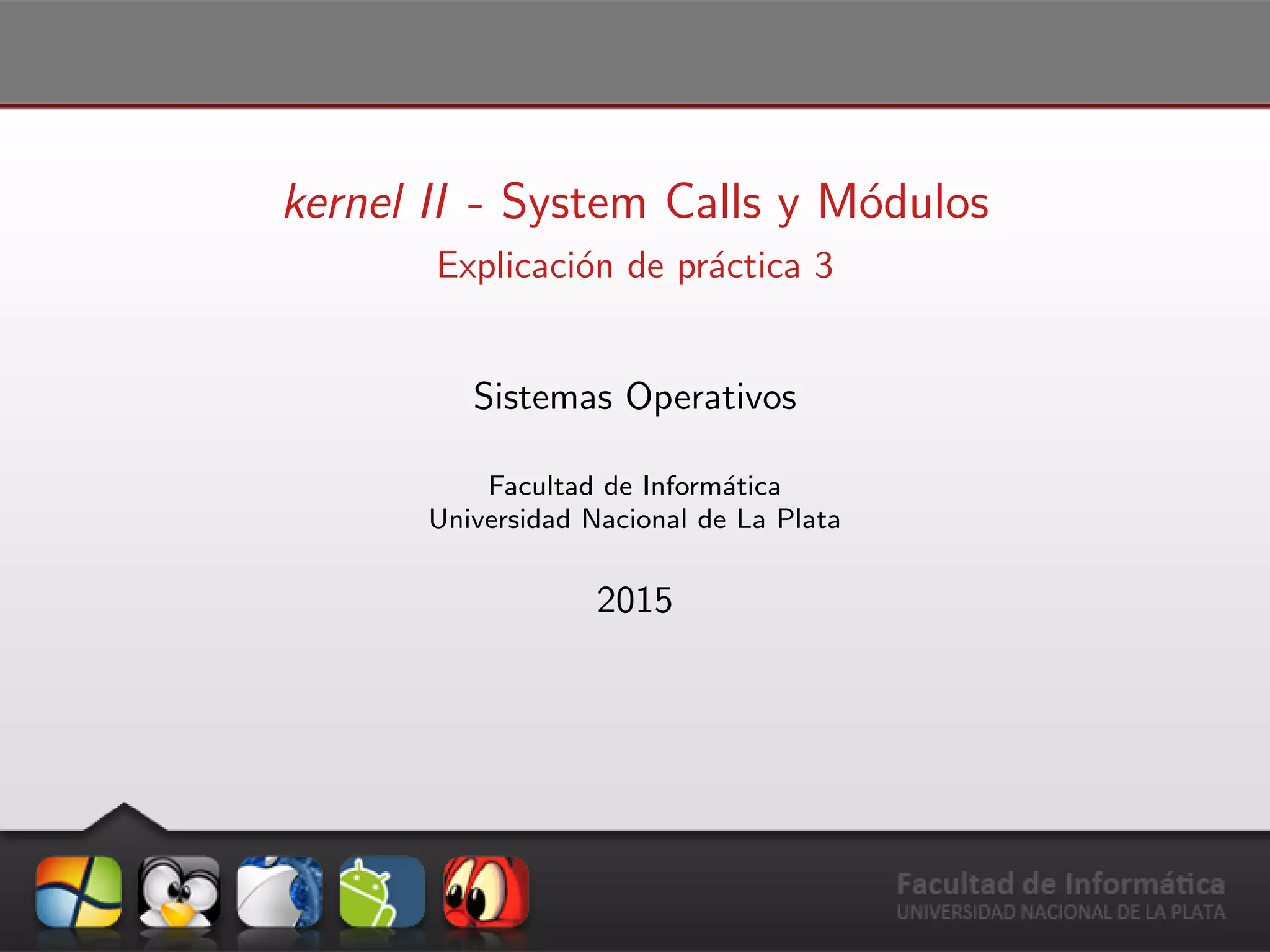



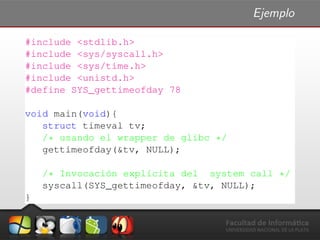
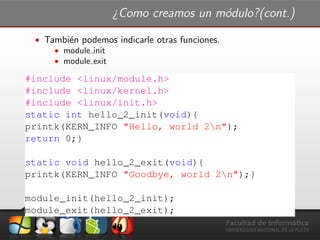
![Strace
ˆ Reporta las system calls que realiza cualquier programa
ˆ man strace
ˆ Opci´on ´util -f (tiene en cuenta procesos hijos)
strace a.out (hola mundo)
execve(”./a.out”, [”./a.out”], [/* 62 vars */]) = 0
brk(0) = 0x1295000
access(/etc/ld.so.nohwcap”, F OK) = -1 ENOENT (No such file
or directory)
mmap(NULL, 8192, PROT READ—PROT WRITE,
MAP PRIVATE—MAP ANONYMOUS, -1, 0) = 0x7f3b70b43000
access(/etc/ld.so.preload”, R OK) = -1 ENOENT (No such file or
directory)](https://image.slidesharecdn.com/main-150425075730-conversion-gate02/85/Linux-Kernel-System-Calls-Modules-Drivers-24-320.jpg)

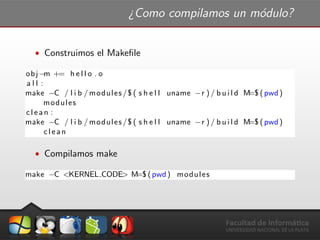
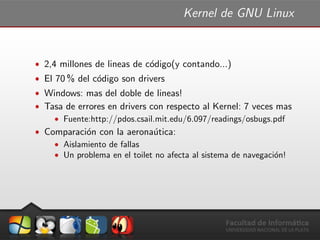
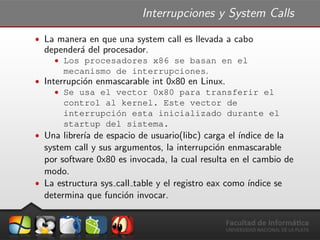
![Dispositivos en UNIX
ˆ Major y Minor device number.
ˆ Los dispositivos se dividen en n´umeros llamados major device
number. Ej: los discos SCSI tienen el major number 8.
ˆ Cada dispositivo tiene su minor device number. Ejemplo:
/dev/sda major number 8 y minor number 0
ˆ Con el major y el minor number el kernel identifica un
dispositivo.
ˆ kernel code/linux/Documentation/devices.txt
# l s −l /dev/hda [1 −3]
brw−rw−−−− 1 root d i s k 3 , 1 Abr 9 15:24 /dev/hda1
brw−rw−−−− 1 root d i s k 3 , 2 Abr 9 15:24 /dev/hda2
