
Recomendados
Más contenido relacionado
Más de velezgjuand07
Diseño de un brazo robot
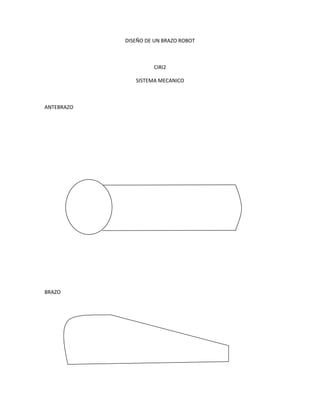
- 1. DISEÑO DE UN BRAZO ROBOT CIRI2 SISTEMA MECANICO ANTEBRAZO BRAZO
- 2. DEBAJO DEL BRZO L=3,3 cm L L DETRA DEL BRAZO A=1,3 cm L=4,1 cm L A FRENTE DE LA CAJA A= 8,3 cm , L=2 cm BASE DE ENGRANAJE DEL BRAZO L= 2cm L= 3cm A=2,8 cm A=2,8cm Radio de los círculos r= 0,4 cm
- 3. DISEÑO DE UN BRAZO ROBOT CIRI2 SISTEMA MECANICO ANTEBRAZO BRAZO
- 4. DEBAJO DEL BRZO L=3,3 cm L L DETRA DEL BRAZO A=1,3 cm L=4,1 cm L A FRENTE DE LA CAJA A= 8,3 cm , L=2 cm BASE DE ENGRANAJE DEL BRAZO L= 2cm L= 3cm A=2,8 cm A=2,8cm Radio de los círculos r= 0,4 cm