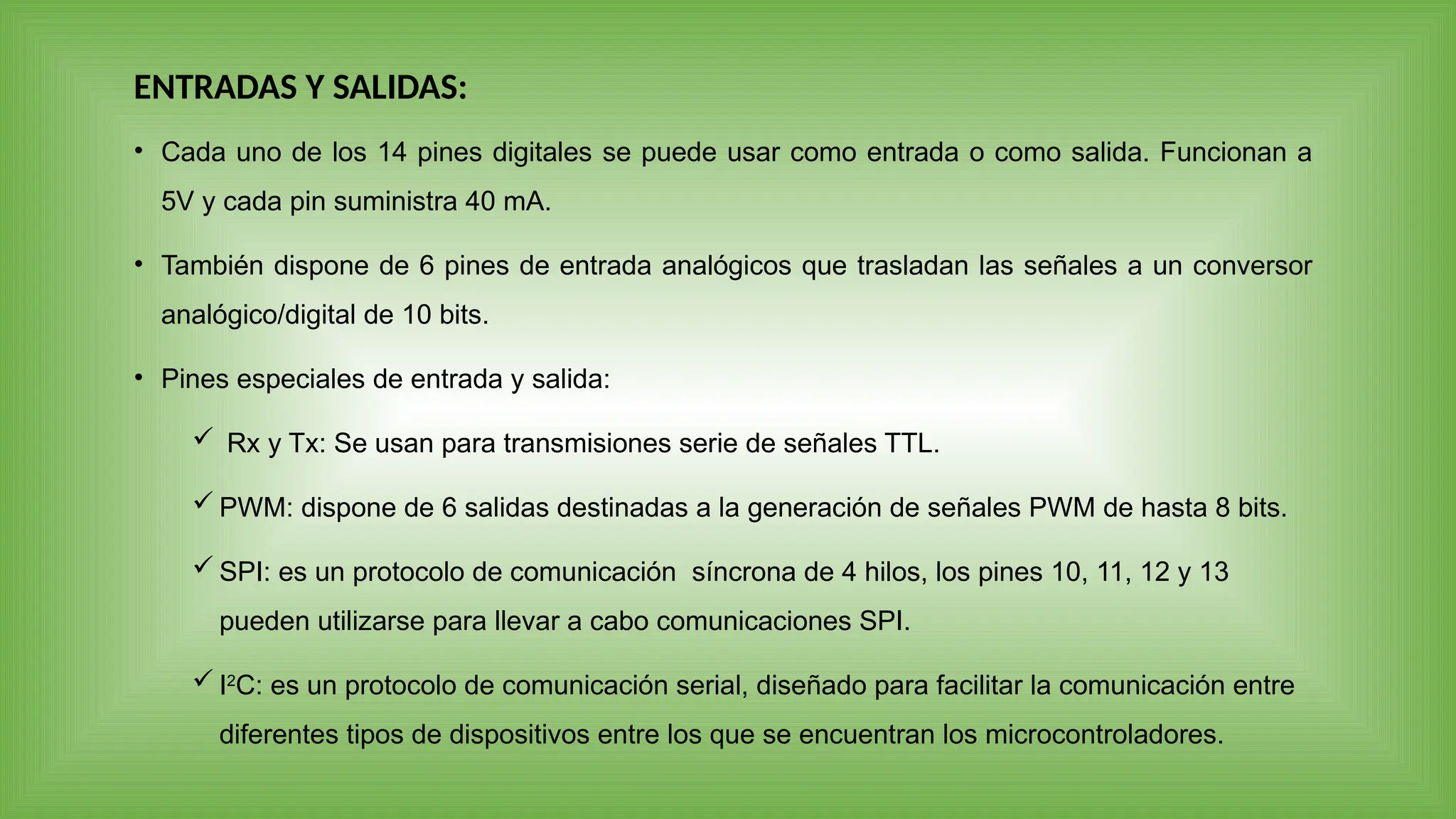
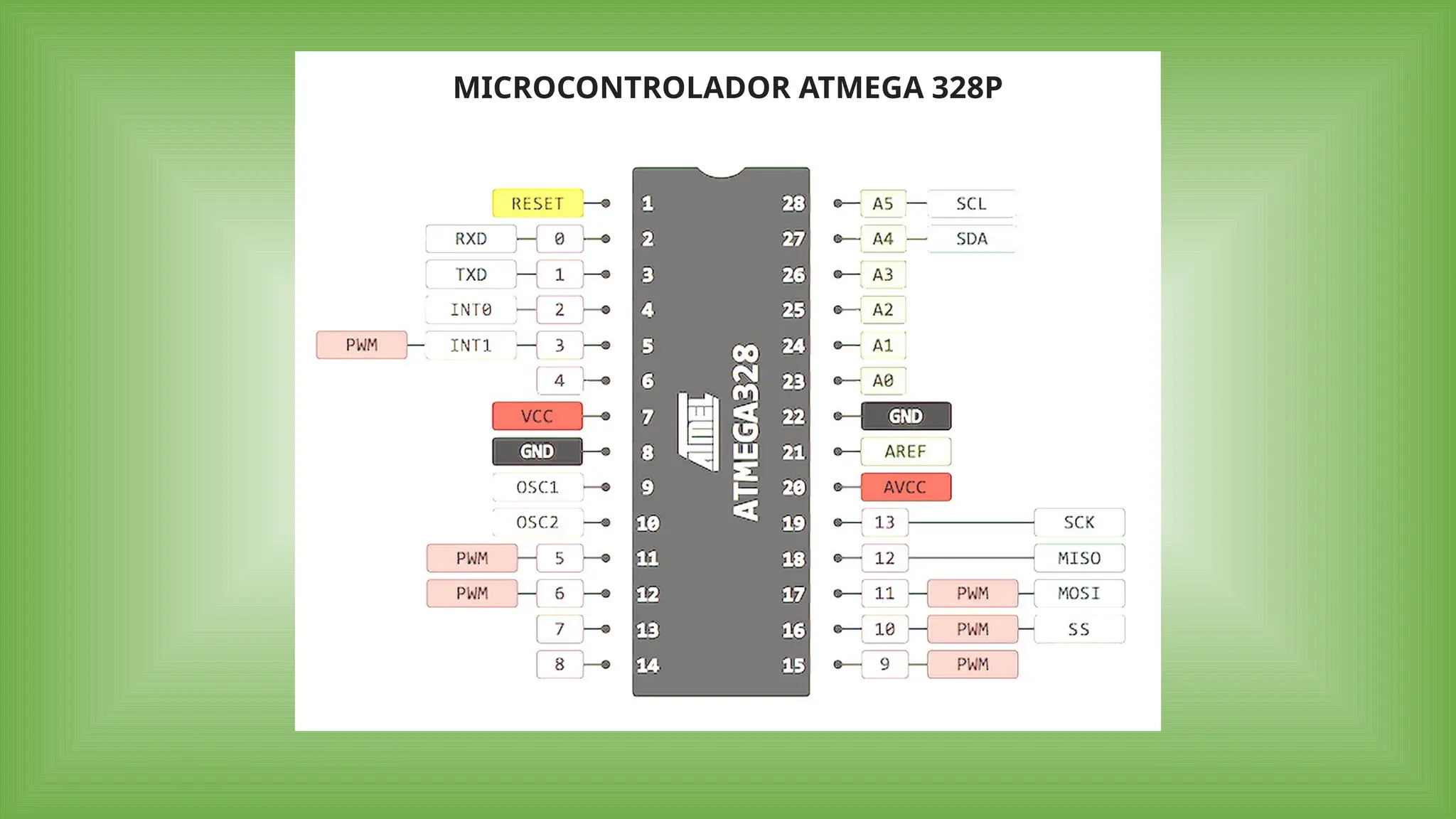
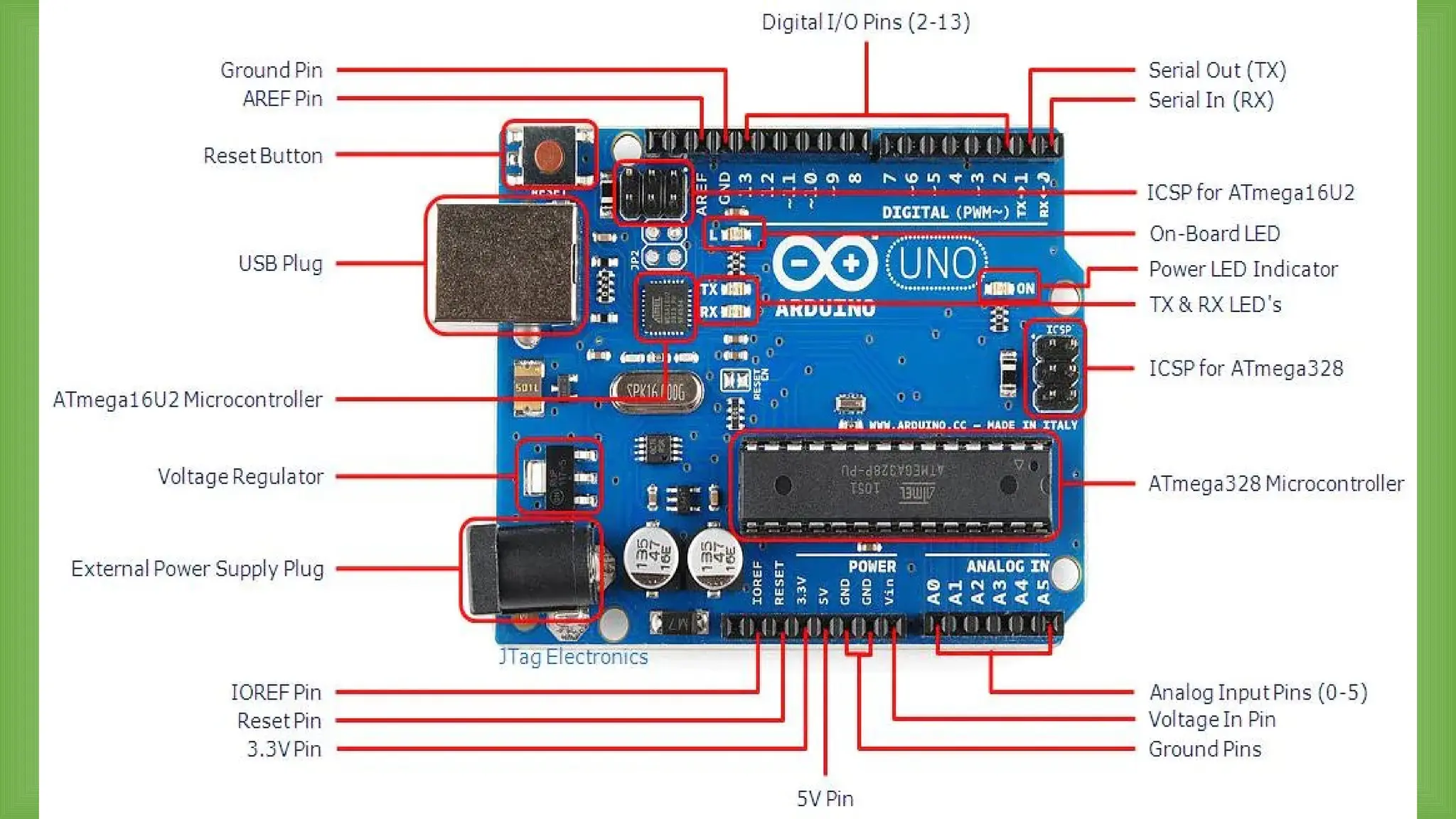
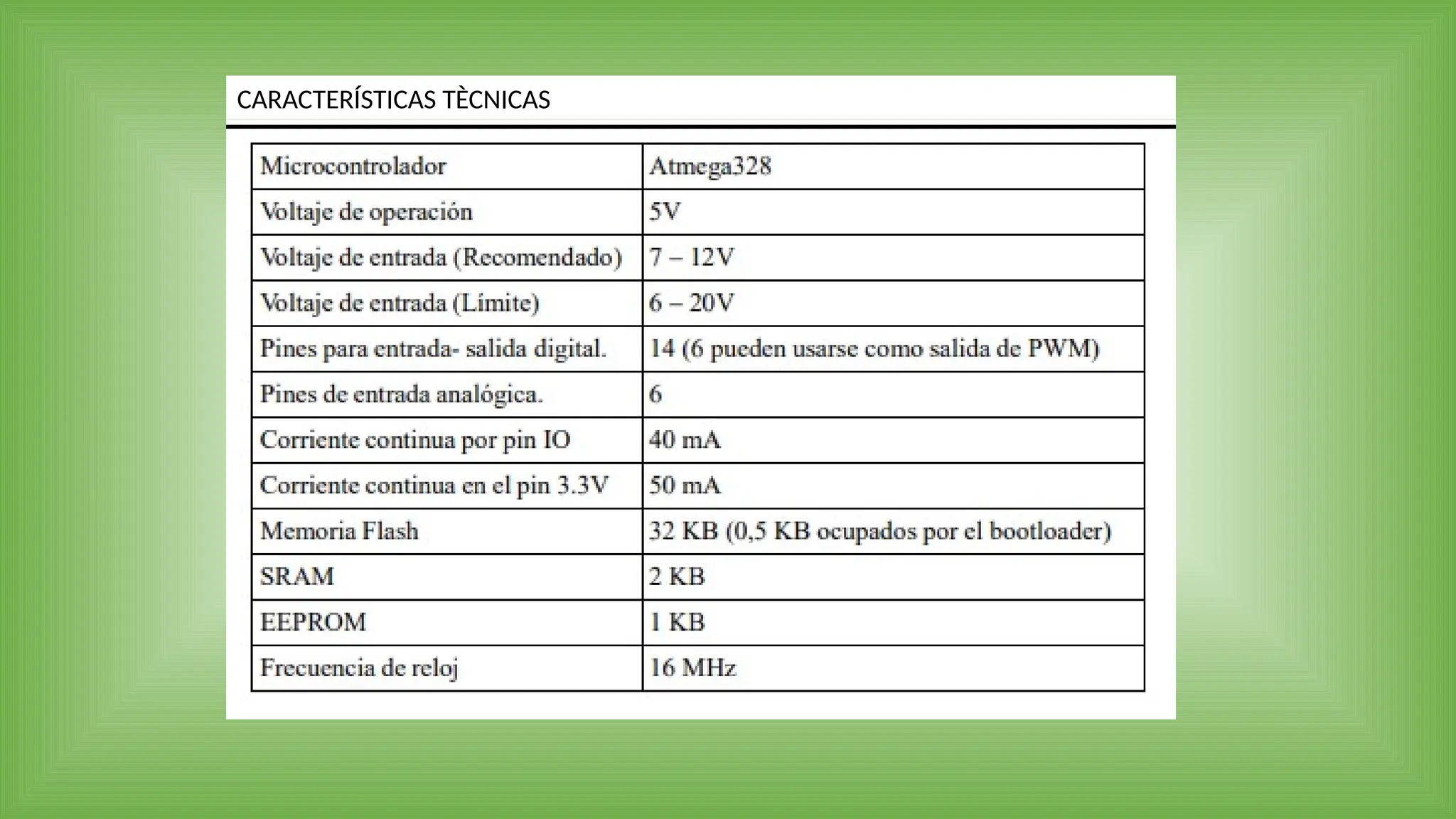
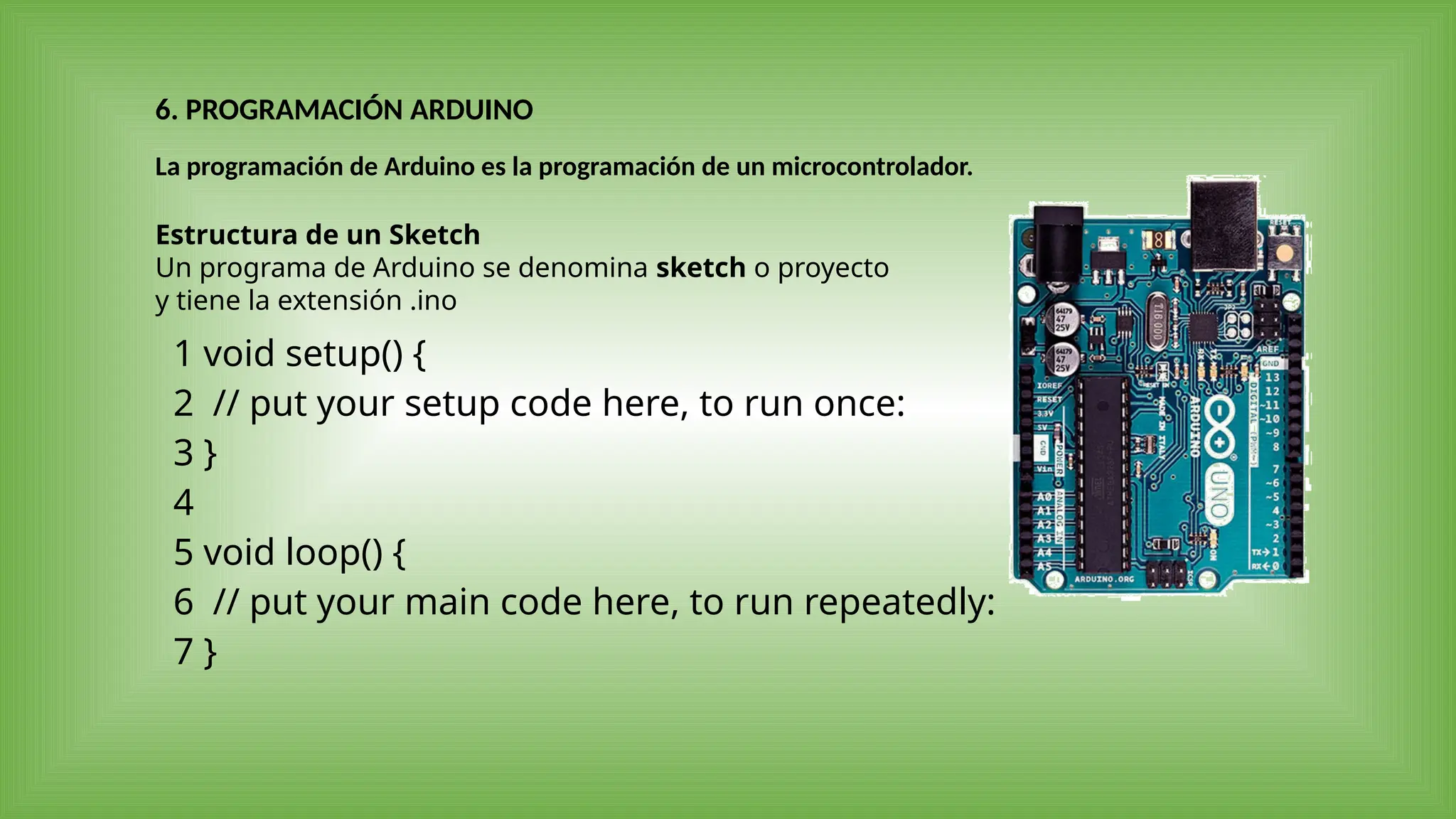
