Un control automático está formado fundamentalmente por un arrancador electromagnético o contactor cuyas funciones están controladas por uno o más dispositivos piloto automáticos (flg. 1-4). La orden inicial de marcha puede ser automática, pero generalmente es una operación manual, realizada en un panel de pulsadores o interruptores. Panel de la red Arrancador electromagnético Línea Pulsador Motor Interruptor final de carrera Interruptor de flotador Fig. 1-4 Control automático de un motor. En algunos casos puede haber una combinación de dispositivos manuales y automáticos en un circuito de control. Si el circuito contiene uno o más dispositivos automáticos, debe ser clasificado como control automático. Por ejemplo, consideremos un depósito que debe mantenerse lleno de agua entre límites definidos y una bomba para reponer el agua cuando sea necesario. Si equipamos el motor de la bomba con un arrancador manual y utilizamos un operario para que lo accione cuando sea necesario, tendremos un control manual. Supongamos que ahora sustituimos el arrancador manual por un arrancador electromagnético y disponemos un panel de pulsadores en el pupitre del capataz. Si mediante un timbre se le avisa cuando el agua ocupa el nivel inferior y el nivel superior, a la vez que realiza su propio trabajo, también podrá accionar el pulsador correspondiente cada vez que suene el timbre. Esto sería un control semiautomático. Supongamos ahora que instalamos un interruptor de flotador que cierra el circuito cuando el agua llega al nivel bajo previamente determinado y lo abre cuando alcanza el nivel alto también predeterminado. Cuando el agua llega al límite inferior, el interruptor del flotador cerrará el circuito y pondrá en marcha al motor. El motor funcionará hasta que el agua alcance el nivel superior, y en este instante el interruptor de flotador abrirá el circuito y parará el motor. Esto sería un control automático. Muchas veces se cree que un sistema automático resultará más caro que cualquiera de los otros dos, pero si se tiene en cuenta que se ahorra el trabajo de un operario, bien puede resultar este método más ventajoso. También se tendrá en cuenta que el control automático resultará más exacto a causa de que no hay retraso entre el instante en que el agua llega al nivel deseado y el cierre o la apertura del circuito de control. Los sistemas automáticos de control se encuentran en casi todas las instalaciones de máquinas herramienta. Las prensas, las fresadoras, las limadoras, los tornos revólver, máquinas herramienta de precisión y casi todas las máquinas actuales de use común, en que se emplean interruptores limitadores y otros dispositivos automáticos, realizan sus operaciones con más rendimiento y más rápidamente gracias al use de sistemas automáticos de control. Resumen La diferencia fundamental entre el control manual, el semiautomático y el automático estriba en la facilidad y comodidad de maniobra del sistema. Con control manual el operador tiene que estar situado en el lugar del arrancador para efectuar cualquier cambio en el funcionamiento de la máquina. Con control semiautomático el operador puede estar situado en un lugar conveniente para poder iniciar los cambios de funcionamiento en la posición más cómoda. Con control automático no es necesario que el operador inicie los cambios en el funcionamiento automático, porque esta función está incluida en el sistema de control.
- 5. Control de motores eléctricos Diagnóstico de averías en los circuitos de control R.L. Mc.Intyre El diagnóstico de averías en los equipos de control establece una línea divisoria entre los técnicos expertos y quienes no lo son. Se puede ser capaz de cablear perfectamente un nuevo circuito de control de acuerdo con el esquema del circuito, y no saber determinar la causa de que, una vez instalado, no funcione según lo previsto. El diagnóstico de averías requiere poseer sólidos conocimientos de las funciones de control y de sus componentes, así como de los circuitos y del análisis de éstos. El secreto de la eficiencia y seguridad en el diagnóstico radica en localizar la sección del circuito de control que contiene al componente defectuoso y luego determinar con precisión el componente que debe ser verificado. Esto sólo se logra analizando lógica y sistemáticamente el circuito, y no por tanteos o pruebas y verificaciones en distintos puntos de las conexiones o en componentes elegidos arbitrariamente. 9-1 Procedimiento General Consideremos primero un nuevo circuito que acaba de ser alambrado pero no funciona como se esperaba. Existe la posibilidad de que los conductores hayan sido mal conectados o de que el circuito no estuviese correctamente proyectado. Si revisamos una a una todas las conexiones del cableado, lo que haremos realmente es seguir el proceso de tanteos, lo que generalmente requiere invertir un tiempo considerable. La primera operación a realizar deberá consistir en analizar el circuito para determinar si ha sido correctamente proyectado para realizar las funciones previstas. La segunda operación será comprobar ordenadamente el funcionamiento de cada sección del equipo hasta encontrar la que no funciona correctamente. Una vez localizada la sección del circuito que produce la avería, será fácil verificar las conexiones y el funcionamiento de sus componentes y determinar cuál es la causa de la avería. Este proceso requiere el uso de los conocimientos de análisis de circuitos y de sus componentes y de sus funciones correctas para determinar si funcionan o no como deben. Si se desconocen, aunque sólo sea parcialmente, las funciones de control, los componentes o los circuitos, o no se saben analizar bien éstos conducirá a una pérdida de tiempo en el diagnóstico de la avería. Una vez localizada la avería en esta sección del circuito de control, y remediada aunque sólo sea provisionalmente, se seguirá la secuencia del funcionamiento para comprobar que éste ha quedado restablecido normalmente, y que no hay ninguna otra sección de circuito que funcione mal. Cuando se trata de diagnosticar la avería en un circuito ya existente, generalmente se puede descartar la posibilidad de que haya conexiones equivocadas, ya que si el circuito estuviese incorrectamente conectado, no hubiese funcionado originalmente. Sin embargo, es sorprendente que muchos especialistas inicien su proceso de diagnóstico verificando el alambrado, conexión por conexión, para determinar si está correctamente establecido. Este procedimiento es una desconsideración para el propietario de la instalación y el operador de la máquina, quienes están interesados en que la reparación se efectúe rápida y eficientemente y no en que sirva de experimentación con la consiguiente pérdida de tiempo. La primera operación para localizar una avería producida en un circuito ya existente es estudiar el circuito y el funcionamiento de la máquina que controla. Cuando se trata de circuitos complicados, generalmente el reparador o el diagnosticador de la avería no dispone del tiempo necesario pare estudiar el circuito completo. No obstante, con ayuda del operador se puede determinar cuál es la parte del circuito que funciona normalmente. Hay que seguir los ciclos de la máquina hasta llegar al punto en que el funcionamiento no es correcto. Una vez determinado este punto, se puede analizar el circuito empezando por la sección que no funciona. Una verificación cuidadosa de este circuito y la localización de los componentes incluidos en sección conducirá generalmente a la fuente de la avería que se busca. El mal funcionamiento de algún componente de control debe ser causa de fallo del circuito. 9 Diagnóstico de averías de los circuitos de control
- 6. Control de motores eléctricos Diagnóstico de averías en los circuitos de control R.L. Mc.Intyre En el caso raro en que la rotura del aislamiento sea la causa de la avería, esto se evidenciará en la inspección visual de los componentes y de las conexiones. Sin embargo, es muy frecuente que haya derivación a masa en un hilo del circuito de control y no darse cuenta de ello en la inspección visual si se sospecha que una derivación a masa o tierra es causa de la avería; se deberán efectuar verificación estando desconectada la fuente de alimentación o red de energía. Se determina con un ohmetro la resistencia a masa o tierra de los hilos en esta sección particular del circuito de control. Supongamos que ahora ha quedado localizada la sección del circuito de control que parece ser causa de la avería. La primera operación será localizar los componentes incluidos en esta parte del circuito, entre los que encontraremos un relé, un contactor o algún otro dispositivo que sea activado por esta sección del control, debiendo comprobar si cada uno de estos elementos recibe la alimentación excitación correspondiente. Si el contactor o el relé no se cierra correctamente habrá que desconectar del circuito su bobina para hacer una verificación de la tensión. Los conductores que se conectaban a la bobina se conectan ahora a un voltímetro con el fin de comprobar si la tensión aplicada a la bobina era la correcta. Si el voltímetro indica que está aplica una tensión correcta, lo más probable es que la avería esté en los arrollamientos de la bobina. No se debe intentar verificar o medir tensión o la resistencia de la bobina estando conectada en el circuito ya que la realimentación y disposición de los distintos circuitos de control pueden originar falsas lecturas. Si se sospecha que la bobina está defectuosa, se desconecta circuito de la red y se verifica con el ohmetro la resistencia de la bobina, que debe ser muy baja si se mide con c.c. Si la bobina está cortada, se obtendrá una lectura de alta resistencia o de resistencia infinita en el ohmetro, lo que indica que hay que cambiar la bobina. Nunca se debe establecer juicio acerca del estado de la bobina basándose en el olor de ésta o en la evidencia visible de quemadura, y que no siempre se pueden apreciar estos síntomas. Supongamos que nuestra verificación de la tensión nos ha demostrado que la tensión no llega a la bobina en la secuencia de operación del circuito de control. Esto indica que algún contacto no cierra correctamente, por lo que el circuito de la bobina queda desactivado. Un cuidadoso estudio de esta sección del circuito de control ateniéndose a los principios establecidos en el capítulo 7 nos indicará fácilmente cuáles son los contactos que deben cerrar para que se excite esta bobina. Ahora habrá que localizar los componentes a que pertenecen estos contactos y poner nuevamente en marcha a la máquina en su secuencia, observando el funcionamiento del relé, interruptor de límite, de flotador, de presión a otro dispositivo a que pertenezcan estos contactos, para determinar si trabajan mecánicamente como deben hacerlo. Si este componente no funciona mecánicamente, esto indica dos posibilidades. La primera y más probable es que los contactos en cuestión no cierren correctamente o estén recubiertos de óxido de cobre o de otra materia aislante que impide el paso de la corriente por la bobina. La otra posibilidad es un circuito abierto debido a un hilo cortado, pero esto será la causa menos probable de avería. Una vez verificados los contactos y remediado el defecto, que probablemente radicará aquí, se pone nuevamente en funcionamiento el circuito de control con todas las bobinas conectadas, y si completa su secuencia, se procede a aplicar el procedimiento anterior a la sección siguiente del control que no funcione. El procedimiento expuesto está basado en años de experiencia y en la consideración de que los circuitos de control están constituidos esencialmente por dos cosas: contactos, que cierran y abren el circuito, y bobina que accionan a estos contactos. Si los contactos cierran y abren correctamente, también serán aplicadas o desconectadas las tensiones en las bobinas debidamente. Siendo esto así, el mal funcionamiento debe radicar en la propia bobina. Si los contactos no funcionan correctamente, el defecto estará en los contactos o en los conductores asociados por los que pasa la corriente desde el contacto hasta la bobina. La regla más importante en el diagnóstico de averías es cambiar sólo una cosa cada vez. Si se encuentra un juego de contactos del que se sospecha que no funciona correctamente, se corrige este defecto y se prueba nuevamente el circuito antes de cambiar cualquier otra cosa. Si se sospecha que una bobina está quemada o que puede ser causa de avería por otro motivo, se la repara o se la reemplaza y se prueba nuevamente el circuito antes de efectuar otros cambios. Una de las operaciones que más confusiones produce en el diagnóstico de averías es la del cambiar o corregir varias piezas sospechosas a la vez antes de probar el funcionamiento del circuito. Varios cambios efectuados a la vez pueden introducir averías que antes no existían. Ésta es una regla fundamental en el trabajo del diagnóstico de averías y de su cumplimiento depende el rendimiento en el trabajo. Es muy raro que varias piezas de una máquina queden completamente inservibles por desgaste al mismo tiempo. Por consiguiente, aunque la condición de los componentes de control en su conjunto sea precaria, lo probable es que sólo esté inutilizado un componente.