brw−rw−−−− 1 root d i s k 3 , 3 Abr 9 15:24 /dev/hda3](https://image.slidesharecdn.com/main-150425075730-conversion-gate02/85/Linux-Kernel-System-Calls-Modules-Drivers-33-320.jpg)
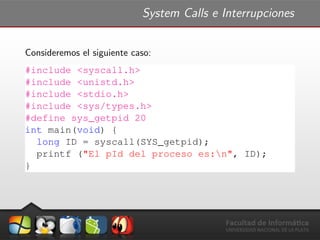
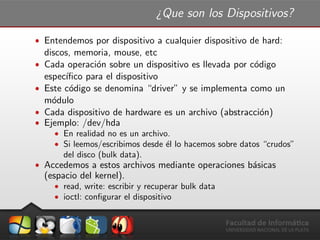
![Archivos de dispositivos en UNIX
ˆ Representaci´on de los dispositivos(device files)
ˆ Por convenci´on est´an en el /dev
ˆ Se crean mediante el comando mknod.
mknod[− m<mode >] f i l e [ b | c ] major minor
ˆ b o c: seg´un se trate de dispositivos de caracter o de bloque.
ˆ El minor y el major number lo obtenemos de
kernel code/linux/Documentation/devices.txt](https://image.slidesharecdn.com/main-150425075730-conversion-gate02/85/Linux-Kernel-System-Calls-Modules-Drivers-34-320.jpg)

Este documento resume los conceptos clave de los sistemas operativos, incluyendo: 1) El kernel, system calls y módulos; 2) Cómo las system calls permiten a los procesos de usuario acceder a funciones del kernel; 3) Los módulos extienden la funcionalidad del kernel sin necesidad de recompilarlo. También explica los dispositivos y cómo los controlan los drivers implementados como módulos del kernel.

















![Desarrollo de rootkits en Linux [GuadalajaraCON 2013]](https://cdn.slidesharecdn.com/ss_thumbnails/basicrootkitsgnulinux-130524135359-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















