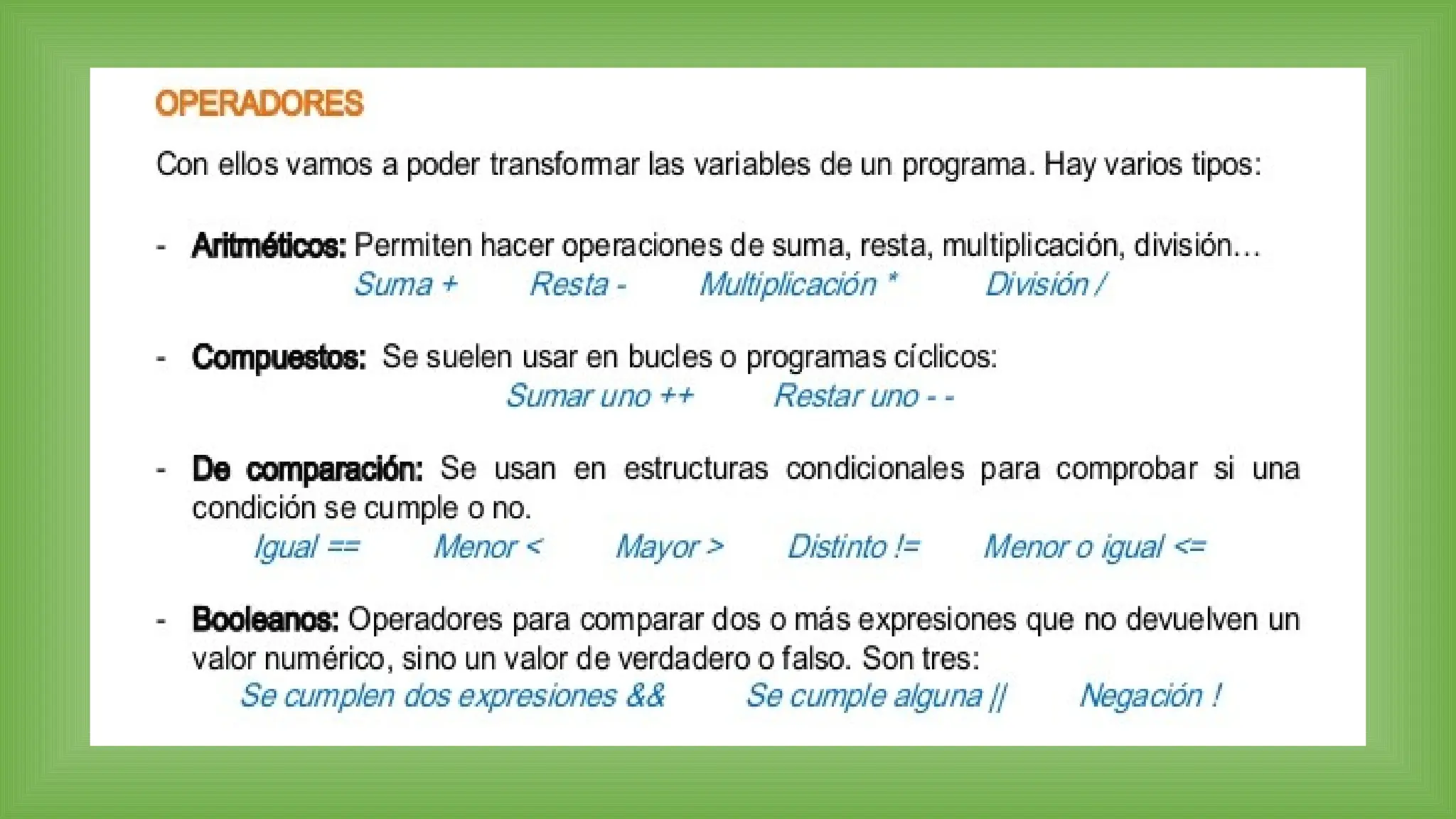
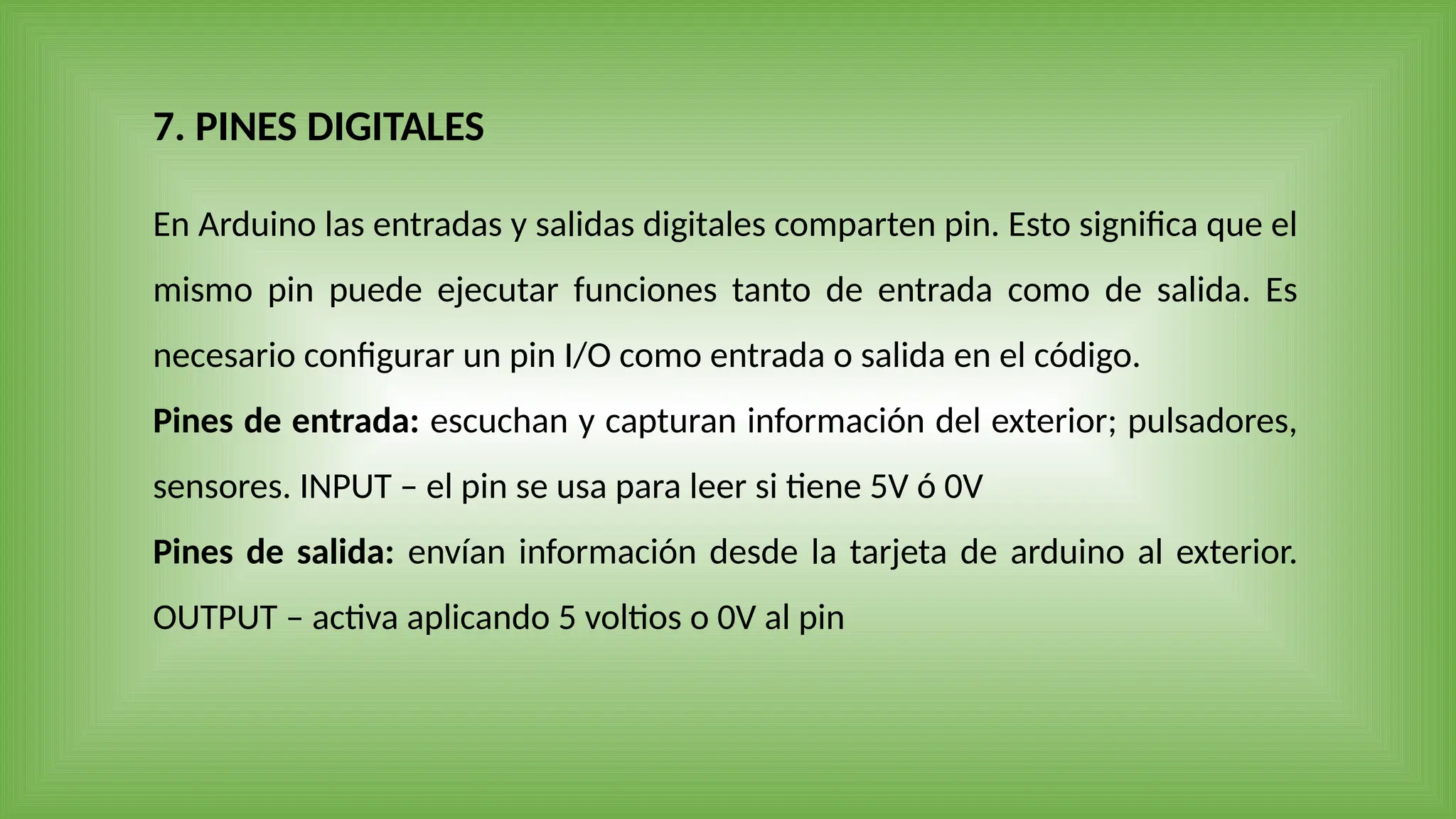
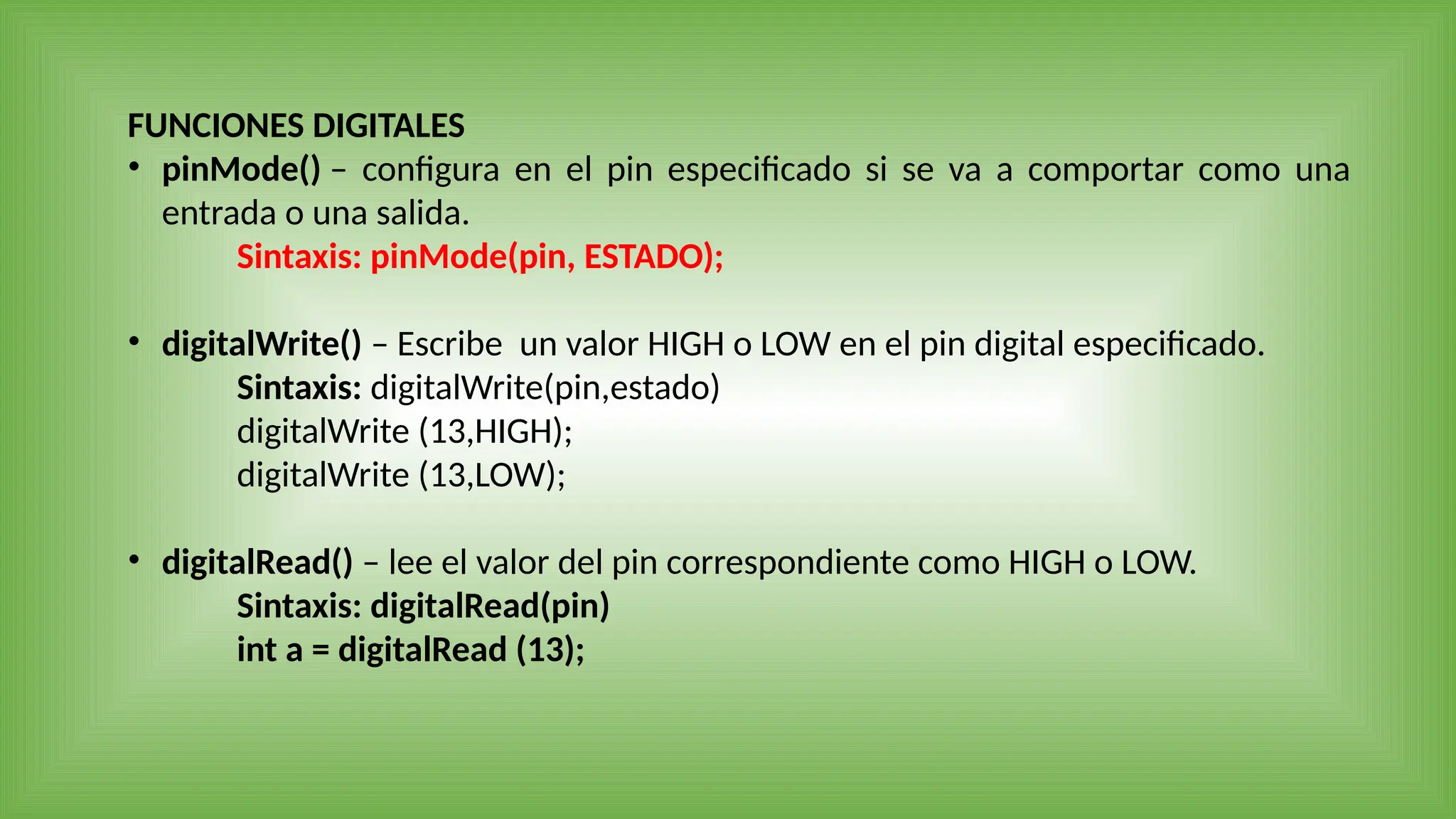
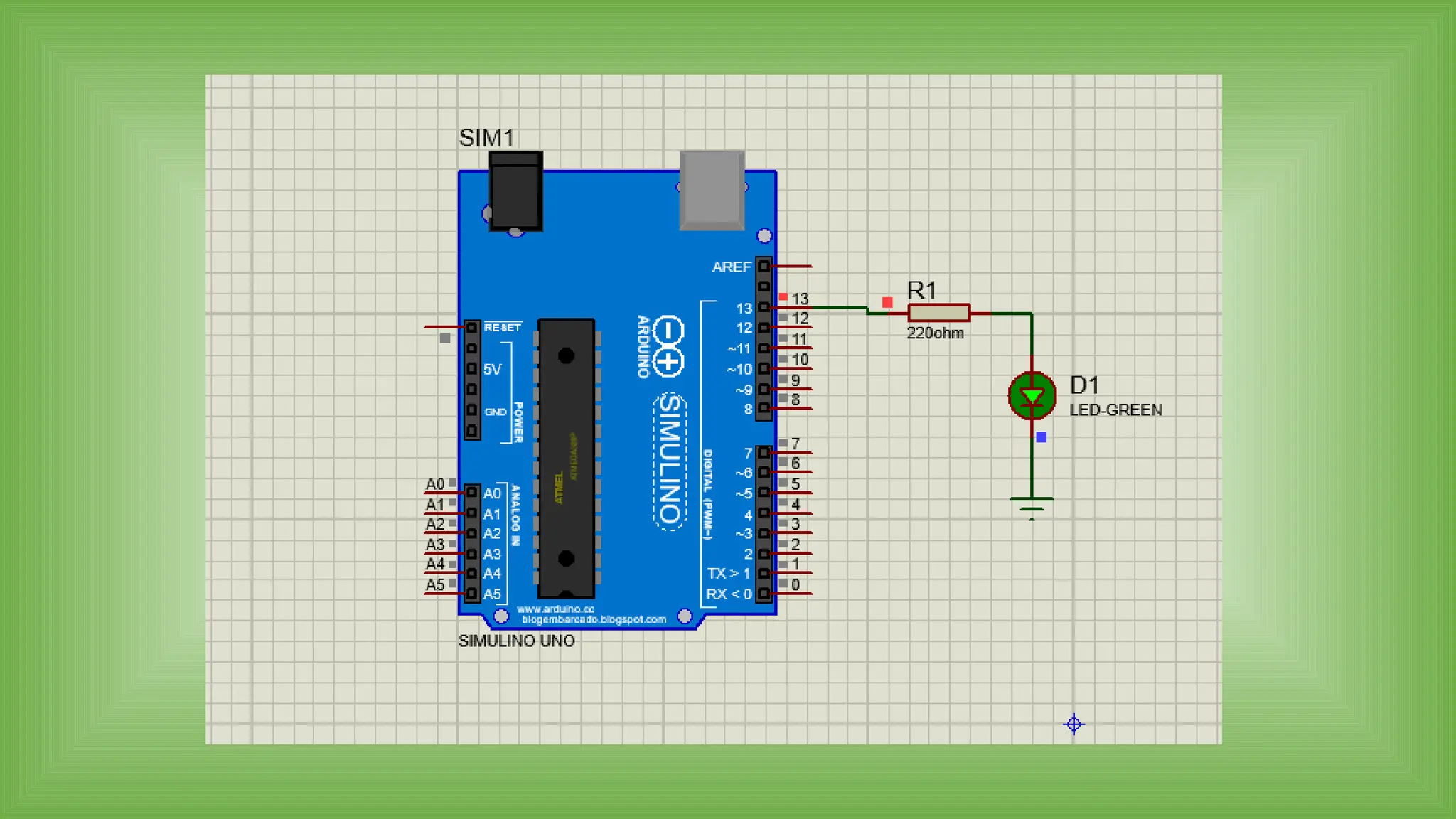
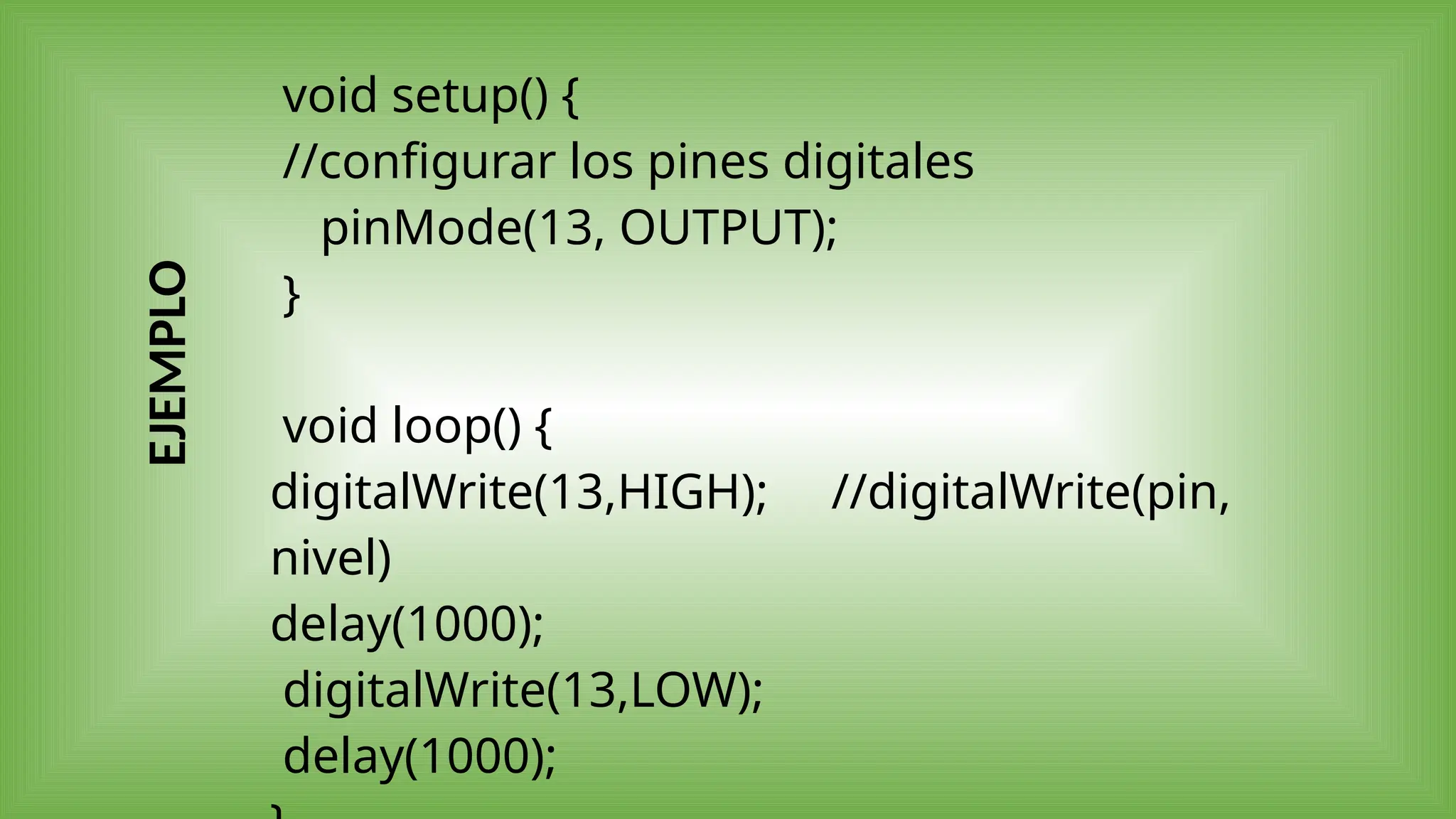