- 7. Control de motores eléctricos Diagnóstico de averías en los circuitos de control R.L. Mc.Intyre Si no se está familiarizado con la máquina cuya avería se trata de diagnosticar, no se debe subestimar la información del operador de la máquina en el proceso de determinar la causa de la avería. Su conocimiento del funcionamiento normal se puede aprovechar para evitar una pérdida de tiempo considerable al tratar de averiguar cómo funciona la máquina. También puede ser valiosa la información del operador para localizar los componentes que pueden estar ocultos por partes de la máquina, ya que probablemente él sabe dónde están. Resumiendo, el hacer uso de toda fuente de información de que se disponga acorta el tiempo necesario para localizar la avería. Todas las averías de los circuitos eléctricos de control no están causadas necesariamente por averías eléctricas. Es muy frecuente que el mal funcionamiento mecánico de algún componente sea la única causa de la avería, por lo que siempre se deben examinar los componentes sospechosos no solo de defectos eléctricos sino también mecánicos. Por último, hay que señalar que quien intente hacer el diagnóstico de averías de un equipo de control sin estar equipado con un ohmetro; un amperímetro y un voltímetro tiene que perder forzosamente mucho tiempo. Debe ser diestro y competente en el uso correcto de estos instrumentos y en la interpretación de las lecturas que con ellos puede obtener. Aunque no sea un hecho insólito el diagnóstico sin estos instrumentos, es indiscutible que el rendimiento en el trabajo se puede aumentar considerablemente por la correcta aplicación de estos instrumentos. 9-2 Diagnóstico de los Componentes de Control Todo lo que se pueda decir de los problemas individuales a que dan lugar los diversos componentes de control ha sido expuesto en el capítulo 8. Las recomendaciones hechas en este capítulo para el procedimiento de mantenimiento son idénticas a las que puedan hacerse para diagnosticar y reparar las averías de circuito. Asimismo, para el diagnóstico de los componentes individuales es necesario conocer su funcionamiento correcto y, a ser posible, las características de cada componente declaradas por el fabricante. Muchos de estos conocimientos se adquieren a fuerza de experiencia. El estudiante puede aprender mucho en las documentaciones a instrucciones de los fabricantes y procurando familiarizarse con los diversos componentes que estén a su alcance en el trabajo diario. 9-3 Procedimiento Paso a Paso Como aclaración del procedimiento explicado en la sección 9-1, consideraremos un circuito dado y determinaremos la causa probable de algunas de las averías que supondremos han ocurrido en este circuito. Fig. 9-1. Circuito control del compresor de una instalación de Acondicionamiento de aire. La figura 9-1 es el circuito de un compresor perteneciente a un equipo de acondicionamiento de aire. Los componentes que aparecen en el diagrama son los siguientes: la bobina CR es un relé de control. La bobina M1 es el arrancador para la bomba de agua fría. La bobina M2 es el arrancador para la bomba del agua del condensador. La bobina M3 es el arrancador para la bomba de aceite del compresor. La bobina M4 es el arrancador del motor del compresor. El contacto designado por T es un termostato que responde a la temperatura del retorno de agua fría. Su función es poner en marcha y bomba de agua del condensador cuando su temperatura alcanza valor predeterminado. El contacto designado por PS1 es un interruptor de presión del aceite cuya función es parar el compresor si falla la bomba de aceite y también impedir que arranque antes de que se haya obtenido una presión predeterminada del aceite. El contacto designado por PS1 es un interruptor de caudal en el sistema de tubería de agua fría. Su función es impedir que funcione el compresor siempre que no sea suficiente el caudal de agua del condensador en el serpentín.
- 8. Control de motores eléctricos Diagnóstico de averías en los circuitos de control R.L. Mc.Intyre Supongamos ahora que hay que diagnosticar una avería en este circuito. Lo primero que deberemos hacer será averiguar cuál es la avería que se ha producido en este circuito basándonos en las manifestaciones del propietario o del operador. Supongamos que nos dicen que la bomba de agua del condensador no arranca como debe. Entonces, por el estudio del esquema, podemos suponer que la sección del circuito del relé de control está funcionando correctamente que el contacto CR2 se cierra y que la bomba de agua fría funciona correctamente. En esta tercera línea del esquema debe haber, no obstante, algún defecto. En la verificación de los relés de sobrecarga es posible que determinemos que no se disparan. Suponiendo que así sea, a continuación verificaremos el termostato para comprobar si su contacto se cierra debidamente. A este respecto señalemos que la determinación del ajuste de este termostato y de la temperatura real del agua nos indicará si se debe abrir o cerrar. Supongamos que debido al paro de la máquina la temperatura del agua ha aumentado hasta un punto en que es necesario que estos contactos se cierren. Supongamos también que los contactos del termostato están cerrados. Entonces lo procedente es inspeccionar el arrancador de la bomba de agua fría para determinar si el contacto M1 se cierra cuando es activado este contactor. Si nuestra inspección de este arrancador indica que su contacto se cierra correctamente, a continuación desconectaremos los hilos de la bobina M2 y aplicaremos un ohmetro a la bobina para determinar si su conductor está o no cortado. Por el análisis precedente es casi seguro que esta bobina estaba cortada y en nuestro ejemplo supongamos que así ocurre. Antes de reemplazar esta bobina, deberá ser examinado el arrancador en cuanto concierne al funcionamiento mecánico. Determinamos que el brazo de contacto que sube y baja o bascula para mover los contactos no está agarrotado y que la tracción del muelle no es excesiva. Examinamos también las caras de las piezas polares magnéticas para ver que no han silo deformadas ni deterioradas por alguien al forzarlas o a consecuencia de las muchas operaciones de cierre del contactor. Cuando todos los problemas mecánicos han quedado eliminados, instalamos una nueva bobina en el arrancador. Será una buena práctica verificar la tensión en los extremos de los hilos que alimentan a esta bobina antes de ponerla en servicio. Esto se puede hacer conectando un voltímetro entre los extremos de dichos hilos y haciendo que el circuito de control funcione hasta este punto. Si la tensión es excesivamente baja o excesivamente alta, habrá que determinar la causa de este defecto. De lo contrario, se puede quemar la nueva bobina. Supongamos que este circuito no funciona mal en lo que a esto respecta, y que según nos informan todo funcionaba bien excepto el compresor. Entonces activaremos el circuito y observaremos su secuencia para determinar por nosotros mismos dónde está el fallo. Debemos comprobar que el relé de control funciona, la bomba de agua fría arranca, la bomba de agua del condensador arranca y también la bomba de aceite del compresor arranca. Supondremos que aquí termina la secuencia y que el compresor no funciona correctamente. Examinamos nuevamente el circuito correspondiente a M4 y encontramos que posee un contacto accionado por el contactor de la bomba de aceite que puede ser causa de avería, así como también un interruptor de presión y dos interruptores de caudal. Nuevamente debemos determinar cuál de estos componentes no funciona correctamente. Si estos componentes son fácilmente accesibles, la inspección visual de cada uno de ellos puede revelarnos inmediatamente cuál es el defectuoso. Sin embargo, si son inaccesibles, un buen procedimiento a seguir es desconectar el circuito de control para determinar si llega tensión a la bobina, descartando así la posibilidad de que la avería esté en la bobina. Supongamos que el contacto M3 funciona correctamente y que lo hemos comprobado. También hemos comprobado que los dos interruptores de caudal funcionan correctamente y que sus contactos cierran. Entonces lo único que queda por verificar es el interruptor de presión. En algunos casos puede ser necesario volver a calibrar los interruptores de presión con presiones conocidas para comprobar que funcionan con los valores de ajuste indicados en sus cuadrantes. Nuevamente lo procedente será inspeccionar físicamente y determinar la causa real de que no funcione esta parte correctamente. Resumen Aunque este procedimiento pueda parecer excesivamente simplificado, es un ejemplo de cómo se sigue el esquema para diagnosticar la avería supuesta y puede servir de guía en la práctica. Independientemente de la complejidad que pueda haber en el circuito de control, se le puede separar en ramas individuales tales como las que aquí y en otras
- 9. Control de motores eléctricos Diagnóstico de averías en los circuitos de control R.L. Mc.Intyre secciones de este libro nos han servido de ejemplo. Un diagnosticador experto sabrá separar en ramas sencillas un circuito por muy complicado que sea hasta llegar a localizar él componente defectuoso de la manera que aquí hemos explicado. Preguntas de repaso 1. ¿Cuándo es necesario verificar completamente las conexiones de todo el circuito de control? 2. ¿Por qué deben ser desconectados los terminales de una bobina a fin de determinar exactamente si el arrollamiento de ésta está deteriorado o no? 3. ¿Es necesariamente de naturaleza eléctrica la avería en un circuito de control? 4. ¿Se puede afirmar que un circuito eléctrico que comprenda contactos móviles está perfectamente cerrado porque dichos contactos están cerrados? 5. ¿Por qué en el diagnóstico de averías se debe hacer funcionar una máquina en una parte de su secuencia de operaciones antes de tratar de localizar la avería? 6. ¿Cuáles son las dos causas posibles de disparo repetido de los relés de sobrecarga? 7. ¿Debe probar el circuito el reparador después de reparar un defecto, o debe intentar determinar todas las causas de avería antes de probar el circuito? 8. ¿Cuáles son las causas más frecuentes de avería en los arrancadores de motor? 9. Cuando se diagnostica un circuito que ha estado funcionando ¿procede comprobar que el conexionado es correcto? 10. ¿Cuál es la principal causa de avería de los dispositivos piloto tales como los interruptores de flotador o los de fin de carrera? 11. En la figura 9-1, ¿cuál será la causa más probable de que el circuito solamente funcione durante el tiempo en que se mantiene apretado el pulsador ARRANQUE? 12. ¿Cuál será la causa más probable de avería si, cuando se aprieta el pulsador ARRANQUE, el relé de control permanece excitado pero la bobina M1 no hace el enganche? 13. ¿Cuáles serán los resultados de que los relés de sobrecarga del circuito de la bobina M2 esté abierto mientras el compresor funciona? 14. ¿Qué es generalmente más difícil, hallar la causa de la avería o repararla después de localizada? 15. ¿Cuál de los dos trabajos mencionados en la pregunta 14 requiere más conocimientos?
