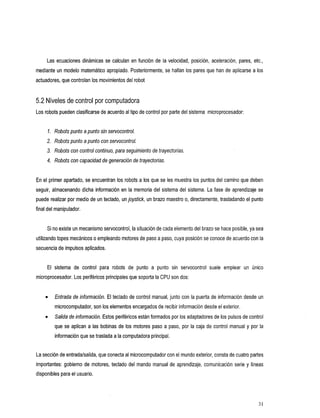
Este documento presenta el reporte final de un proyecto para diseñar y construir un brazo mecánico controlado por una computadora personal a través de motores de paso. El objetivo era conocer las ventajas y desventajas del uso de la computadora y los motores de paso en la implementación de un brazo robótico. El reporte incluye la introducción al campo de la robótica, las partes de un robot, los motores de paso y el diseño del circuito de interfaz entre la computadora y los motores para controlar el brazo mecánico a través
























![int Eyl,Ey2,Ey3,Ey4,Ey5,Ey6,Ey7,Ey8,Ey9,Eancholx,EanchoIy,Eancho2x,Eancho2y;
double fil,fi2,fi3,P,R,limiteinc,limiteinc2,limiteinc3;
int L,D,B,d,e,f,g,h,i;
int MxO,MyO,Mx1,Myl,Mx2,My2,Mx3,My3,Mx4,My4,Mx5,My5,Mx6,My6,Mx7,My7,Mx8,My8,Mx9,My9;
int auxXO,auxYO,auxXl,auxYl,auxX2,auxY2,auxX3,auxY3,auxX4,auxY4,auxX5,auxY5,auxX6,auxY6,auxX7,auxY7,
auxX8, auxY8,auxX9,auxYS;
int desplaza1,desplaza2,desplaza3,desplaza4,desplaza5,pinza;
double senR,cosR,senP,cosP,senfil ,cosfil ,ox,oy,oz,ax,ay,az;
float x3ext,y3ext;
int z3ext,angulomano,angulopinza;
int finalx,finaly,finalz,Efinaly,Mfinalx,Mfinaly;
int realfi3,realP,limiteAng,norosa;
int tope,incremento,compensa,aprobado,incrernentofi2,CualSeMueve,SoltarSiAprisionara;
int lirnrealfi3,limrealP,tolerasigno,tecla;
char buf[4];
void IniciaGrafico(void)
{
I* autodetección */
int gdriver = DETECT, gmode, errorcode;
I* inicializa gráficosy variables locales*/
initgraph(&gdriver,
&gmode,"");
/* lee resultado de inicialización*/
errorcode graphresult();
if (errorcode != grOk) I* si ocurrió un error *I
I
printf("Graphics error:%sn",
grapherrorrnsg(errorcode));
printf("Presiona cualquier tecla para salir:");
getch0;
exit(1);/* termina con un código de error *I
1
I
//Calcula la componente X de algun vector.
int CalculaX(int rnagnitud,double angulol ,double angulo2)
{
int x;
39](https://image.slidesharecdn.com/brazomecanico-111003181917-phpapp01/85/Brazo-mecanico-42-320.jpg)


















![//Se calcula el ángulo que forma segmento del brazo con el vector anterior.
el
if (c==O) {Arad=l.5708;}
else
{Arad=acos((-(pow(B,2))+pow(D,2)+potc)/(2*D*c));}
A=(Arad*180)/3.1416;
//Se calcula el ángulo que forma el segmento del antebrazo con el vector.
angB=(asin((D*sin(Arad))/B)*l80)/3.1416;
//Se calcula el ángulo que forma el brazo el antebrazo.
con
C=180-A-angB;
//Se calculan los desplazamientos que deben tener los ángulos de las articulaciones para alcanzar el nuevo punto final.
finl=filaux;
fin2=A+anguloxyz;
fin3=C-180;
fin4=Paux-((A+anguloxyz)+(C-l80));
desplazal=finl-fil;
desplaza2=fin2-fi2;
desplaza3=fin3-(fi3-fi2);
desplaza4=fin4-(P-fi3);
desplaza5=angulopinza-R;
pinza=modopinza;
1
//Función que verifica si el carácter leído de la variable se trata de un número, regresa un ceroes algún otro carácter.
si
int DIGITO(char simbolo2)
I
char digitos[l I ] "1234567890";
in t ap2;
int result2;
result2=0;
for (ap2=0; ap2<=9; ap2++)
{ if (digitos[ap2]!=simbolo2)
{result2=0;}
else
{result2=1;
58](https://image.slidesharecdn.com/brazomecanico-111003181917-phpapp01/85/Brazo-mecanico-61-320.jpg)
![ap2=1O;
1
1
return(result2);
1
//Función que valida la cadena que el usuario introdujo desde el teclado, regresa un uno la cadena es una serie de
si
//números y un cero en caso contrario.
int EsNumero(char buf[4])
{
int resultl=O;
int apl;
for (apl =O; apl cstrlen(buf); apl++)
{ if ((apl==O)&&(buf[apl]=='-')&&(tolerasigno))//Verifica si es un
{resultl = I ;} //numero
negativo.
else if (!DIGITO(buf[apl]))
{resultl =O;
break;}
else
{resultl=l;}
1
return(result1);
1
//Este procedimiento despliega mensajes en pantalla para pedir al usuario que ingrese nuevos valores de las
los
//coordenadas del punto final, y después llama al procedimiento "CalculaAngulos".
void PideCoordenadas(void)
I
clrscr();
tolerasigno=l;
do{
strset(buf,'O');
gotoxy(30,10);
printf("coordenada x :
gotoxy(45,10);
scanf("%s",buf);}
while (!EsNumero(buf));
59](https://image.slidesharecdn.com/brazomecanico-111003181917-phpapp01/85/Brazo-mecanico-62-320.jpg)