Descargar para leer sin conexión


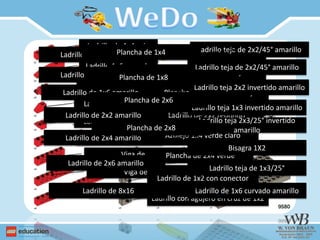

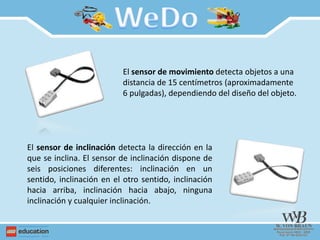

Este documento lista una variedad de piezas de LEGO, incluyendo minifiguras, ladrillos, vigas, planchas y elementos electrónicos como motores, sensores y un hub USB. Los elementos electrónicos incluyen un motor programable, un sensor de movimiento y un sensor de inclinación que detecta la dirección y ángulo de inclinación.





















