- 10. Control de motores eléctricos Mantenimiento de los equipos de control Si hay una regla única aplicable a todos los, procedimientos de mantenimiento en todas las instalaciones y en todas las condiciones es ser cuidadoso. La negligencia y el no observar las precauciones de seguridad son dos cosas que el encargado del mantenimiento no se puede permitir. 8-1 Procedimiento General El primer requisito en cualquier servicio de mantenimiento bien organizado debe ser la inspección periódica para evitar que surjan serias averías. Esta inspección incluirá no solo el equipo eléctrico sino también la máquina, y la observación del desgaste y deterioro que puedan haber en el equipo, lo que permitirá conocer los puntos peligrosos que deberán cuidarse, así como el plan de reposiciones y verificaciones necesarias para evitar que puedan presentarse averías importantes. Una de las principales causas de fallo de los sistemas de control es la presencia de polvo, grasa, aceite y suciedad, que deben eliminados periódicamente para que el equipo pueda funcionar correctamente. La eliminación del polvo y la suciedad se pueden realizar frotando con trapos, pero esto no siempre resulta eficaz para eliminar el aceite y la grasa. Estas sustancias se eliminarán generalmente empleando un disolvente tal como el tetracloruro de carbono. Cuando se emplean estos disolventes habrá que tomar precauciones porque la inhalación de cualquier cantidad apreciable de sus vapores puede ser muy perjudicial. Por consiguiente, siempre deberá haber una ventilación adecuada. La inspección periódica incluye invariablemente una verificación del calentamiento del equipo eléctrico y de las partes mecánicas, ya que el exceso de calor es una indicación infalible de anomalía en el funcionamiento. La utilidad de la verificación del exceso de calor depende del conocimiento que se tenga de la temperatura de funcionamiento de los cojinetes, bobinas, contactos, transformadores y las otras muchas piezas del equipo asociado con la maquinaria, motores y control. Los cojinetes del motor y del equipo eléctrico deben ser verificados en cuanto a su lubricación correcta. Sin embargo es muy raro que los cojinetes de equipo eléctrico tales como los de arrancadores y conmutadores requieran engrase, ya que generalmente están proyectados para funcionar en seco, y en este caso el engrase de los cojinetes más bien será causa de un mal funcionamiento. Otra causa frecuente de avería del equipo de control es la flojedad de los pernos, pasadores y conexiones eléctricas. Se deberá comprobar periódicamente que todas las conexiones están apretadas, y la inspección incluirá la verificación de posibles pernos y tuercas flojos en el equipo. Los cortocircuitos y derivaciones a tierra de las conexiones eléctricas pueden ser evitadas por la inspección del aislamiento y mediante el use del meghómetro para medir el de los motores y cables del equipo asociado. Cuando se tenga la misión de mantenimiento de un equipo, la primera ley a seguir es familiarizarse con dicho equipo, debiéndose conocer mecánica y eléctricamente a fin de detectar toda causa posible de avería antes de que se produzca. La segunda ley es ser observador. Siempre que se pase junto a un componente del equipo del que sea responsable, escuchar y mirar. Muy frecuentemente esto es todo lo necesario para estar advertido de las averías que pueden producirse. Un buen procedimiento de mantenimiento puede ser resumido en muy pocas palabras: Que no haya piezas ni conexiones flojas, conservarlas limpias y lubricadas e inspeccionarlas frecuentemente. 8 Mantenimiento de los equipos de control
- 11. Control de motores eléctricos Mantenimiento de los equipos de control 8-2 Mantenimiento de los Arrancadores de Motor La avería que más frecuentemente se encuentra en los arrancadores de motor es debida a defectos de los contactos. Éstos deben ser inspeccionados para ver si están deteriorados o picados excesivamente y bien alineados. Si están picados habrá que limarlos o esmerilarlos con papel de lija pero teniendo cuidado de no arrancar demasiado material de las superficies de contacto o cambiar su forma apreciablemente. Si los contactos son de cobre y están expuestos al calor y el oxígeno, cuando se cierran y se abren se puede formar óxido de cobre en la superficie, que por ser aislante debe ser eliminado. La mayoría de los contactos de cobre son del tipo de frotamiento, los cuales eliminan por sí mismos el óxido por la acción de frotamiento durante el cierre. Si los contactos están plateados, siendo el óxido de plata un buen conductor, no es necesario suprimirlo; en efecto, los contactos de plata nunca deben ser limados a no ser que estén muy picados. Los contactos deben ser inspeccionados no solo en cuanto al picado sino en cuanto a la correcta alineación y a la presión de contacto. La alineación incorrecta o la falta de presión de contacto producirá un arco excesivo y el consiguiente picado. 8-3 Causas de Averías Una de las causas más frecuentes de avería del equipo automática es el ajuste incorrecto de los contactos y de los circuitos de acción diferida. Generalmente, el fabricante de los controladores para equipo automático facilitará la documentación pertinente relativa a la distancias de separación de los contactos cuando están abiertos y la correcta temporización del circuito. El responsable del mantenimiento deberá disponer de esta información para que pueda corregir periódicamente estos ajustes. La verificación de ellos se deberá hacer en la inspección regular de este tipo de equipo. La segunda causa en orden de importancia de las averías en los arrancadores de motor y los contactores es que haya bobinas quemadas. En los arrancadores modernos las bobinas están bien construidas y bien aisladas, con lo que queda eliminada la perturbación debida a las vibraciones y la humedad. Sin embargo aun así están expuestas bobinas a que se quemen por una de las dos causas siguientes. La primera y más frecuente es debida a que, al ser atraída la armadura de un contactor de c.a. por su núcleo deje un entrehierro superior al previsto por el fabricante, lo que repercutirá en un aumento de la intensidad en la bobina a niveles peligrosos. La corriente normal al iniciarse el cierre del contactor puede llegar, por ejemplo, a 40 ó 45 amperios para descender, una vez cerrado, a un valor muy bajo, de 1 a 1,5 amperios, que es suficiente para mantener el circuito magnético. Si el circuito no queda cerrado correctamente, la bobina mantendrá una corriente cuya intensidad estará comprendida entre estos dos valores, y que es suficiente para que los arrollamientos se calienten excesivamente y se quemen. La segunda causa de quemadura de la bobina es una tensión incorrecta. Si la tensión aplicada a la bobina es excesivamente elevada, la corriente que pasa por la bobina puede alcanzar niveles peligrosos y quemarla. Si la tensión aplicada a la bobina disminuye tanto que el circuito magnético no se cierra completamente, tendremos un entrehierro que producirá corrientes de intensidad excesiva y se quemará la bobina. Teniendo en cuenta las causas mencionadas, el procedimiento correcto cuando se comprueba que hay una bobina quemada en un arrancador es verificar el acoplamiento mecánico, ver si el contactor cierra correctamente y verificar la tensión aplicada a la bobina bajo carga para comprobar si es suficiente pero no excesiva. Cuando la atracción de los muelles es excesiva, el circuito magnético puede permanecer parcialmente abierto, por lo que se debe verificar también dicha tensión. Si el contactor está equipado con conductores flexibles, habrá que comprobar si están en buen estado, y de no ser así habrá que reemplazarlos. Si el arrancador está equipado con pantallas para el arco, deben ser inspeccionadas en cuanto a la alineación correcta alrededor de los contactos. También habrá que comprobar que no existen acumulaciones de polvo y suciedad, ni depósitos de carbón acumulados dentro de estas pantallas, y en caso de que existan deberán ser cuidadosamente eliminados, ya que el carbón reduce el camino del arco y puede ser causa de descarga superficial o salto de chispa, particularmente en condiciones de alta tensión. Es muy importante que el muelle produzca una presión de contacto correcta en un arrancador y esto debe ser comprobado consultando la documentación del fabricante si se dispone de ella. Por lo menos habrá que comprobar que cada contacto tiene aproximadamente la misma presión debida al muelle ya que deben ser iguales en todos los contactos. Una de las causas más frecuentes de vibración de los contactos y zumbido en el arrancador es que las tensiones de los muelles sean incorrectas o desiguales, por lo que cuando se observan estos defectos se debe verificar la fuerza del muelle en cada contacto para determinar si es suficiente y si en todos ellos es la misma.
