Descargar para leer sin conexión
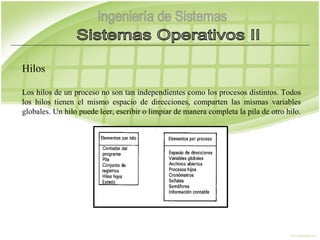

Este documento describe los hilos de ejecución o subprocesos, que permiten a una aplicación realizar múltiples tareas de forma concurrente compartiendo recursos como memoria y archivos. Los hilos permiten simplificar el diseño de aplicaciones que deben llevar a cabo funciones simultáneas de forma más eficiente que procesos independientes. Finalmente, se indica que los hilos dentro de un mismo proceso comparten espacio de direcciones y variables globales, y pueden afectar las pilas de otros hilos.















































