Descargado 179 veces

![MANIPULADORES DE ROBOTS. 05/30/2014
EDSON J GARCIA ITCM 2
Introducción
El termino robot proviene de la palabra checa ‖robota‖ y
significa trabajo, fue introducido en nuestro vocabulario
por el dramaturgo Karel Capek en 1921 en su novela
satírica Rossums Universal Robots, donde describe al
robot, como un máquina que sustituye a los seres
humanos para ejecutar tareas sin descanso, a pesar de
esto, los robots se vuelven contra sus creadores
aniquilando a toda la raza humana. Desde aquel
entonces prácticamente a cualquier sistema mecánico
con movimiento se le llama robot.
Existen varias definiciones para describir a un robot,
entre las que proporciona una mejor descripción es la
adoptada por el Robot Institute of America (RIA) la cual
establece:
―Un robot es un manipulador multifuncional
reprogramable diseñado para mover materiales partes,
herramientas o dispositivos especializados a través de
movimientos programados para la ejecución de una
variedad de tareas‖.
Esta definición data desde 1980, refleja el estado actual
de la tecnología en robótica.
Desde el punto de vista científico, los robots
manipuladores como objetos de estudio frecen un
amplio espectro en la formulación de problemas teórico
prácticos debido a la naturaleza no línea y multi variable
de su comportamiento dinámico. Los robots han tenido
Karel Čapek [ˈkarɛl ˈʧapɛk]
(MaléSvatoňovice, Bohemia, I
mperio austrohúngaro, 9 de
enero de 1890 —
Praga, Checoslovaquia, 25
de diciembre de 1938) fue
uno de los escritores
en lengua checa más
importantes del siglo XX.
Acuñó el moderno concepto
de robot. Pese a la leyenda,
el término se lo farfulló su
hermano Josef entre pinceles
cuando Karel le preguntaba
sobre cómo llamar a esos
seres de su nueva obra
teatral. La
palabra robot deriva de la
forma robota (según algunos
del término r´b del antiguo
eslavo y que significa
"esclavo" o bien del checo
robota "trabajo"). El caso es
que el término aparece por
primera vez en su obra de
teatro R.U.R. (Robots
Universales Rossum),
en 1920, tras cuyo estreno y
éxito en Praga y
posteriormente en Londres y
Nueva York hizo que se
introdujera en todas las
lenguas.](https://image.slidesharecdn.com/manipuladoresderobots-140530130909-phpapp01/85/Manipuladores-de-robots-3-320.jpg)











