




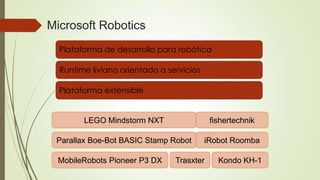

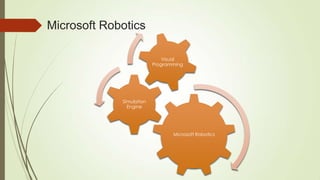
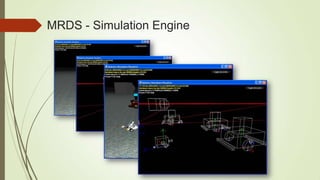



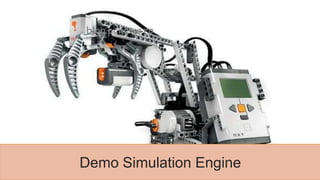
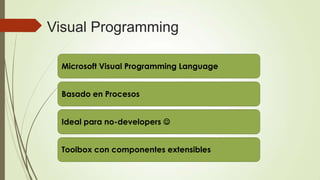
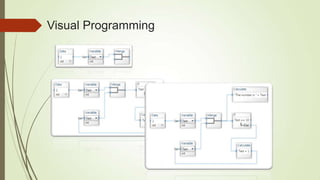




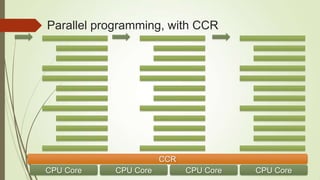
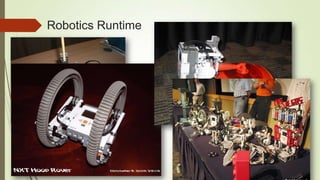

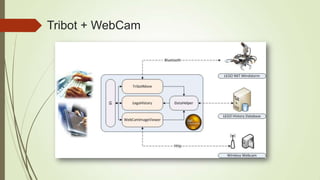




Este documento presenta las capacidades de Microsoft Robotics Developer Studio (MRDS) para el desarrollo de robots. MRDS proporciona una plataforma de desarrollo ligera orientada a servicios, simulación de robots, programación visual y tiempo de ejecución para robots. El documento demuestra varios proyectos de robots creados con MRDS, incluidos robots simulados, Tribot controlado por webcam y un robot Lego NXT controlado con C#.






















































