
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (14)
Más de diegoalejopuliro123
Último
Último (15)
calibracion
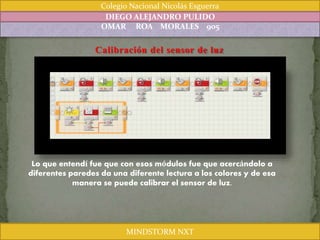
- 1. Calibración del sensor de luz Colegio Nacional Nicolás Esguerra DIEGO ALEJANDRO PULIDO OMAR ROA MORALES 905 MINDSTORM NXT Lo que entendí fue que con esos módulos fue que acercándolo a diferentes paredes da una diferente lectura a los colores y de esa manera se puede calibrar el sensor de luz.
- 2. Estos son las lecturas de el sensor de luz 29 18 22 21 28 48 26 51 28 44 17 36 28 19 27 21 32 49 33 55 26 46