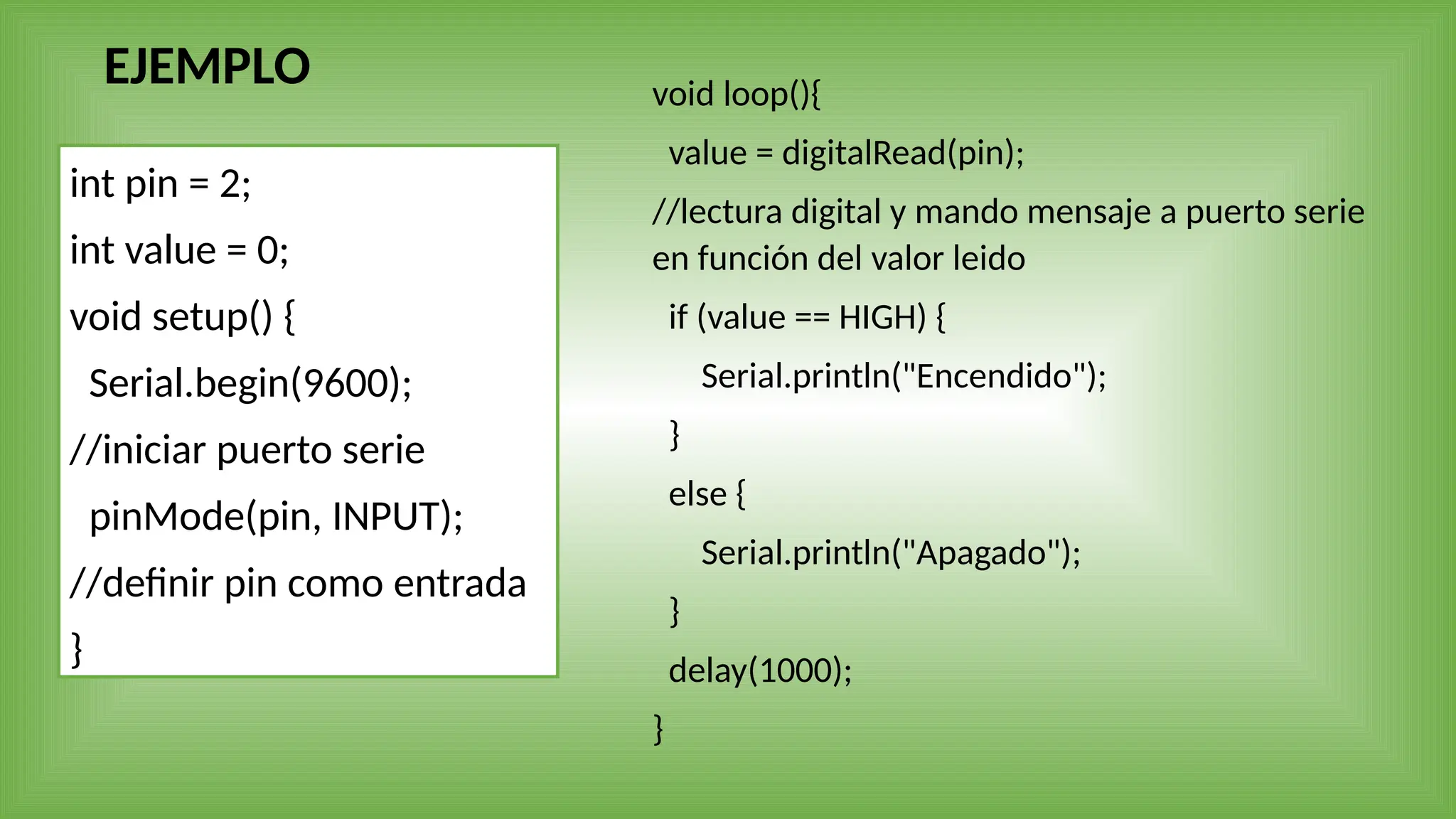
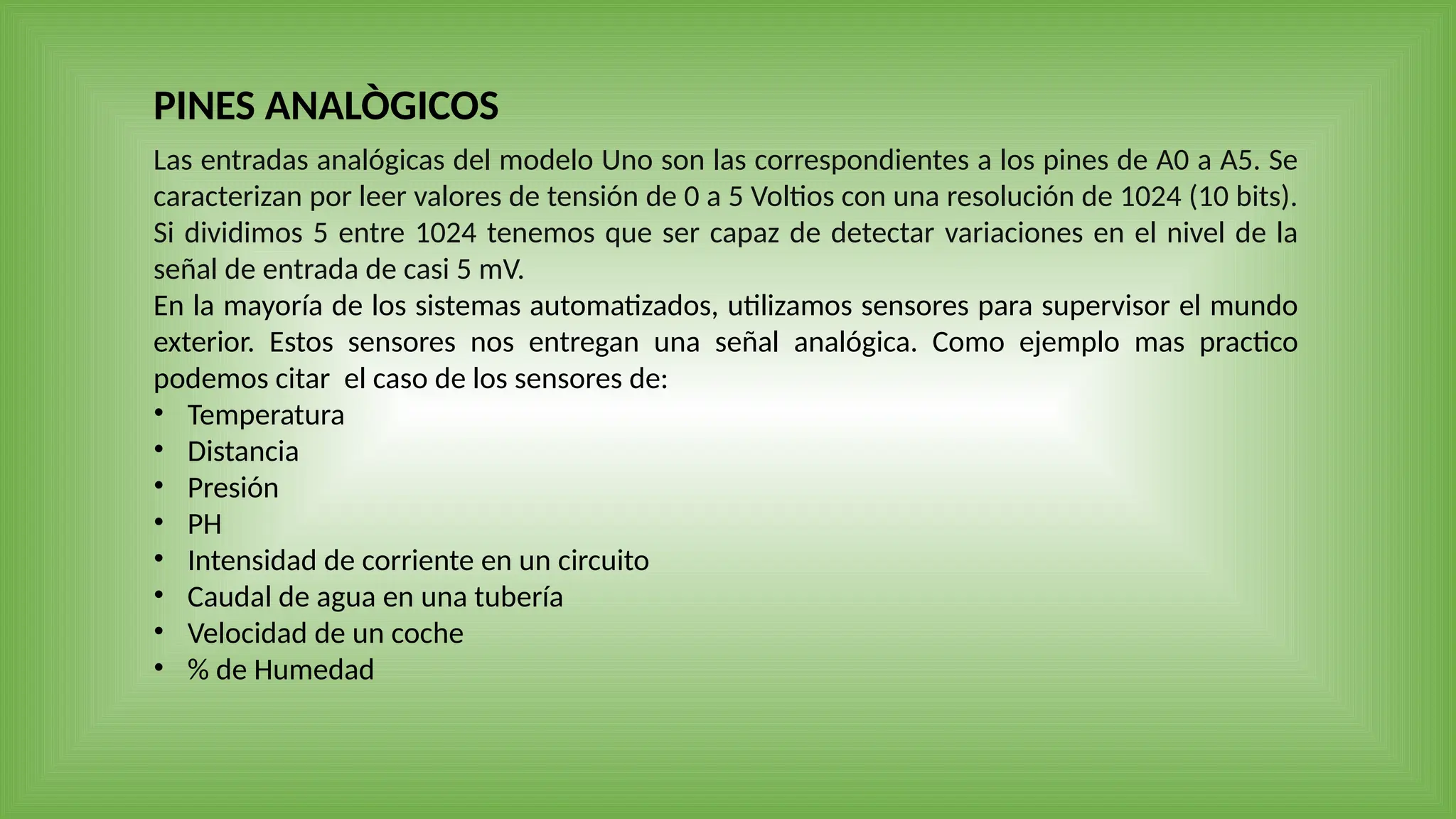
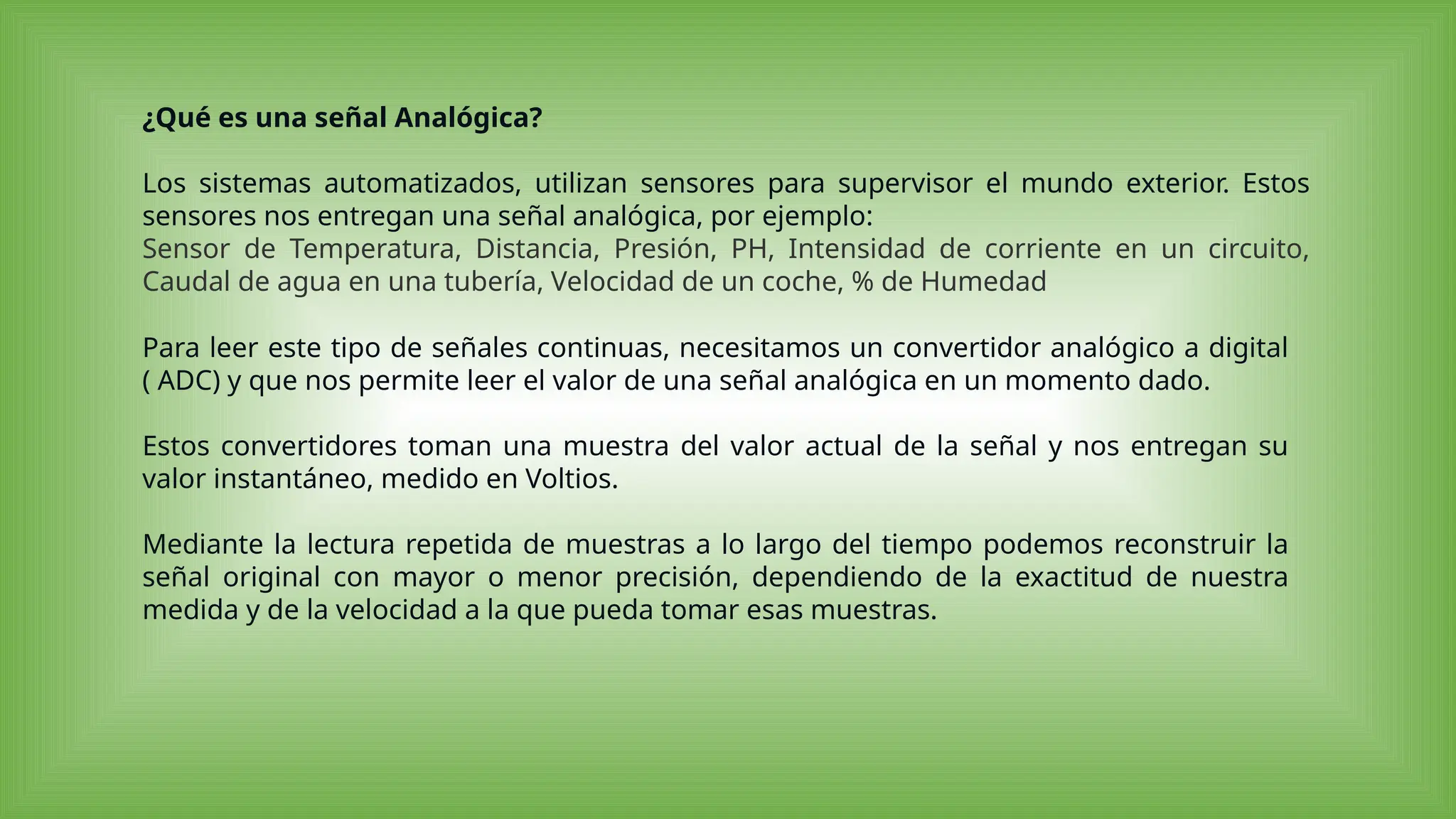
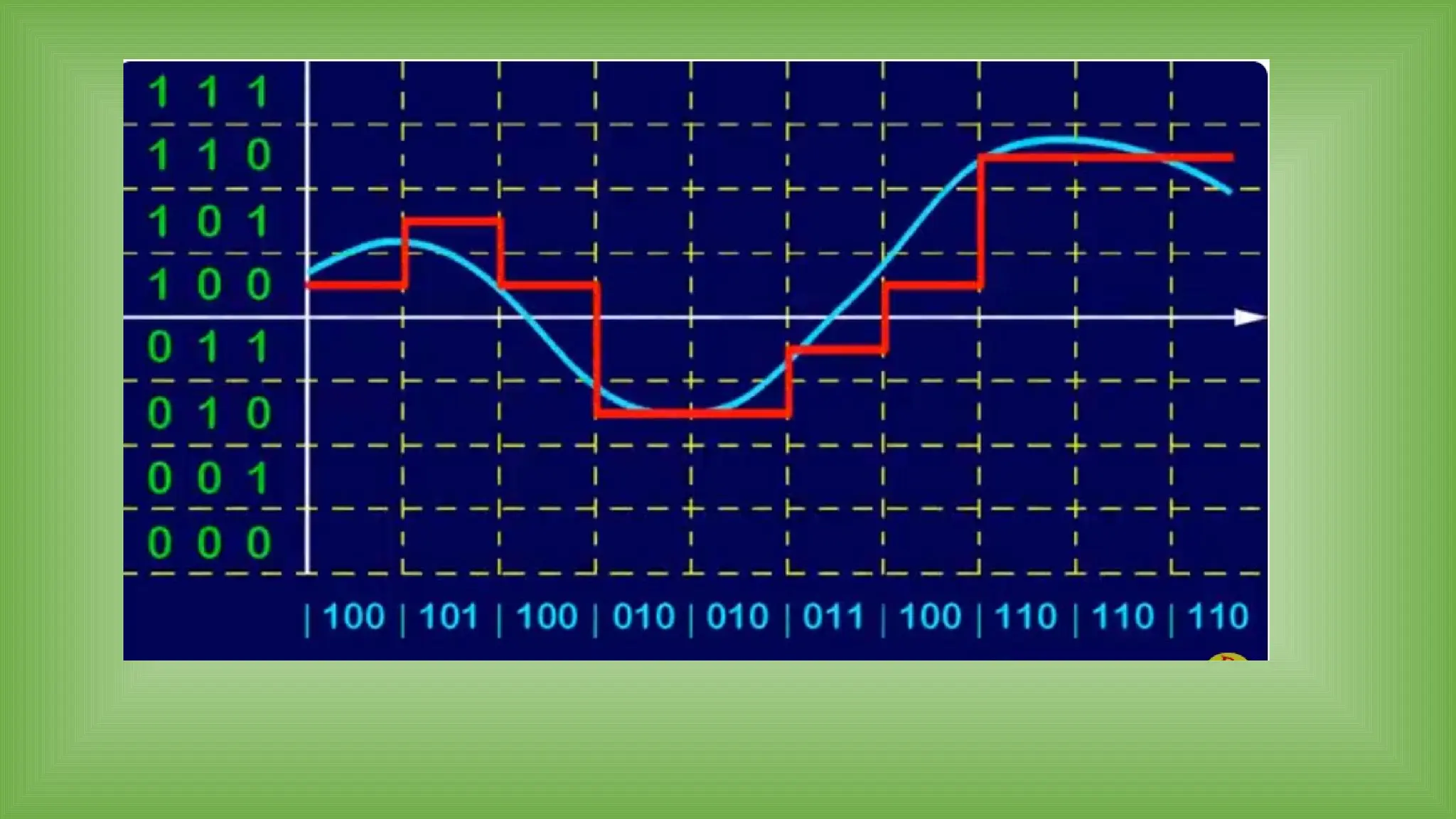
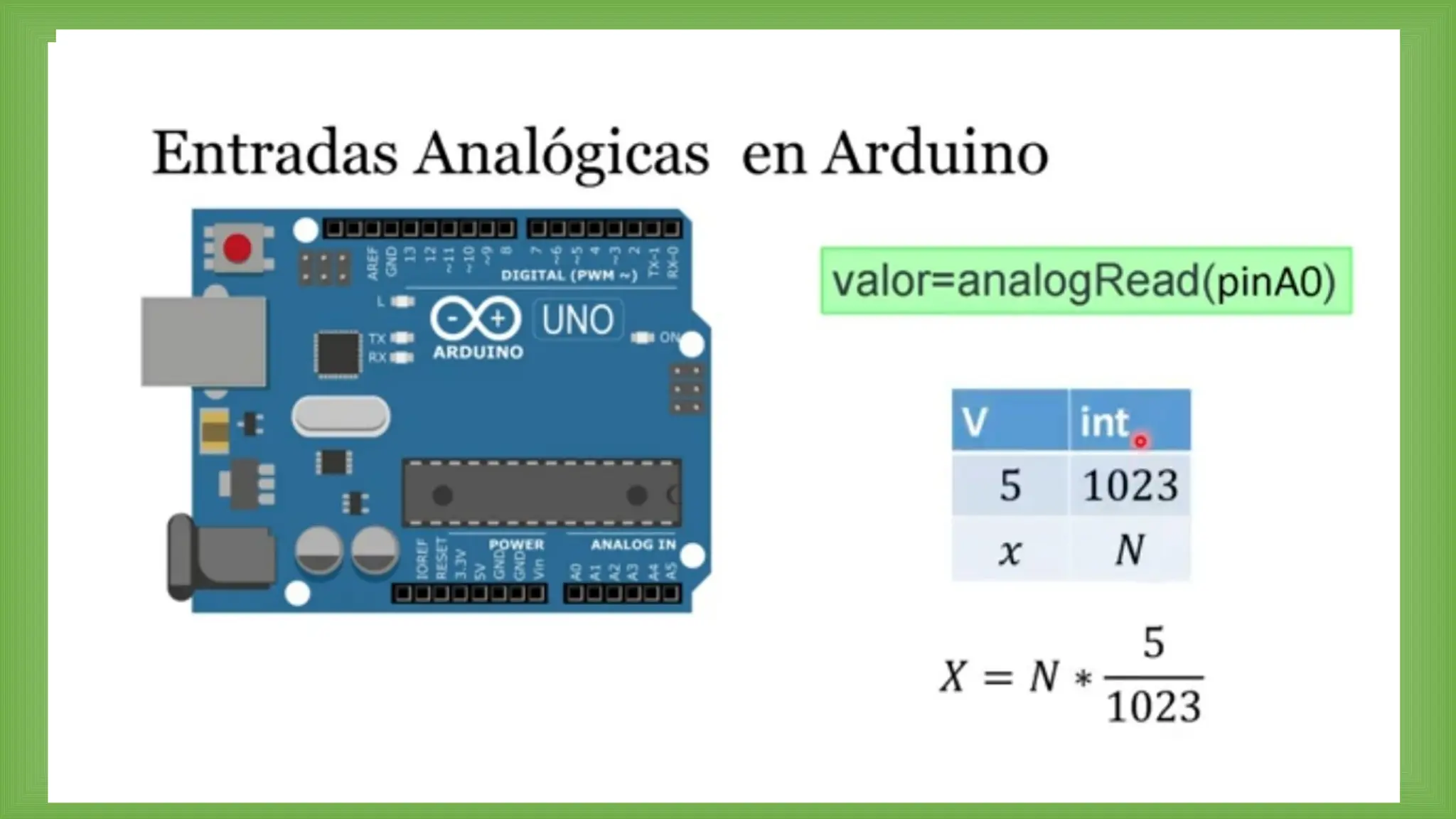