- 12. Control de motores eléctricos Mantenimiento de los equipos de control 8-4 Mantenimiento de los Relés En general el mantenimiento de los relés de tensión es el mismo que para los arrancadores y contactores de motor con la única precaución adicional de que, en general, los relés funcionan con corrientes de menos intensidad y con menos potencia. Esta demanda de potencia más baja requiere en cambio un mecanismo y una disposición mecánica más delicada y esto a su vez requiere más atención en el mantenimiento. Los relés de corriente deben ser verificados para comprobar si al pasar por ellos la intensidad apropiada cierran sus contactos y si la atracción del muelle y la separación entre los contactos son correctas con el fin de que las corrientes de enganche y desenganche también lo sean. El desgaste de la superficie de un contacto y el cambio de la atracción de muelle puede producir una gran variación en los valores de las intensidades de funcionamiento, de retorno y en el porcentaje de retorno, lo que a su vez puede hacer que el circuito funcione de manera perjudicial para el equipo. Los relés de sobrecarga son dispositivos que normalmente no funcionan durante períodos largos de tiempo; por consiguiente, están expuestos a la corrosión, al polvo y la suciedad, que deben ser eliminados durante las revisiones periódicas de mantenimiento. Si se pone de equipo apropiado, los relés de sobrecarga deben ser accionados por corriente periódicamente para comprobar su correcto funcionamiento. El disparo intempestivo de los relés de sobrecarga no es generalmente una indicación de defecto del relé, sino más bien de sobrecarga en el circuito. El encargado del mantenimiento debe determinar primero el valor de la corriente en el cual se dispara realmente la unidad de sobrecarga y comparar este valor con el de la corriente admisible para determinar si el defecto radica en la unidad de sobrecarga o en el propio circuito. Los relés temporizados, tanto si son del tipo neumático como del de émbolo amortiguador, requieren el ajuste periódico para compensar los cambios normales en sus características de funcionamiento. El relé de émbolo amortiguador debe ser revisado para ver si tiene polvo u otra materia extraña en el depósito de aceite, ya que cualquier impureza en el aceite afectará a la exactitud de la temporización. Muy frecuentemente los contactos del relé pueden ser del tipo inversor con solapa o inversor sin solapa, siendo en estos casos muy importante que la atracción del muelle y la separación entre los contactos sean correctas, lo que requiere una verificación para determinar si están funcionando como deben. 8-5 Mantenimiento de los Dispositivos Piloto En general un dispositivo piloto requiere muy poco mantenimiento limitándose a una verificación de su funcionamiento mecánico y de sus contactos. Cuando el dispositivo piloto es del tipo de interruptor de presión o de interruptor de vacío, deberá ser verificado de vez en cuando su margen de funcionamiento para comprobar que los contactos se abren y se cierran con la presión para la que han sido ajustados. Las superficies de contacto deben ser examinadas para comprobar que no tienen acumulado revestimiento de óxido de cobre, polvo o aceite. Se les deberá hacer funcionar dentro de su margen de presión varias veces para cerciorarse de su buen funcionamiento. Los interruptores de flotador están expuestos a averías por dobladura de las varillas del flotador o fugas de agua. Una verificación de funcionamiento correcto del flotador, la varilla de éste y la conexión mecánica hasta el interruptor determinará la cantidad de desgaste y en general indicará si es necesario reemplazar alguna pieza antes de que se produzca una seria avería. Naturalmente en la verificación estará incluida la del contacto y la de los dispositivos piloto. Cuando los interruptores de límite o fin de carrera son parte integrante de un sistema de control, constituyen una causa muy probable de avería, ya que generalmente funcionan muchos millares de veces por día cuando son una pieza activa de equipo. Están propensos a fallo mecánico a causa de desgaste de los cojinetes y en las superficies de las levas, así como en las superficies de contacto y por variación de la atracción de los muelles y la única solución para evitar las averías es realizar una inspección frecuente y exacta en la que se determine su condición eléctrica y mecánica. Cuando su condición mecánica es dudosa, se le reemplazará o reparará antes de que den lugar a una seria avería en el resto del equipo.
- 13. Control de motores eléctricos Mantenimiento de los equipos de control 8-6 Mantenimiento de Frenos y Embragues La principal causa de avería de los frenos es, naturalmente, el desgaste del forro o de los discos de freno, avería que no se presentará si se efectúa la inspección periódica. Nunca se debe dejar que el desgaste de un forro de freno alcance una condición peligrosa. La segunda causa principal de avería de freno es el excesivo desgaste y el ajuste mecánico incorrecto del solenoide eléctrico a otro dispositivo de mando con la zapata o el disco de freno. Debe ser mantenido en alineación y condición mecánica correcta. El ajuste mecánico incorrecto es una causa frecuente de que se averíen por calentamiento excesivo las bobinas del electroimán o solenoide del freno, ya que no provee el cierre completo del circuito magnético, lo que a su vez es causa de excesiva corriente en la bobina. Los embragues de accionamiento electromagnético están expuestos a las mismas clases de avería que los frenos de igual accionamiento. Por consiguiente, el procedimiento de inspección y mantenimiento. De estas unidades será el mismo que el de los frenos. Resumen Aunque en este capítulo hemos procurado señalar alguno de los principios básicos de un buen servicio de mantenimiento, el mantenimiento real de un determinado elemento del equipo estará determinado por su ciclo de funcionamiento, la complejidad de sus órganos y el tiempo que se disponga para ello. La principal dificultad con que se tropieza en el servicio de mantenimiento suele ser la mala interpretación de lo que ello significa, ya que mantener el equipo en funcionamiento no es repararlo después de averiad, sino que consiste en inspeccionarlo, conservarlo limpio y con todas sus piezas y conexiones apretadas, no significando reparar. Preguntas de repaso 1. ¿Cuál es la principal causa de que se quemen las bobinas en los arrancadores, contactores y relés? 2. ¿Puede ser causa de avería de los contactos el óxido de cobre? 3. ¿Se deben limar frecuentemente los contactos de plata? 4. ¿Cuáles son algunos de los resultados de tracción incorrecta de muelle en los arrancadores? 5. ¿Cuál es la causa probable de que se produzca zumbido en los arrancadores de motor? 6. ¿Cuál es el resultado previsible de aplicar una tensión insuficiente a la bobina de un contactor electromagnético? 7. ¿Cuál es el procedimiento correcto para determinar la causa de disparo demasiado frecuente de los relés de sobrecarga? 8. ¿Cuál es la causa más probable de mal funcionamiento de un interruptor de flotador? 9. ¿Qué ocurrirá probablemente si se acumula carbonilla en las pantallas de arco de un contactor? 10. ¿Cuál es el mejor método para eliminar el aceite y la grasa de los contactos y otras superficies en que podría ser perjudicial? 11. Cuándo se utilizan productos de limpieza, ¿qué precauciones se deben tomar? 12. ¿Cuál será el resultado probable del mal ajuste mecánico de un freno? 13. ¿Cuál es la causa de variación de la temporización en los relés temporizados del tipo de émbolo amortiguador? 14. ¿Cuáles son los dos ajustes que pueden variar las intensidades de funcionamiento, dé retorno y del porcentaje de retorno en un relé de intensidad? 15. ¿Qué diferencia hay entre mantenimiento y reparación en lo que respecta a los circuitos de control y sus componentes?
- 14. Control de motores eléctricos Análisis de los circuitos de control Una vez dominada la técnica del proyecto de los circuitos de control, pasaremos a analizar circuitos ya proyectados por otros. La primera fase en el análisis de un circuito es determinar qué operaciones realiza la máquina o equipo propulsado por el motor, a fin de poder comprender fácilmente cuáles son las funciones del circuito. Para analizar cualquier circuito dado, deberá representarse en esquema explicativo o en línea, a no ser que ya se disponga de él. Como antes dijimos, si el esquema está correctamente hecho, la secuencia de las operaciones de control comenzará en la parte superior izquierda del dibujo y continuará siguiendo la primera recta horizontal, y luego cada una de las sucesivas hacia abajo. Sin embargo, no todos los esquemas están dibujados en este orden, por lo que no hay que esperar que esto sea siempre aplicable. 7-1 Procedimiento Básico El procedimiento básico para el análisis de un circuito es muy sencillo y se comprenderá fácilmente si se ha asimilado el capítulo precedente sobre el proyecto de circuito. Basta considerar los componentes uno por uno en el circuito y deducir lo que ocurre si se actúa sobre un pulsador o se cierra o se abre un contacto, teniendo en cuenta que siempre debe haber un circuito completo desde una línea a otra a través de la bobina que excita un relé, contactor o arrancador. Si el circuito está abierto en cualquier punto, la bobina en particular. se desexcitará y sus contactos, si están incluidos en el circuito, estarán en su posición normal. Cuando el circuito de una determinada bobina queda cerrado, el contactor, relé o arrancador están excitados, y sus contactos están en posición contraria a la normal. Es decir, si son contactos normalmente cerrados, ahora estarán abiertos; si son contactos normalmente abiertos, ahora estarán cerrados. Si se utiliza un relé temporizado en el circuito, habrá que tener en cuenta si sus contactos están temporizados a la apertura o al cierre para determinar la posición normal y su función en el circuito. Cuando se utilizan relés en el circuito, hay que cerciorarse de que han sido localizados todos los contactos accionados por cada relé, así como su posición según esté o no excitada la bobina, ya que sin ello no será posible comprender la misión del circuito en su conjunto. Igualmente debe verificarse la misión de cada uno de los componentes en sus posiciones normal y excitada. No se deben tomar nunca conclusiones apresuradas cuando no se ha terminado de hacer el análisis. En la siguiente sección analizaremos varios circuitos siguiendo el procedimiento de paso a paso para adquirir los conocimientos fundamentales de esta operación, que podrán ser aplicados a situaciones reales en la práctica. El análisis de un circuito es un requisito previo para cualquier diagnóstico eficiente de averías en los circuitos de control. 7-2 Análisis del Circuito 1 Observando la figura 7-1 resulta evidente que es un circuito de control para un arrancador de marcha adelante y marcha atrás. Para analizar la operación de este circuito comenzaremos por la parte superior izquierda en L1. El primer componente es un pulsador PARADA que está normalmente cerrado. A continuación pueden verse tres derivaciones que terminan: la 1.a en un pulsador de arranque normalmente abierto marcado ADELANTE; la 2.a en un interruptor unipolar en posición abierto, y la 3.a en otro pulsador de arranque marcado ATRÁS (marcha atrás), también normalmente abierto. Si ahora apretamos el pulsador de MARCHA ADELANTE, la corriente pasará a través de los contactos normalmente cerrados del pulsador de marcha ATRÁS y R2 excitando la bobina F perteneciente al contactor de la marcha adelante, ya 7 Análisis de los circuitos de control