![MANIPULADORES DE ROBOTS. 05/30/2014
EDSON J GARCIA ITCM 26
En general, la aplicación de la robótica a estos sectores se caracteriza por la
falta de estructuración tanto del entorno como de la tarea a realizar, y la menor
importancia de criterios de rentabilidad económica frente a la de realizar tareas en
entornos peligrosos o en los que no es posible el acceso de las personas.
Estas características obligan a que los robots de servicio cuenten con un mayor grado
de inteligencia, que se traduce en el empleo de sensores y del software adecuado para
la toma rápida de decisiones. Puesto que en muchas ocasiones el estado actual de la
inteligencia artificial (disciplina que aborda esta problemática) no está lo
suficientemente desarrollado como para resolver las situaciones planteadas a los
robots de servicio, es frecuente que éstos cuenten con un mando remoto, siendo en
muchas ocasiones robots teleoperados.
Centros de investigación en robótica, como la Universidad
Carnegie-Mellon o el Jet Propulsion Laboratory (JPL) en Estados Unidos, han orientado
desde hace tiempo buena parte de sus esfuerzos de investigación en robótica en esta
línea, desarrollando robots especializados, capacitados para trabajar en el exterior, en
entornas no estructurados y peligrosos (superficie de planetas, volcanes, desastres
nucleares, etc.). Muchos de estos sistemas responden en buena medida a los
conceptos de telemanipulador o robot teleoperado, que quedan fuera de los objetivos
de este texto, remitiéndose al lector a textos especializados [SHERIDAN-92]. Para dar
una idea general de las posibilidades de la robótica en estos sectores, se van a
comentar algunas aplicaciones concretas en las que el robot ha aportado mejoras y
beneficios al proceso primitivo.](https://image.slidesharecdn.com/manipuladoresderobots-140530130909-phpapp01/85/Manipuladores-de-robots-27-320.jpg)
![MANIPULADORES DE ROBOTS. 05/30/2014
EDSON J GARCIA ITCM 28
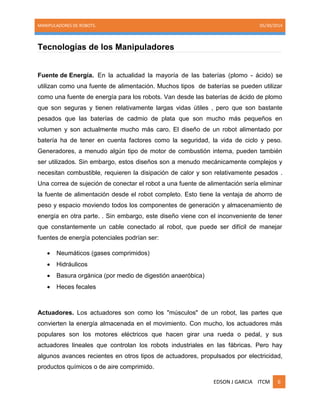
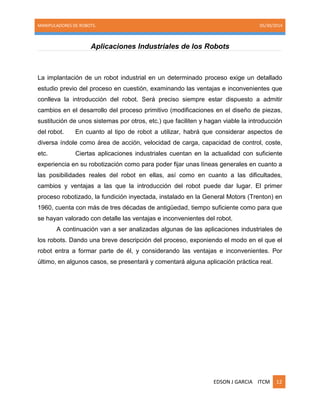
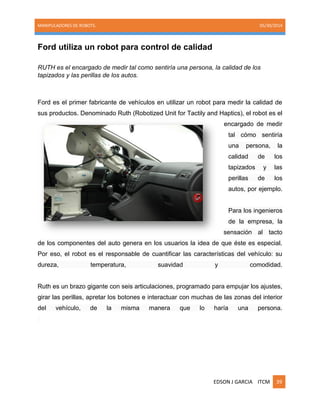
Manipulación de residuos radioactivos
Como se indicó en el Capítulo 1, los primeros sistemas teleoperados, desarrollados por
el Argonne National Laboratory (ANL) tuvieron como objetivo la manipulación de
productos radioactivos sin riesgo para el ser humano.
La industria nuclear genera una cantidad considerable de residuos radioactivos
de baja contaminación (vestimentas, envases de plástico, papel, etc.) o de alta (restos
de las células del reactor, materiales en contacto directo prolongado con las zonas
radiactivas, etc.). La forma, tamaño y peso de estos desechos es variable y su
manipulación tiene por objetivo final su envase en contenedores especiales, que son
posteriormente transportados y almacenados (lo que origina una nueva problemática).
Para manipular remotamente estos residuos se hace uso tanto de tele
manipuladores con unión mecánica y seguimiento directo del proceso por parte del
operador a través de un cristal (caso de baja contaminación), como con sistemas con
mando remoto por radio o cable en el caso de contaminación elevada. Estos
manipuladores permiten la flexibilidad necesaria para manipular elementos de peso
variable y forma no definida (incluso no rígidos).
Además, es preciso considerar la importancia que tiene la optimización del
espacio ocupado por los residuos en su almacenamiento, por lo que antes de su
envasado en los contenedores puede ser preciso fragmentarlos [LARcomBE-84],
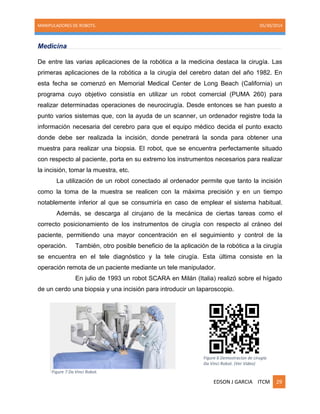
Figure 4 Robot CMU Snake para inspeccion de tuberia.
Figure 5 Snake Robot,
Nuclear Plant Inspection (Ver
Video)](https://image.slidesharecdn.com/manipuladoresderobots-140530130909-phpapp01/85/Manipuladores-de-robots-29-320.jpg)








El documento describe los manipuladores de robots, incluyendo su tecnología, aplicaciones y clasificación. Los manipuladores de robots se usan ampliamente en la industria para automatizar procesos de manufactura. Algunas aplicaciones comunes incluyen soldadura, paletización y montaje. La tecnología de los manipuladores incluye fuentes de energía como baterías, motores eléctricos y neumáticos, y sensores como cámaras y sensores táctiles.









































