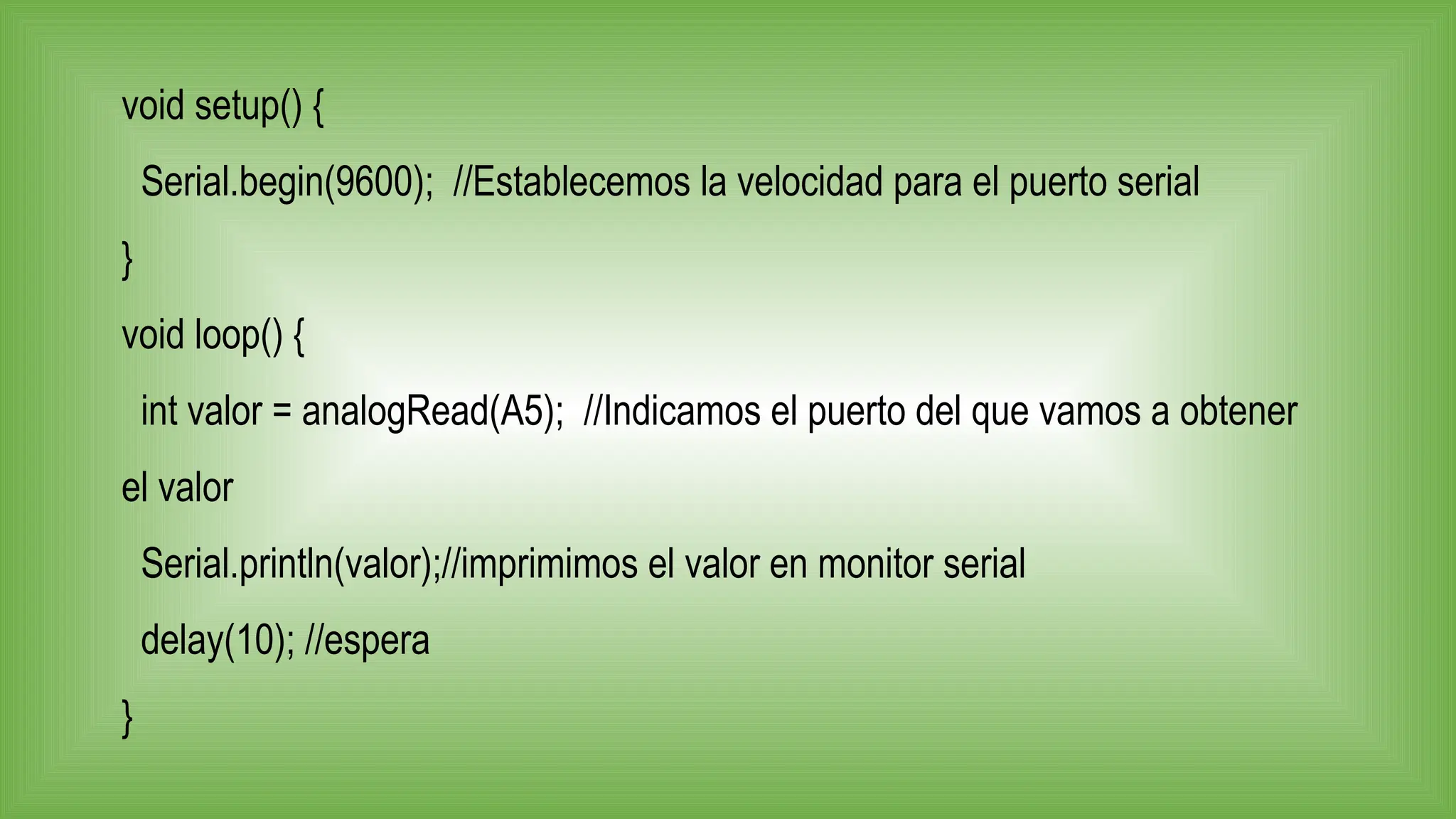
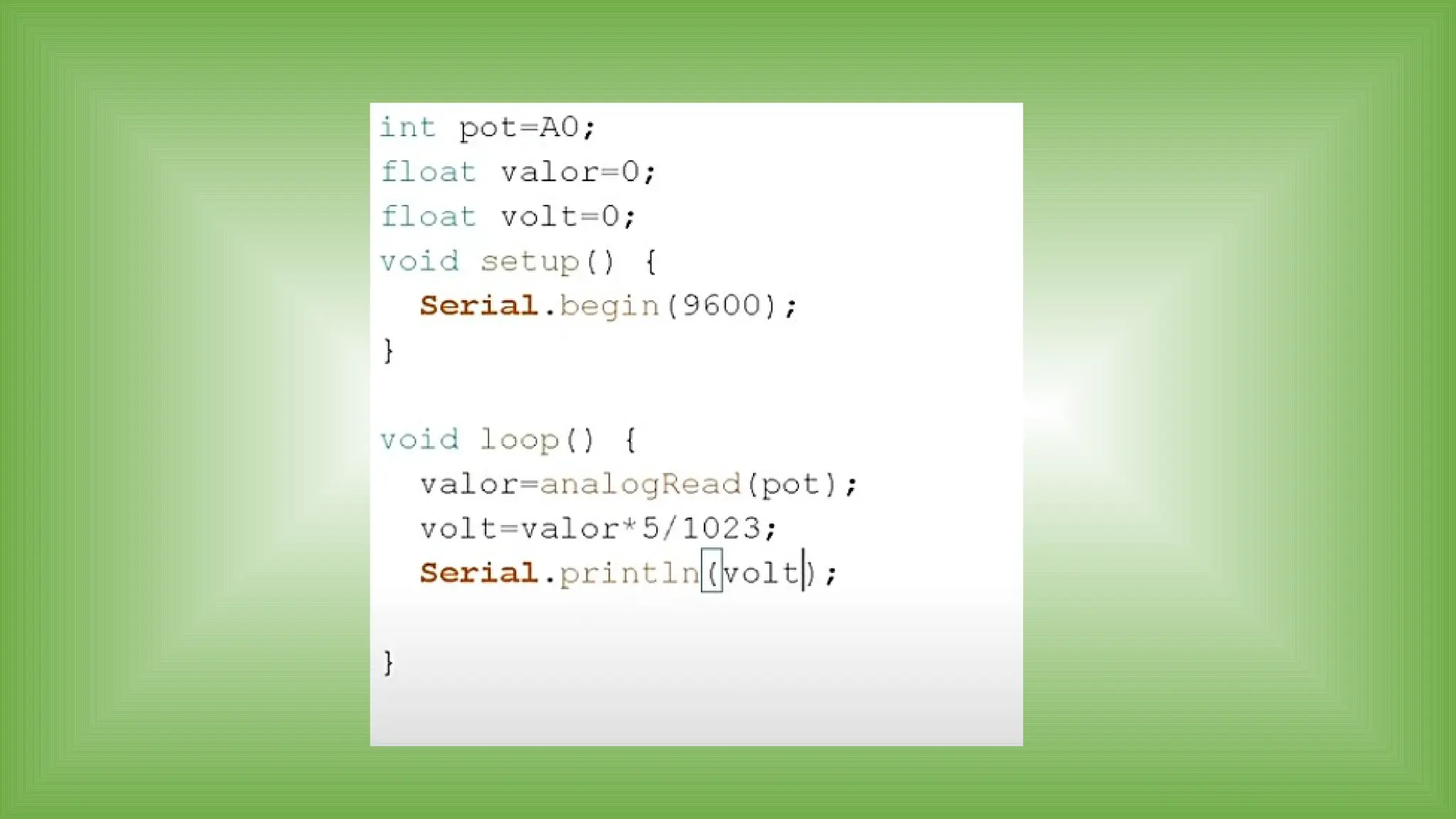
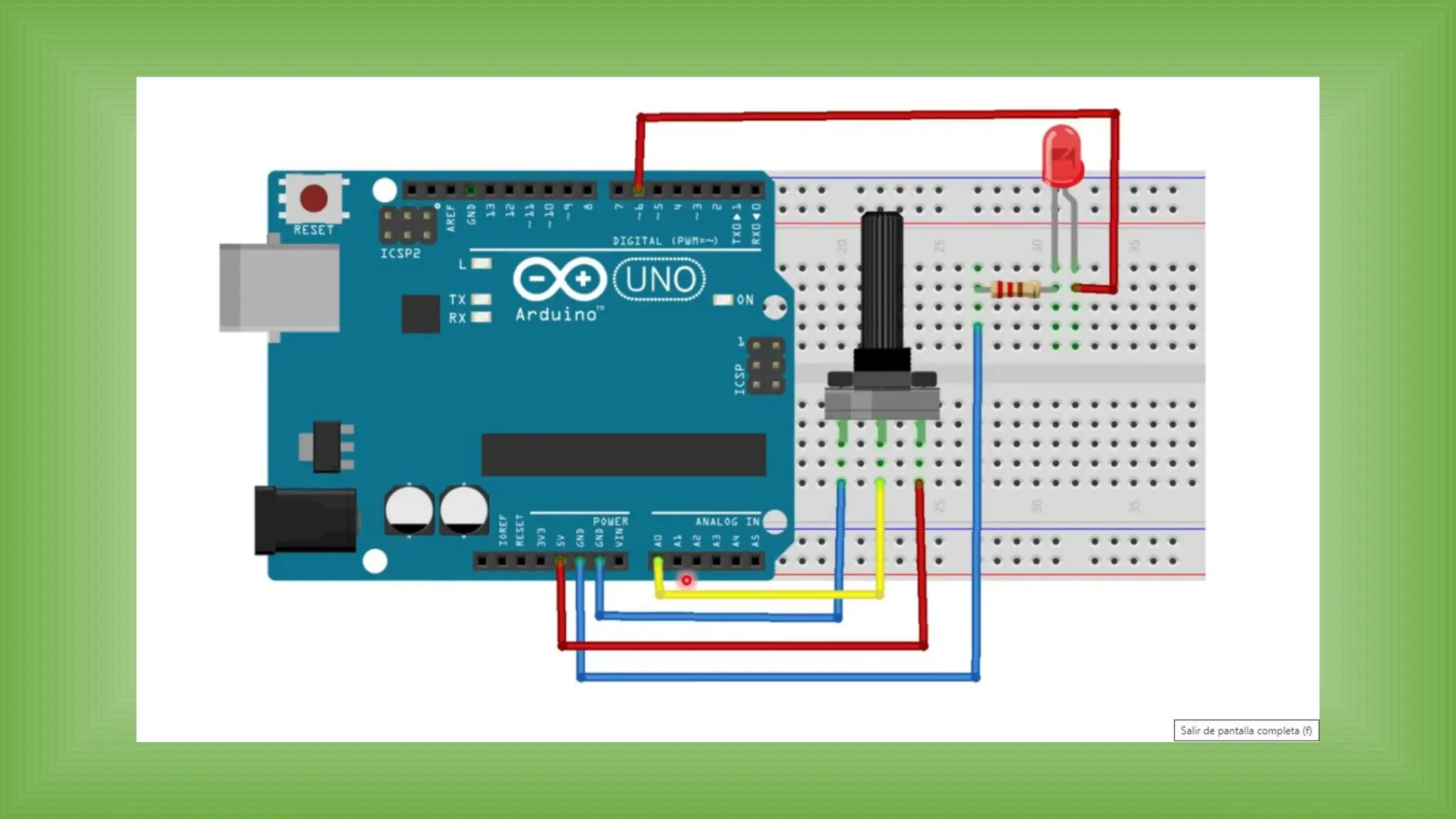
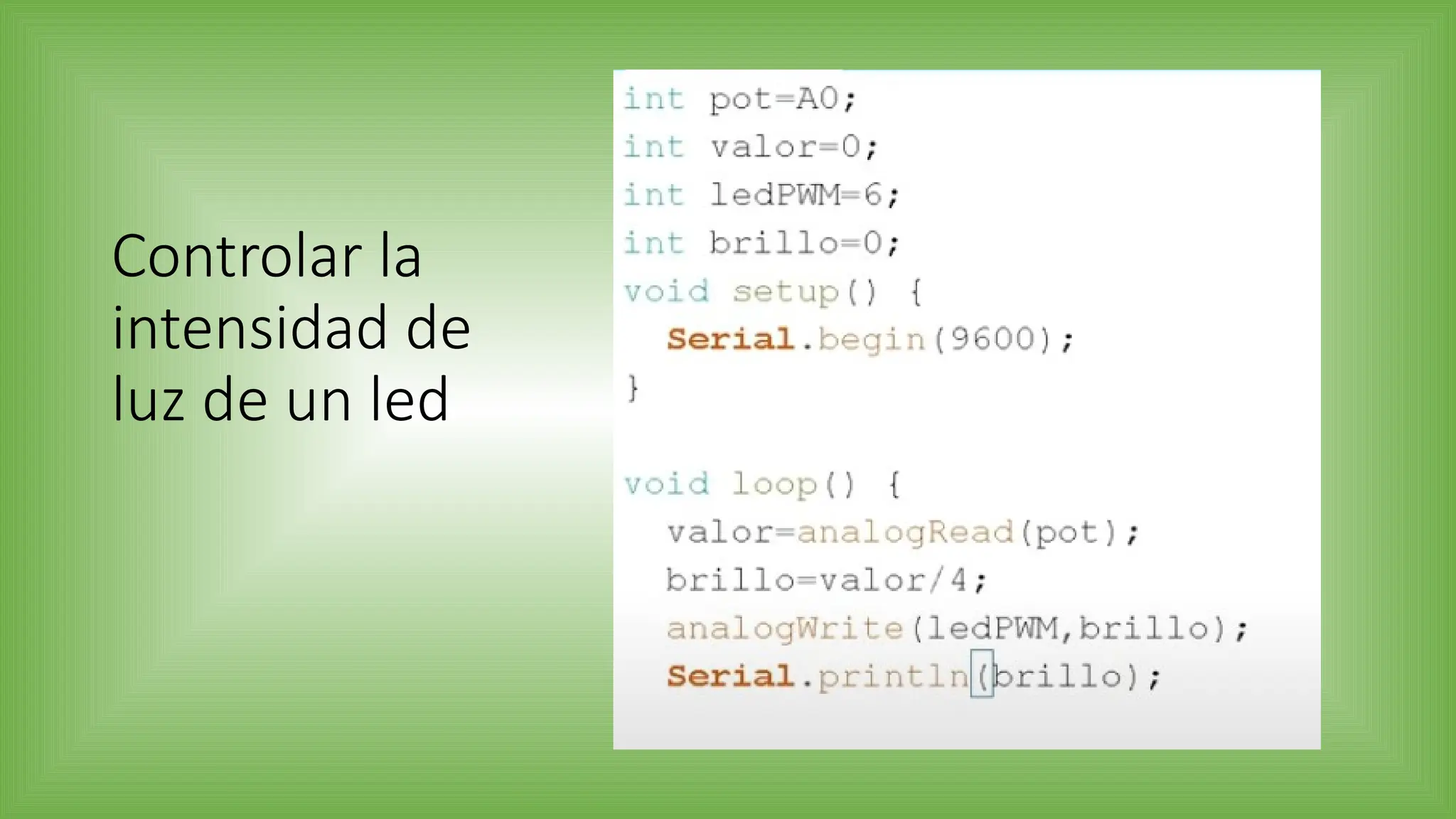
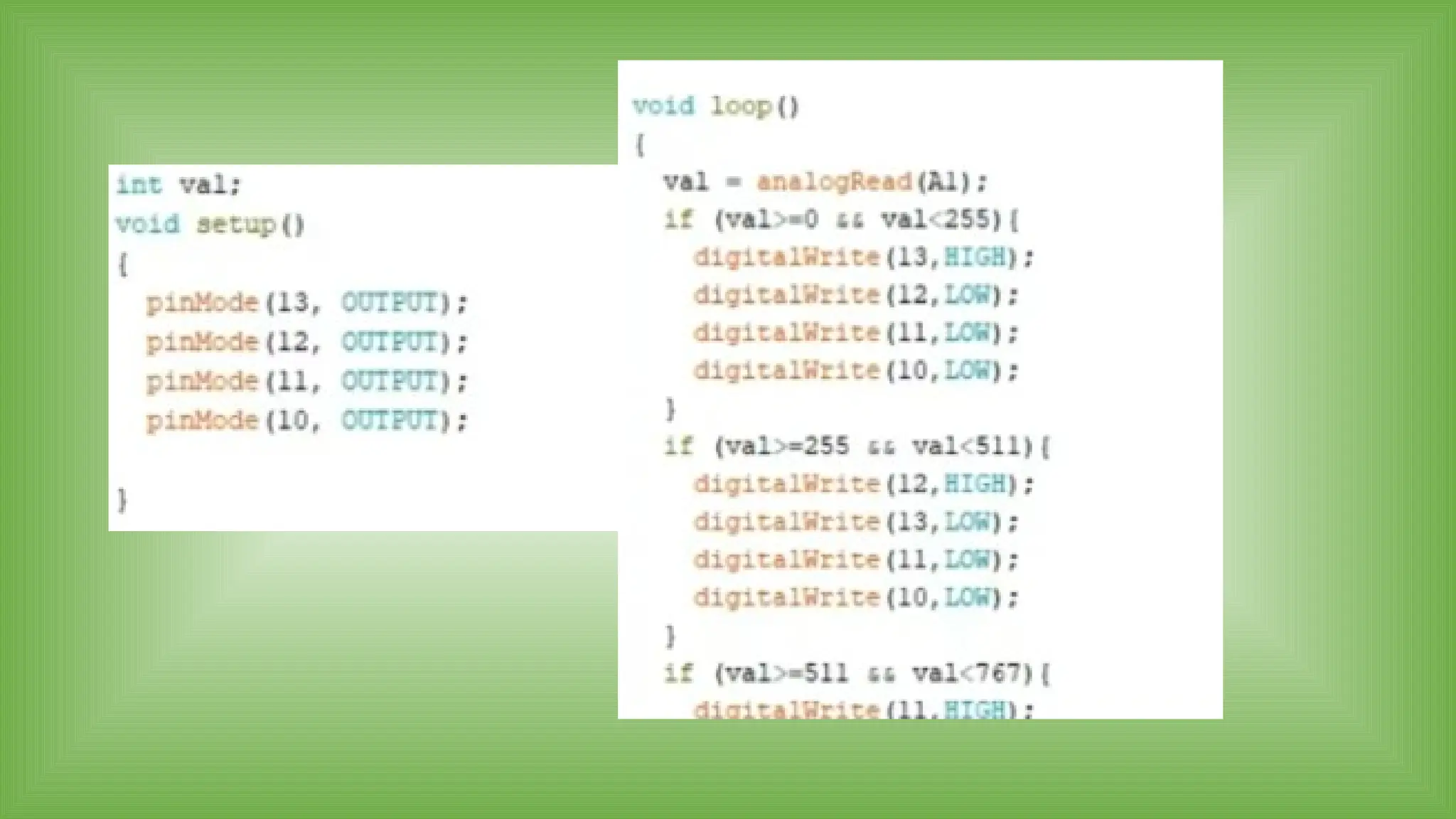