- 15. Control de motores eléctricos Análisis de los circuitos de control que el circuito se cerrará por los contactos de sobrecarga normalmente cerrados designados OL hasta L2. El circuito está, pues, completo desde la línea L1 a través de la bobina del arrancador de marcha adelante hasta L2, y la bobina F estará ahora excitada. La excitación de esta bobina abrirá el contacto nor malmente cerrado F2 y cerrará el contacto normalmente abierto F1. La apertura del contacto normalmente cerrado no tiene efecto inmediato en el circuito, a causa de que el contacto normalmente abierto del pulsador para la marcha atrás tiene interrumpido el circuito delante de este contacto. El cierre del contacto normalmente abierto no tiene efectos inmediatos, a causa de que el interruptor unipolar está abierto. Fig. 7-1 Análisis del circuito 1. Control para marcha adelante y marcha atrás de un solo motor. Cuando se libera el pulsador MARCHA ADELANTE, está interrumpido el circuito en este punto desde la línea hasta la bobina F y, a causa de que no hay contacto de mantenimiento que puntee esta interrupción en el circuito, la bobina se desexcitará. Supongamos ahora ,que cerramos el interruptor unipolar de modo que conecte la línea 1 a un lado del contacto normalmente abierto F1 y apretemos nuevamente el pulsador MARCHA ADELANTE. La acción del circuito es la misma que la que antes explicamos, excepto que ahora, cuando está cerrado el contacto normalmente abierto F1, se completa el circuito desde la línea 1 por el contacto del pulsador normalmente abierto. Cuando es liberado este pulsador, el circuito se mantiene a través del contacto F1 y el motor continuará funcionando en marcha adelante. Supongamos ahora que apretemos el pulsador MARCHA ATRÁS. Esto abrirá su contacto normalmente cerrado y cerrará su contacto normalmente abierto. El resultado será la interrupción del circuito de la bobina F y el establecimiento del circuito a través de los contactos normalmente abiertos del botón MARCHA ATRÁS a través del contacto normalmente cerrado F, y la bobina R hasta la línea 2, frenándose así el motor por inversión de marcha. El funcionamiento del motor en marcha atrás se mantiene por el contacto normalmente abierto R1, que ahora está cerrado. El arrancador de marcha adelante no puede poner en funcionamiento al motor por estar abierto el contacto normalmente cerrado R. Si se pone el interruptor unipolar en la posición abierto y se aprieta el pulsador MARCHA ATRÁS, tenemos exactamente la misma operación que cuando empujamos el de MARCHA ADELANTE, excepto que ahora es excitado momentáneamente el arrancador de marcha atrás. Ya que hemos analizado la operación de los componentes individuales de este circuito, podemos resumir su acción de conjunto diciendo que el circuito provee el funcionamiento de marcha adelante y marcha atrás. También provee el frenado por inversión de marcha en cualquier sentido y por la posición del interruptor unipolar proveerá la puesta en marcha momentánea en cualquier sentido a voluntad del operador. Los contactos normalmente cerrados R2 y F2 son un enclavamiento eléctrico entre los contactores de marcha adelante y marcha atrás. El interruptor unipolar representado en este circuito tome el nombre de interruptor para marcha intermitente o gradual a causa de que en la posición abierto permite poner en marcha durante cortos intervalos sucesivos al motor en uno a otro sentido, según el pulsador accionado. 7-3 Análisis del Circuito 2 En la figure 7-2 vemos solamente un contactor o bobina de arrancador, lo que indica que es un circuito para el control de un solo motor que funciona en una sola dirección. Aplicando nuestro principio de análisis al circuito para determinar su funcionamiento, veremos que el pulsador PARADA está normalmente cerrado por lo que la corriente puede circular hasta uno de los dos contactos normalmente abiertos identificados por CR. Si apretamos el pulsador ARRANQUE, se completará el circuito a través de la bobina designada por CR hasta la línea 2. Si las designaciones utilizadas en este circuito están normalizadas, se puede afirmar que éste es un relé de control que aparentemente tiene dos contactos normalmente abiertos utilizados en este circuito, designados por 1 las letras CR, y que al estar excitado el relé CR estarán cerrados. Debido al cierre de los contactos CR, se excitará el contactor
- 16. Control de motores eléctricos Análisis de los circuitos de control M y se pon en marcha el motor. Al excitarse M, cerrará el contacto normalmente abierto M, que junto con el CR ya cerrado permitirá que el contactor M continúe excitado al dejar de accionar el pulsador ARRANQUE. Fig. 7-2 Análisis del circuito 2. Control de arranque, paradas y funcionamiento intermitente de un solo motor. El motor podrá ser parado con sólo apretar el pulsador PARADA, lo que interrumpe el circuito desde L1, permitiendo que el relé de control y la bobina del arrancador se desexciten. Supongamos que ahora apretamos el segundo pulsador de contacto normalmente abierto, o sea el de funcionamiento intermitente. La corriente pasará directamente desde la línea 1 a través del pulsador PARADA normalmente cerrado, del pulsador que hemos accionado hasta la bobina M, y luego a través de los contactos de los relés sobrecarga hasta la línea 2, y el motor será excitado. La excitación de la bobina M cierra nuevamente su contacto normalmente abierto; pero éste no mantendrá el circuito cuando se libere el pulsador, a causa de que el contacto normalmente abierto CR está abierto y tiene al circuito interrumpido desde la línea 1. Cuando liberamos el pulsador el motor quedará desconectado de la línea. Este circuito provee la puesta en marcha intermitente y además la protección adicional de seguridad de un relé el cual impide eficazmente que el arrancador quede enclavado durante el servicio intermitente. Cuando se aprieta el pulsador ARRANQUE, se excitan el relé de control y el contactor, quedando éste excitado a través de los contactos del relé. Cuando se aprieta el pulsador INTERMITENTE solo se excita el contactor, y los contactos del relé normalmente abiertos impiden eficazmente que quede excitado al dejar de accionar dicho pulsador. 7-4 Análisis del Circuito 3 En la figura 7-3 se ve que las tres líneas horizontales de la parte superior contienen los contactos de línea del arrancador designados por la letra M, los relés térmicos de sobrecarga y los tres bornes de motor designados T1, T2 y T3. Las dos líneas horizontales siguientes contienen primero los contactos DB y luego el primario de un transformador designado por PT. El secundario de este transformador está conectado a un rectificador puente de onda completa con dos terminales de c.c. marcados con los signos más y menos respectivamente. La salida de este rectificador está aplicada a los terminales T1 y T3 del motor a través de los contactos DB. La parte del circuito hasta ahora considerada pertenece a las conexiones interiores del controlador, y la sección restante del circuito contiene el control exterior arranque-parada del controlador. Al examinar este circuito, si aplicamos nuestra técnica de análisis, veremos que apretando el pulsador ARRANQUE se excitará a la bobina M a causa de que todos los otros componentes del circuito están normalmente cerrados. La excitación de la bobina M cerrará todos sus contactos y, si consideramos esto en el esquema, el motor se pondrá en marcha al cerrarse los tres contactos de línea. El contacto auxiliar de mantenimiento en paralelo con el pulsador ARRANQUE se cerrará, quedando excitado el contactor M aunque se deje de presionar el pulsador ARRANQUE por lo que el motor quedará funcionando normalmente. La abertura del contacto normalmente cerrado M, situado en la línea inferior del dibujo, impedirá que sea excitada la bobina DB. Simultáneamente con la excitación de la bobina M, la bobina T es también excitada. Ésta parece ser de un relé temporizado ya que su contacto T lleva la indicación (T.O.), temporizado a la abertura. Si apretamos el pulsador PARADA, la bobina M se desexcitará abriéndose todos sus contactos, que vuelven a sus posiciones normales. La abertura de los contactos de línea M interrumpe el circuito del motor y corta la corriente. El contacto auxiliar en paralelo con el pulsador ARRANQUE se abre, pero no afecta por el momento al circuito. Sin embargo el retorno del contacto normalmente cerrado M a su posición cerrada, excitará a la bobina DB a causa de que el contacto T está aún cerrado. Sabemos que este contacto está cerrado porque está designado como temporizado a la abertura, y aunque su bobina está ahora desexcitada, el dispositivo temporizador mantendrá a este contacto en posición cerrada.
- 17. Control de motores eléctricos Análisis de los circuitos de control Fig. 7-3 Análisis de1 circuito 3. Freno dinámico para motor jaula. (Cutler-Hammer, Inc.) Estando la bobina DB excitada, todos los contactos indicados por las letras DB estarán ahora en posición cerrada. El contacto normalmente cerrado en serie con la bobina M se abrirá, impidiendo que esta bobina pueda volver a excitarse hasta que el relé temporizado haya abierto al contacto T. El cierre de los cuatro contactos normalmente abiertos DB asociados al transformador y rectificador aplicarán la tensión c.c. a T1 y T3 y la mantendrán en el motor hasta que se desexcite el relé temporizado, abriéndose el contacto T, que vuelve a poner al circuito en su posición normal o de reposo. ¿Qué finalidad tiene aplicar tensión de c.c. a un motor cuando se aprieta el pulsador PARADA? La aplicación de la tensión c.c. a un motor de jaula en funcionamiento tiene el efecto de suavizar la acción de frenado pero sin restarle efectividad y parará al motor rápida pero muy gradualmente. Puede parecer dudosa la necesidad de incorporar el relé temporizado en este circuito. Si no suprimiésemos la tensión c.c. del motor a velocidad casi nula, la baja resistencia en c.c. del arrollamiento del motor permitiría que pasase por él una corriente de intensidad excesiva, con el consiguiente recalentamiento y el posible deterioro de los devanados del motor. Este relé temporizado debe estar ajustado de modo que aplique la tensión de c.c. a los devanados del motor hasta que quede frenado y la suprima una vez esto ocurra. Según se desprende de lo estudiado, este circuito puede pertenecer a un arrancador de motor a tensión nominal o arranque directo, con la adición de un control rápido y suave de frenado. Este circuito puede ser muy bien aplicado a cualquier máquina que requiera una parada suave y rápida o bien se desee que el eje del motor quede libre, una vez parado para la rotación manual. También provee una parada sin tendencia a la inversión de marcha, lo que es una ventaja cuando deba ser aplicado el efecto de freno frecuentemente. Requiere menos mantenimiento que un freno mecánico, y por consiguiente se reducen los costes de mantenimiento. Además somete a menos choques a los elementos de la máquina accionada que un freno mecánico y produce menos calentamiento que con el frenado por inversión de marcha. Este tipo de frenado se Llama dinámico. 7-5 Análisis del Circuito 4 En la figura 7-4 vemos un doble juego de contactos de línea designados por 1M y 2M que conectan las líneas 1, 2 y 3 a los bornes del motor. También tenemos en esta parte del circuito contactos designados por S, que parecen interconectar alguno de los devanados del motor. En la sección inferior del esquema, tenemos un pulsador ARRANQUE uno de PARADA y una bobina S que parece pertenecer a una especie de contactor auxiliar. Además tenemos la bobina 1M, que evidentemente es un contactor de línea del motor. La bobina TR parece ser un relé temporizado. La bobina 2M parece ser un segundo contactor de línea del motor. En el análisis de este circuito supongamos que apretamos el pulsador ARRANQUE, con lo cual se excitará la bobina S, ya que todos los contactos y
- 18. Control de motores eléctricos Análisis de los circuitos de control pulsadores del circuito están cerrados. La excitación de esta bobina accionará a todos sus contactos, los cuales excitarán a la bobina 1M y también impedirán la excitación de la bobina 2M por la abertura de sus contactos normalmente cerrados. Los dos contactos normalmente abiertos S, que conectan tres de los bornes del motor, estarán ahora cerrados, formando una conexión en estrella de las bobinas del motor. La excitación de la bobina 1M cierra todos sus contactos, tres de los cuales son los de línea del motor, poniéndose éste en marcha. Otro de sus contactos está en paralelo con el pulsador ARRANQUE y actúa de contacto de mantenimiento. El otro contacto está en serie con la bobina 2M, que no actuará por estar abierto el contacto normalmente cerrado S. Tenemos aquí, pues, un motor de jaula en montaje de estrella y conectado directamente a la línea. En el instante en que es excitada la bobina 1M, lo ha sido la TR, y ha comenzado la acción temporizadora de su contacto normalmente cerrado TR. Cuando este contacto deja de actuar y se abre, interrumpe el circuito hasta la bobina S y todos sus contactos vuelven a la posición normal. La abertura de los dos contactos que conectan los arrollamientos del motor interrumpen la conexión en estrella de los devanados. La abertura del contacto en serie con la bobina 1M no tiene efecto en el circuito a causa de que éste está completado a través del contacto 1M en paralelo con aquél. El cierre del contacto normalmente cerrado en serie con la bobina 2M, completa ahora el circuito hasta esta bobina y hace que se cierren sus contactos, conectando directamente los bornes del motor a la línea, y formando una conexión triángulo del motor. Si se encuentra alguna dificultad en darse cuenta de las conexiones del motor, dibújense estas conexiones separadamente y se verá que la primera correspondía a la configuración en estrella y la segunda a una conexión en triángulo de los tres devanados del motor. Naturalmente, apretando el pulsador PARADA se desexcitan todas las bobinas y el circuito vuelve a su condición normal de reposo. Este circuito incluye tres resistencias y tres contactos para conectarlas, así como una bobina y otros contactos asociados que pueden ser necesarios para establecer una transición cerrada en el arranque del motor. De nuestro análisis de este circuito hemos deducido que es un arrancador de motor del tipo estrella-triángulo con el fin de obtener un efecto de tensión reducida en el arranque del motor como se explica en el capítulo 3. Fig. 7-4 Análisis del circuito 4. Arrancador estrella-triángulo para motor jaula (Cutler-Hammer, Inc).
- 19. Control de motores eléctricos Análisis de los circuitos de control En aplicaciones en que es necesaria o conveniente una transición cerrada, se representan las conexiones adicionales para añadir una resistencia que puntee las conexiones del motor durante la transferencia o paso de estrella a triángulo. Éste es un circuito más bien normal y sirve para un estudio del principio de funcionamiento. Sin embargo, advertimos otra vez que no es ésta la única manera posible de obtener el arranque en la disposición estrella-triángulo de los motores de jaula, y que por consiguiente no se debe recordar este circuito, como el único posible. El uso de un relé temporizado con sus contactos temporizados a la abertura conduce al tipo de arranque de tiempo fijo. Como el lector ya habrá observado, este controlador incluye un contactor bipolar y tres contactores tripolares electromagnéticos y el enclavamiento mecánico necesario para conseguir una secuencia de operaciones y evitar que puedan establecerse dos conexiones al mismo tiempo, lo que podría ser causa de cortocircuito. 7-6 Análisis del Circuito 5 En el circuito de la figura 7-5 vemos que la resistencia en serie con los conductores del motor parece indicar que se trata de un arrancador a tensión reducida por resistencia en el primario. Observando la sección de control del esquema tenemos lo que parece ser un circuito típico de tres hilos para excitar las bobinas 1CR y TR. Si apretamos el pulsador ARRANQUE, pasará la corriente a través del pulsador PARADA normalmente cerrado, del pulsador ARRANQUE y del contacto R2, y siendo excitadas las bobinas 1CR y TR. La excitación de la bobina 1CR hará que sus contactos se cierren. El 1CR1 está en paralelo con el pulsador ARRANQUE y realizará la función de mantener el circuito hasta la bobina. El contacto 1CR2 se cerrará y excitará a la bobina S. La excitación de esta bobina hará que se cierren los contactos de línea S y pase la corriente al motor a través de las resistencias serie. La presencia de resistencias en serie hará que la tensión aplicada al motor sea inferior a la nominal, reduciéndose de esta forma la intensidad de arranque a un valor aceptable. El motor pondrá en marcha a tensión reducida, y el relé temporizado no habrá cerrado aún su contacto TR. En el momento de cierre, se excitará la bobina 2CR ya que el contacto S1 está cerrado por la bobina S. La excitación de la bobina 2CR hará que se cierre el contacto 2CR1. Este contacto está en paralelo con el pulsador ARRANQUE y forma un circuito adicional para el mantenimiento de la bobina. El cierre del contacto 2CR2 hace que se excite la bobina R, cerrando los contactos de línea designados por R. Estos contactos están en paralelo con las resistencias y las cortocircuitan eliminándolas del circuito y aplicando la tensión de línea al motor, el cual acelerará hasta adquirir su velocidad de régimen quedando conectado directamente a la línea. La excitación de la bobina R también cierra el contacto R1, que está en paralelo con los contactos TR y S1. La abertura del contacto R2 hará que se desexciten las bobinas 1CR y TR. Los contactos asociados a estas dos bobinas volverán a su posición normal, pero el relé 2CR se mantendrá excitado ya que su circuito se cierra mediante el pulsador PARADA, el contacto 2CR1 y el contacto R1. El citado relé mantendrá cerrado el contacto 2CR2 con lo que quedará excitada R y por lo tanto el motor conectado a la red. Si ahora se aprieta el pulsador PARADA, todos los contactos volverán a su posición normal y todas las bobinas se desexcitarán, abriéndose los contactos de línea del motor y éste se parará. Fig. 7-5 Análisis del circuito 5. Arrancador a tensión reducida mediante resistencias.
- 20. Control de motores eléctricos Análisis de los circuitos de control Evidentemente este circuito es para arrancador a tensión reducida, con resistencia en el primario. Nuevamente debemos señalar que ésta es sólo una de las muchas disposiciones de las bobinas y contactos que se puede emplear para obtener los mismos resultados. . Diferentes fabricantes emplearán variantes de un circuito análogo en el control de sus arrancadores, pero el principio fundamental de funcionamiento es el mismo en los circuitos destinados al arranque a tensión reducida y tiempo fijo. Este circuito se podrá ampliar para obtener varios escalones de aceleración por la adición de más unidades de resistencia en serie con el motor, con un relé de control y un relé temporizado por cada escalón de aceleración. El arrancador estudiado es de dos escalones ya que provee dos etapas de aceleración, una a tensión reducida y la otra a tensión total de línea. El único ajuste crítico del circuito será el de relé temporizado TR, cuyo ajuste de tiempo será tal que el motor funcione a tensión reducida solamente durante el tiempo necesario para que acelere hasta alcanzar su máxima velocidad en condiciones de tensión reducida. El funcionamiento prolongado del motor a tensión reducida puede ser causa de recalentamiento y de deterioro de los devanados así como de los elementos de resistencia. Este arrancador comprende un contactor de arranque S, que debe ser tripolar, y un contactor de funcionamiento R, que también debe ser tripolar. Además de los dos contactores, hay dos relés instantáneos y uno temporizado. El equipo se encontrará generalmente montado en una caja o cofret y sobre la puerta o tapa estarán los pulsadores ARRANQUE-PARADA, aunque también pueden estar instalados en otro lugar cercano o alejado del cofret. En esta fase de nuestro estudio de los controles y análisis de los circuitos de control, el lector debe considerar a un circuito desde el punto de vista de lo que ocurriría si se quemase una determinada bobina o un contacto dejase de abrir o cerrar, lo que siempre puede ocurrir. Por ejemplo, supongamos que el relé temporizado TR tuviera una bobina quemada ¿cuál sería el efecto en este circuito? El circuito funcionaría a través del contactor de arranque cerrado S, y el motor se excitaría en condiciones de tensión reducida. Si el contacto TR no se cierra, entonces el segundo relé de control no se puede excitar ni tampoco se puede excitar el contactor de funcionamiento. Así pues, el motor continuaría funcionando en condiciones de tensión reducida. En estas condiciones la corriente es tal que abrirá los contactos del relé de sobrecarga y se desexcitará la bobina 1CR, parándose el motor y volviendo a su condición normal. Estas unidades de sobrecarga deben ser de reposición manual a fin de que el operador pueda determinar la causa de la avería antes de poner nuevamente en marcha el motor. Este circuito de control proporcionará protección contra la sobrecarga y protección contra secuencia incompleta (Sec. 2-15). 7-7 Análisis del Circuito 6 El esquema de la figura 7-6 es un circuito parcial que nos servirá de ejemplo de un circuito con enclavamientos, muy utilizado cuando el mal funcionamiento de alguna parte del equipo deba requerir la atención del operador antes de volver a poner en funcionamiento dicha parte. En el circuito de la figura 7-6 aparece un contacto representado en línea de trazos que representa a los componentes normales de control, tales como pulsadores ARRANQUE y PARADA, interruptores de límite a otros dispositivos que normalmente ponen en marcha y paran la máquina. El circuito corresponde sólo a los componentes de enclavamiento. Los contactos normalmente cerrados representados por PSl, 2 y 3 son interruptores de presión que sólo se abren cuando no se mantiene la presión en la parte correspondiente de la máquina o proceso. Las bobinas A, B y C son relés y están conectadas en paralelo con lámparas piloto. Fig. 7-6 Análisis del circuito 6. Circuito con enclavamiento