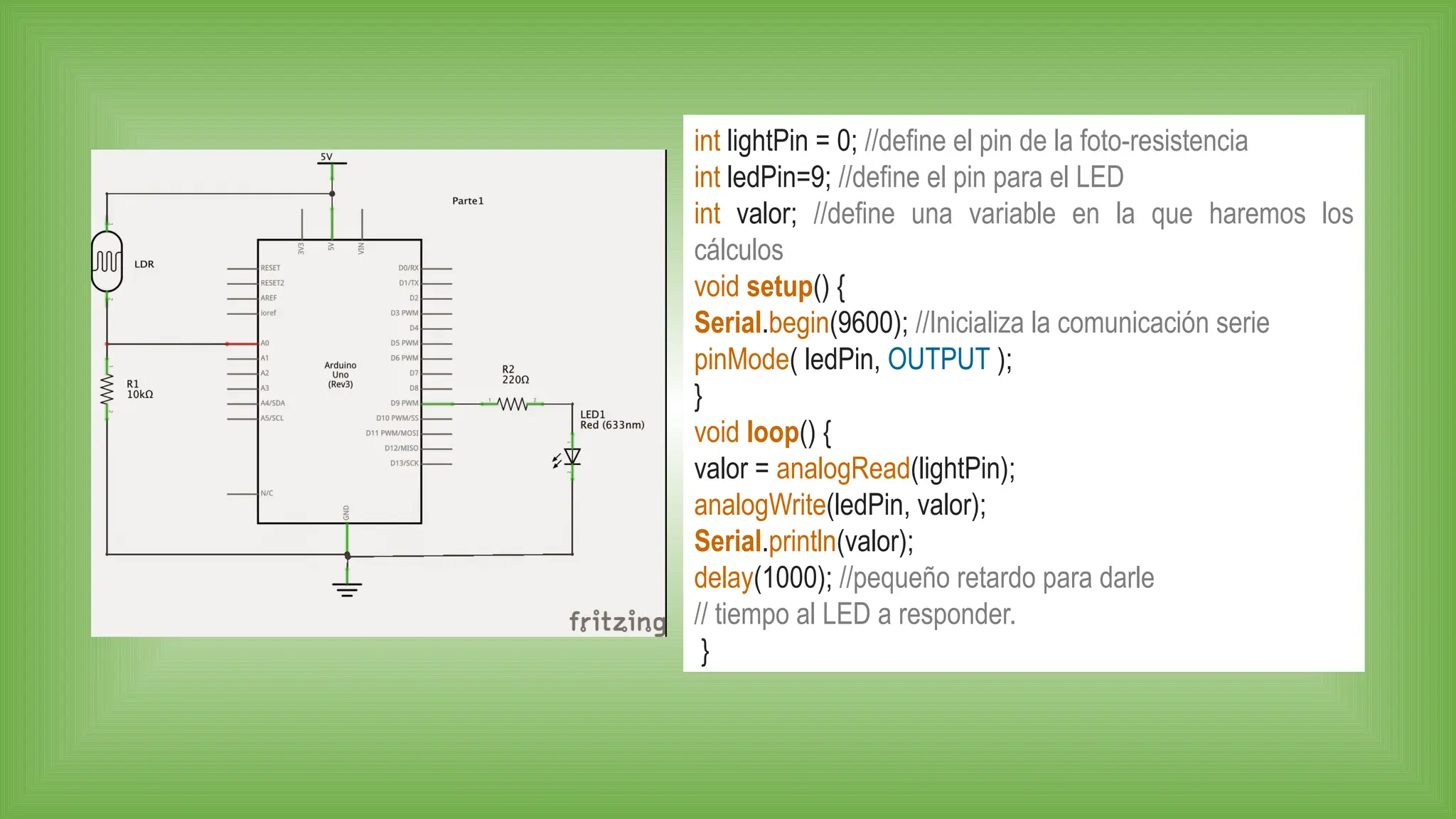
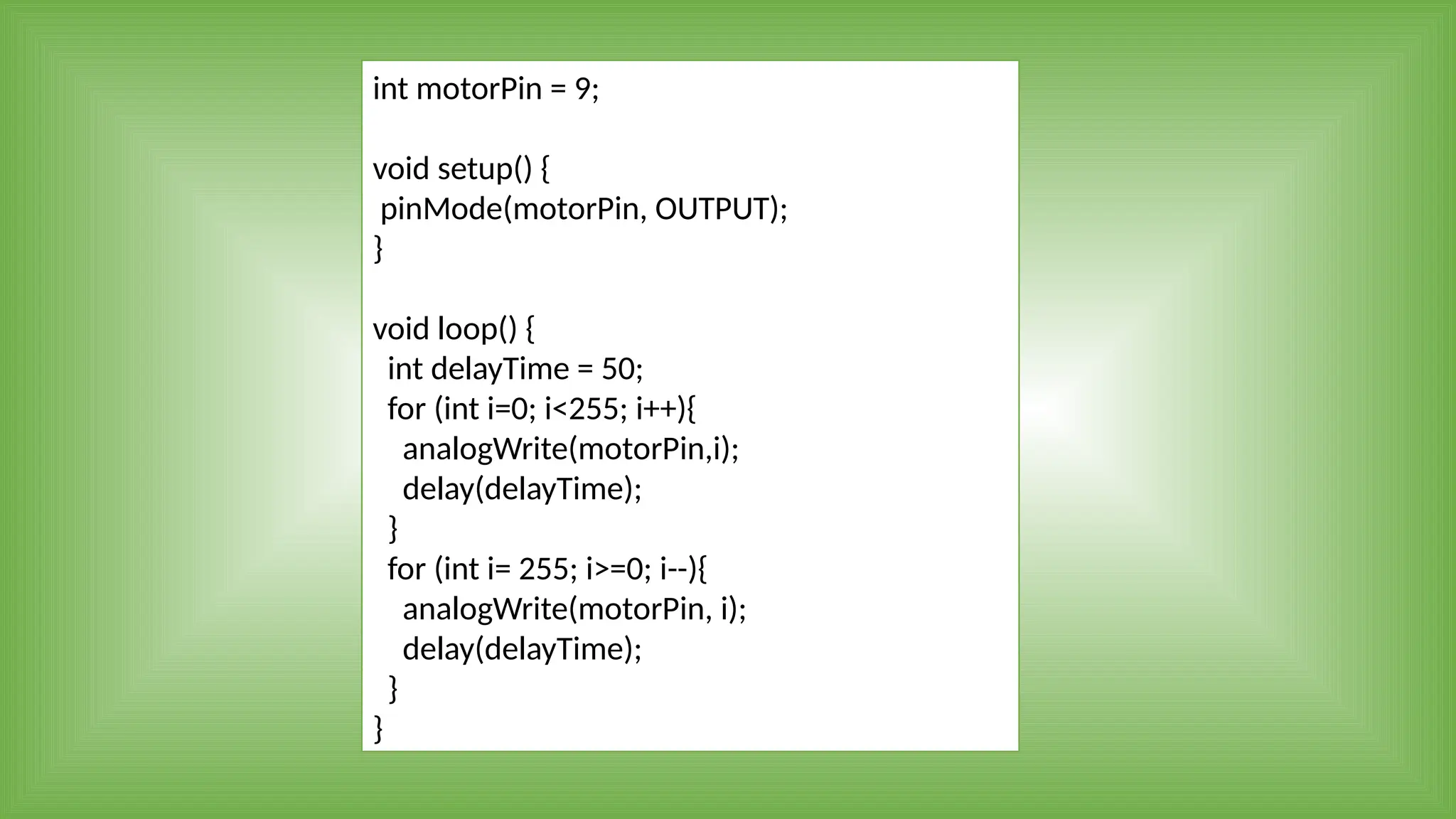
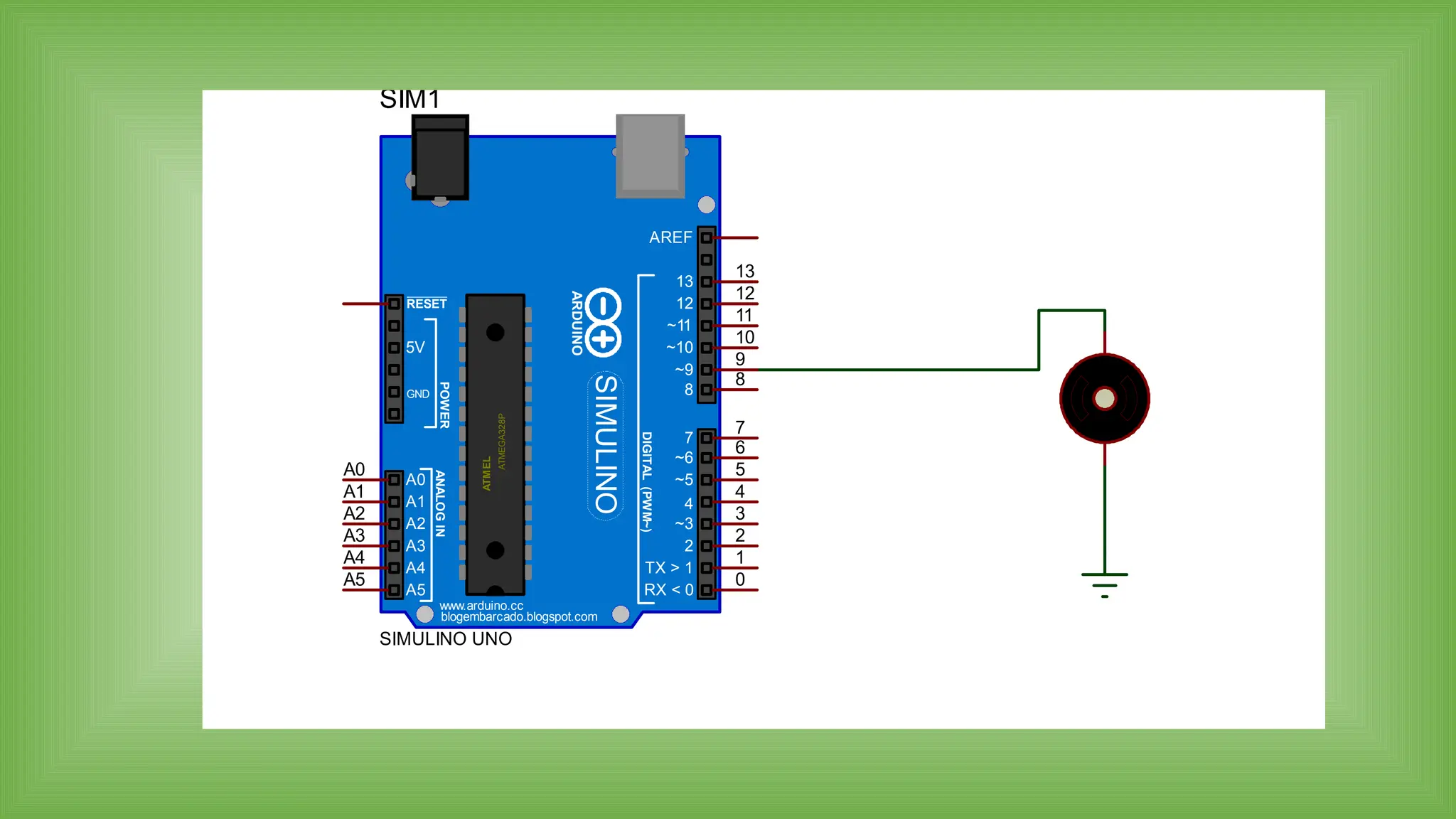
Arduino es una placa electrónica con un microcontrolador Atmel que permite la programación para controlar dispositivos a través de 14 pines digitales y 6 pines analógicos. Los pines digitales pueden configurarse como entrada o salida y las entradas analógicas permiten obtener datos de sensores en forma de voltajes continuos. La programación se realiza mediante sketches, donde se utilizan funciones para leer y escribir valores en los pines, facilitando el control de dispositivos como motores y LEDs.




















![[Arqui1]practica2 200815555](https://cdn.slidesharecdn.com/ss_thumbnails/arqui1practica2200815555-140918220820-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