- 21. Control de motores eléctricos Análisis de los circuitos de control Para iniciar la operación o funcionamiento de este equipo es necesario apretar el botón REPOSICIÓN, el cual cerrará los tres interruptores asociados y acoplados mecánicamente entre sí. Los tres relés se excitarán, cerrándose sus contactos normalmente abiertos. Los contactos A1, B1 y C1 se utilizan como contactos de mantenimiento de la bobina. Los A2, B2 y C2 permanecen en su posición cerrada mientras la acción de los interruptores de presión sea normal, haciendo así posible que los componentes normales de control exciten a la bobina M cuando se desee. Si la presión baja o sube, como puede ocurrir desde su valor normal en cualquiera de los tres sitios en que está situados los interruptores de presión, se abrirá uno de los contactos, normalmente cerrados. Por ejemplo, si se abre PS1, la bobina A se desexcitará, y se abrirá el contacto A2 parándose el motor. Al mismo tiempo, el contacto A1 se abrirá. Si la presión vuelve a ser normal en el interruptor 1, su contacto se cerrará pero la bobina A no se volverá a excitar a causa de que el circuito está interrumpido en el contacto A1. La lámpara piloto en paralelo con esta bobina se apagará indicando cuál de los circuitos protectores no está funcionando; de esta forma el operador sabrá que el interruptor de presión 1 ha sido la causa de paro del equipo. A fin de restaurar el funcionamiento normal de la máquina, la presión detectada por el interruptor 1 debe ser restaurada en su valor normal y a continuación apretar el pulsador REPOSICIÓN para excitar a la bobina A, con lo que se cierran sus contactos y se restablece el funcionamiento normal del circuito de control. Naturalmente, el mismo procedimiento será aplicable a los interruptores segundo y tercero y a los contactos asociados y las bobinas. Este tipo de circuito se aplica generalmente al equipo totalmente automático, en que la máquina o proceso debe iniciarse y detenerse por sí mismo bajo el control de los dispositivos piloto que detectan la condición o estado del proceso. Cuando las máquinas funcionan en estas condiciones, generalmente es conveniente disponer de algún medio para detener el proceso si se produce un mal funcionamiento y no volver a restaurarlo hasta que haya sido remediado el defecto. Resumen Los circuitos precedentes y su análisis constituyen una base experimental para el análisis de los circuitos que son de uso normal en la industria. Aunque estos circuitos no representan en modo alguno todas las posibilidades que pueden presentarse en el control de motores, ni siquiera la mayor parte de ellas, el procedimiento y el método de analizar su funcionamiento, si ha sido correctamente entendido, puede ser aplicado a cualquiera de los circuitos de control y seguido hasta comprender completamente el funcionamiento del equipo y de los componentes de control a él asociados. El lector que desee trabajar provechosamente en equipos de control aplicará estos principios básicos a otros circuitos que estén a su disposición hasta que esté seguro de que puede interpretar y analizar los circuitos de todos los tipos con razonable rapidez. El riesgo de fracaso en el análisis de los circuitos radica en la tendencia que se tiene a deducir conclusiones apresuradas, es decir, creer que se sabe lo que hace el circuito y cómo funciona cuando sólo se han analizado parte de sus posibilidades. Si se aprende a estudiar un circuito contacto por contacto y bobina por bobina hasta que se ha seguido completamente su funcionamiento en su secuencia normal desde el principio hasta el fin, se evitarán muchos quebraderos de cabeza en el futuro. No incluimos preguntas de repaso al final de esta sección. El procedimiento que el lector debe seguir es obtener circuitos adicionales y practicar el análisis de ellos hasta alcanzar suficiente eficacia. Lo que distingue a un buen diagnosticador de averías y a uno malo estriba generalmente en la aptitud para analizar el circuito de control y determinar rápidamente cuál de los muchos componentes puede ser la causa del mal funcionamiento de la máquina que está tratando de corregir.
- 22. Control de motores eléctricos Desarrollo de los circuitos de control Los circuitos de control se diseñan o proyectan muy pocas veces como unidad completa. En lugar de esto se van desarrollando por etapas sucesivas cada una de las cuales provee la función de control que se desea realizar con ella. Es lo que se hace cuando se escribe una carta, en la que se procede, párrafo por párrafo, basta expresar la idea en el papel. El mismo procedimiento se debe seguir para desarrollar un circuito de control. Lo primero será concebir la idea del conjunto de todas las funciones de control de modo que se efectúe cada función en su dependencia correcta con las otras funciones que debe realizar el circuito. 6-1 TIPOS DE CIRCUITOS DE CONTROL Hay dos tipos básicos de circuitos de control: los de tres hilos y los de dos hilos. Estas designaciones derivan del hecho de que a la bobina del contactor llegan tres hilos en el primer caso y dos en el segundo (fig. 6-1). El circuito de control con tres hilos requiere que el dispositivo piloto primario sea del tipo de contacto momentáneo, tal como los pulsadores de contacto momentáneo. Los dispositivos de contacto permanente o mantenido, tales como los interruptores de límite y los interruptores de rotación, se pueden utilizar en varias partes del circuito para completar a los dispositivos del mando primario, de arranque y parada. Este tipo de control se caracteriza por el uso de un contacto auxiliar en el contactor para mantener cerrado el circuito de la bobina durante el tiempo en que el motor está en marcha o en funcionamiento normal. En el circuito de control de dos hilos, el dispositivo primario de mando o piloto primario debe ser de contacto mantenido, como puede ser un sencillo interruptor unipolar, una caja o panel de botones pulsadores de contacto mantenido, o cualquier tipo de componente de control que cierre un juego de contactos y los mantenga en esta posición durante todo el tiempo que el motor este funcionando. La apertura de este contacto o contactos causa el paro del motor al dejar sin corriente la bobina del arrancador. Todos los circuitos de control, independientemente de su complejidad, son simples variaciones y ampliaciones de los dos tipos básicos. El objeto de este capitulo es explicar cómo se pueden transformar y ampliar cada uno de estos circuitos básicos para el control deseado de un motor o de varios motores mediante la adición de pulsadores o de contactos activados Por uno o más M Parada Arranque 1 M 1 L 3 hilos M 2 hilos Contacto o interruptor OL OL OL OL 2 L 1 L 2 L Fig. 6-1. Circuitos básicos de control tipos dos y tres hilos 6 Desarrollo de los circuitos de control
- 23. Control de motores eléctricos Desarrollo de los circuitos de control dispositivos de control. Usaremos el esquema explicativo o en línea para desarrollar todos los circuitos de control a causa de que este tipo de esquema se presta con más facilidad al estudio y preparación de los circuitos de control. El método más sencillo para el desarrollo de un circuito de control es comenzar por la bobina del contactor y los dispositivos contra las sobrecargas. Se añade el dispositivo o piloto primario para el arranque y parada del motor, que en un circuito de tres hilos consiste generalmente en pulsadores ARRANQUE y PARADA utilizados conjuntamente con el contacto auxiliar del contactor. A este circuito se añaden sucesivamente todos los contactos o pulsadores que han de ser utilizados para realizar las funciones adicionales de control hasta que quede desarrollado el circuito final. Cuando se trata de un circuito de control de tres hilos hay que tener presente que todos los dispositivos destinados a realizar la función de parada deben ser dispositivos normalmente cerrados y estarán conectados en serie con el pulsador piloto primario de parada. Todos los dispositivos que han de realizar la función de arranque deben ser de contactos normalmente abiertos y estarán conectados en paralelo con el pulsador piloto primario de arranque. Algunas veces un circuito requiere que dos o más contactos normalmente abiertos se cierren antes de proceder a la puesta en marcha de un motor. Estos contactos, que igual pueden pertenecer a relés como a pulsadores u otros elementos de control, deben estar conectados en serie, y el conjunto en paralelo con los dispositivos primarios piloto de arranque. Si, por el contrario, varios contactos deben estar abiertos antes de realizar la función de parada, estos contactos normalmente cerrados se conectaran entre sí en paralelo y el conjunto en serie con el dispositivo piloto primario para producir el paro. Cuando haya una secuencia definida para la actuación de diversos componentes de control, habrá que añadirlos sucesivamente al circuito de control en el mismo orden que el que tiene su secuencia de funcionamiento. Después de añadir en el circuito cada contacto o cada pulsador hay que comprobar que el funcionamiento del circuito sea el correcto, comprobando que no se ha impedido el funcionamiento de algún componente de control ya existente. Si se ha asimilado la parte precedente de este libro, se tendrán los conocimientos necesarios de las funciones de control de los componentes y de los esquemas de circuito para comenzar a estudiar el modo de proyectar los circuitos de control. Hasta no haber proyectado un circuito que sea capaz de realizar las funciones asignadas, no se puede estar seguro de ser capaz de interpretar o analizar un circuito de control para saber con seguridad si funciona correctamente, es decir, realiza todas las funciones para las que ha sido proyectado. 6-2 PROYECTO DEL CIRCUITO 1 A fin de que el procedimiento del desarrollo por partes de un circuito resulte más fácil de entender, consideraremos nuestro primer circuito como una serie de modificaciones a realizar, una detrás de la otra, para perfeccionar las misiones de control del circuito original. El circuito de control existente (fig. 6- 2b) está destinado a controlar una bomba de agua para el transvase desde un depósito de almacenamiento basta un depósito regulador de presión. La disposición física de la bomba y de los dos tanques, así como los componentes de control, esta ilustrada en la figura 6-2a. El circuito original de maniobra manual, sólo dispone de pulsadores de arranque y parada y protección contra sobrecargas. La bomba debe funcionar hasta que se observe que el depósito está lleno. Entonces el operador debe accionar el pulsador de paro y la bomba dejará de funcionar. Ahora el propietario desea que se instale un interruptor de flotador en el depósito regulador de presión con el fin de evitar que el operador tenga que apretar el pulsador ARRANQUE, poniendo en marcha a la bomba e iniciando la entrada de agua en el depósito. Cuando el nivel de agua ha alcanzado el valor deseado, el interruptor de flotador FS1 abrirá sus contactos, produciéndose el paro de la bomba y cesando el flujo de agua. La función a realizar por el interruptor de flotador es en este caso la de paro, por la que debe ser de contacto normalmente cerrado y estar conectado en serie con el pulsador original de PARADA, tal como se ve en la figura 6-2c. Después de haber estado trabajando con este control durante algún tiempo, el propietario desea que la bomba arranque y pare automáticamente por considerarlo mucho mas cómodo y conveniente. Solicita que se instale otro interruptor de flotador para controlar el nivel inferior del depósito. Esta versión del circuito de control debe hacer que la bomba arranque siempre que el agua llegue a un nivel inferior predeterminado. La función de control deseada es la de arranque, de modo que el interruptor de flotador debe tener un juego de contactos normalmente abiertos que se cerrarán siempre que el agua descienda hasta el nivel inferior deseado. Estos contactos deben estar conectado en paralelo con el pulsador original ARRANQUE para realizar la función de arranque del motor. Esta conexión está representada en la figura 6-2d.
- 24. Control de motores eléctricos Desarrollo de los circuitos de control Después de algún tiempo de funcionamiento con el nuevo circuito de control, se descubre que algunas veces el nivel del depósito de almacenamiento desciende tanto que la bomba se desceba. El propietario solicita un control para evitar que la bomba arranque en estas condiciones. Aunque este control no tenga que parar la bomba mientras este funcionando, debe impedir que arranque cuando el nivel del agua es bajo. Debe también parar la bomba si esta esta funcionando y el agua llega a este nivel mínimo. Así, el nuevo control realiza la función de parar la bomba. La función de control se puede obtener por la instalación de un interruptor de flotador para detectar el nivel inferior del agua en el depósito de almacenamiento. El interruptor de flotador FS3 ha sido instalado y ajustado para abrir un juego de contactos siempre que el agua del depósito de almacenamiento alcanza el nivel mínimo deseado. A causa de que la función de control a realizar es la de parada, el interruptor de flotación FS3 debe tener contactos normalmente cerrados que se abran siempre que el nivel del agua baje hasta el nivel ajustado del interruptor de flotador. Está conectado en serie con los otros componentes de parada, como muestra la figura 6-2e. Después se decidió que la presión producida en la tubería por el tanque regulador de presión cuando esta lleno es insuficiente para las necesidades de la instalación. El propietario solicita la instalación de los componentes y controles necesarios para mantener en el depósito la presión mediante aire a presión en la parte superior del depósito. A fin de obtener el debido equilibrio del nivel del agua y de la presión del aire en todo instante, solo debe quedar aire en el depósito cuando el nivel del agua este en su posición más alta y la presión sea inferior a la deseada. Para conseguir esto, supongamos que instalamos una válvula de solenoide en la tubería de suministro de aire que permita el paso del aire al depósito solamente cuando la bobina de la válvula del solenoide esta excitada. Además de la válvula, podemos instalar un interruptor de presión en la parte superior del tanque para que detecte la presión existente en este constantemente. Cuando la presión sea inferior a la ajustada en el interruptor de presión, sus contactos se deben cellar, cerrando el circuito del solenoide. Sin embargo, si el nivel del agua es inferior al máximo cuando la presión desciende, no debe abrir la válvula de solenoide por lo que se requiere la función de parada de la misma, a fin de evitar que el aire entre en el depósito cuando no es conveniente.
- 25. Control de motores eléctricos Desarrollo de los circuitos de control Si el interruptor de flotador ESl es del tipo bipolar con un juego de contactos normalmente abierto y otro normalmente cerrado, podemos modificar el circuito según muestra la figura 6-2f. El circuito de la válvula de solenoide es del tipo de dos hilos y requiere que FS1 y el interruptor de presión PS1 se cierren para que entre aire en el depósito por la acción de la de la válvula de solenoide. Cuando el nivel del agua alcanza su punto más bajo será activado FS1. El contacto normalmente cerrado del circuito de bomba se abrirá y el contacto normalmente abierto del circuito de solenoide se cerrará. Si la presión del aire es baja, los contactos de PS1 se cerrarán y el aire entrará en el depósito hasta que el nivel del agua descienda y se abra FS1, o bien hasta que, la presión aumente hasta su valor normal y se abra PS1 satisfaciéndose así los requisitos del circuito de control especificados por el propietario de la instalación . Aunque en el circuito de la figura 6-2f han quedado los pulsadores en el circuito, será preferible que el operador pueda optar a voluntad por funcionamiento completamente manual o funcionamiento completamente automático. Los cambios necesarios para funcionamiento manual o automático están indicados en el circuito de la figura 6-2g. Si hubiésemos asumido la responsabilidad de proyectar el circuito final de la figura 6-2g, necesitaríamos ciertas especificaciones o requisitos en cuanto a la función o el funcionamiento correcto del circuito completo. El primero de ellos sería probablemente la posibilidad de selección de control manual o automático, el segundo que la bomba fuese controlada para mantener el nivel de agua en el depósito de presión entre un nivel superior y otro inferior, y el tercero que pudiese funcionar la bomba cuando los niveles del agua en el depósito de aprovisionamiento fuesen inferiores a un nivel dado, y cuarto, que la presión en el depósito de presión se mantuviese mediante la adición de aire siempre que fuese necesario. Para proyectar el circuito a base de estas especificaciones, se procederá por etapas, añadiendo componentes de control al circuito manual original. 6-2 PROYECTO DEL CIRCUITO 2 Nuestro segundo circuito será para el control de tres transportadores de cinta combinados de modo que el transportador 1 descargue material en el transportador 2, el cual a su vez lo descarga en el transportador 3, que se utiliza para la carga de camiones a otros vehículos en un muelle de embarque o en un almacén. Las condiciones que debe cumplir el circuito de control son: 1. Con un solo pulsador deben ponerse en marcha todos los motores de transportador pero de forma que primero lo haga el 3, luego el 2 y por último el 1. 2. Cualquier sobrecarga en alguno de los transportadores hará que se paren todos ellos. 3. Un solo pulsador de parada servirá para parar todos los transportadores de forma que primero lo haga el 1, luego el 2 y por último el 3. Un requisito adicional es que haya un retardo de 2 minutos entre la parada de cada transportador y el siguiente a fin de que el material quede desalojado de cada transportador antes de que se pare. Si realizamos el proyecto de este circuito por partes, nuestra primera etapa será satisfacer los requisitos de la especificación 1 para que un solo botón arranque todos los transportadores en secuencia empezando por el transportador 3. El circuito adecuado para esto será el de la figura 6-3a. Tenemos en él un relé de control que es activado y desactivado mediante pulsadores según el circuito de tres hilos, manteniéndose activado durante el funcionamiento por un contacto auxiliar (contacto de retención) del mismo relé de control, identificado en el dibujo por las tetras CR1. Puesto que es necesario que el transportador 3 sea el primero que empiece a funcionar, los contactos identificados en el dibujo por CR1, que son cerrados por el relé de control, activan el contactor M3 que pondrá en marcha el motor 3 y cerrará el contacto M3 que a su vez excitará el contactor M2, que pondrá en marcha el motor 2 y cerrará el contactor M2, activándose el M1 con lo que se arrancará el motor 1 terminándose la secuencia de arranque del transportador. El paro se producirá desactivando el relé CR mediante el pulsador de paro. El uso de los contactos CR2, M3 y M2 satisface la condición de que el transportador 2 arranque luego del 3 y el 1 luego del 2, con lo que quedan cumplidas las condiciones de la especificación 1 en correspondencia con la especificación 2, la cual requiere que cualquier sobrecarga en un transportador pare a todos ellos. Las condiciones de la especificación 2 pueden ser obtenidas mediante la conexión en serie de todos los contactos de los relés de sobrecarga entre la línea y la conexión común a todas las bobinas de arrancador, incluida la del relé de control, como indica la figura 6-3a. Si uno o más de estos seis contactos de los relés de sobrecarga están abiertos, el circuito de control de todas las bobinas está interrumpido, desexcitándose así las bobinas y parándose todos los motores
- 26. Control de motores eléctricos Desarrollo de los circuitos de control de transportador al mismo tiempo. Con esto se cumplen los requisitos de la especificación 2. Aunque el circuito de la figura 6-3a satisface las especificaciones primera y segunda, no satisface las condiciones de la especificación 3 de que los transportadores se paren en orden inverso. Este requisito y el de que transcurra un tiempo de retardo de 2 minutos entre la parada de un transportador y el siguiente hace necesario el empleo de relés temporizadores. Lo primero que a uno se le ocurre es conectarlos como indica la figura 6-3b, pero un cuidadoso estudio de este circuito revela que cuando es empujado el pulsador PARADA, el relé de CR se desexcitará, abriéndose los contactos CR1 y CR2, con lo que sólo se desexcitará el relé de control a causa de que el contacto M2 está todavía cerrado manteniendo el circuito de la bobina M1, de que el contacto M3 está también aún cerrado manteniendo el circuito de la bobina M2 y de que también el contacto de R2 está cerrado manteniendo el circuito de la bobina M3. Así, pues, todos los motores de transportador continuarán funcionando. Habrá que hacer una modificación de este circuito a fin de que todos los transportadores puedan ser parados actuando sobre el pulsador PARADA. A fin de satisfacer la condición 3 de las especificaciones, deberá ser modificado el circuito de la figura 6-3b como indica la figura 6-3c. En este circuito hemos añadido dos contactos, normalmente abiertos, activados por el relé de control y designados en el dibujo por CR3 y CR4. Ahora, cuando se presiona el pulsador PARADA, el relé de control se desexcita, abriéndose todos sus contactos, quedando excitados los contactores M2 y M1 solamente a través de los contactos de los relés temporizados que se mantienen cerrados debido justamente al retardo de acción diferida de estos relés. La apertura del contacto CR3 interrumpe el circuito de la bobina M1, parando al transportador 1, y al de la bobina TR1 del relé de retardo que producirá la separación de los contactos TR1 transcurridos dos minutos desde que se haya desexcitado dicho relé temporizado TR1. Esto hará que el contactor M2 y el relé temporizado TR2 se desexciten. El primero ocasionará el paro del motor 2 y el segundo la apertura, dos minutos más tarde, del contacto TR2, lo cual desexcitará M3 produciéndose el paro del último motor y parándose el transportador 3. De este modo quedan satisfechas todas las especificaciones de este circuito. Los transportadores arrancarán en secuencia, comenzando por 3 y progresando hasta 1 cuando se empuja el pulsador único de ARRANQUE. Cualquier sobrecarga en un transportador desexcitará las bobinas de todos los arrancadores, parándose todos los transportadores. Cuando se aprieta el botón PARADA, los transportadores se pararán en orden inverso con un intervalo de 2 minutos entre la parada de un transportador y el siguiente.