Descargado 30 veces
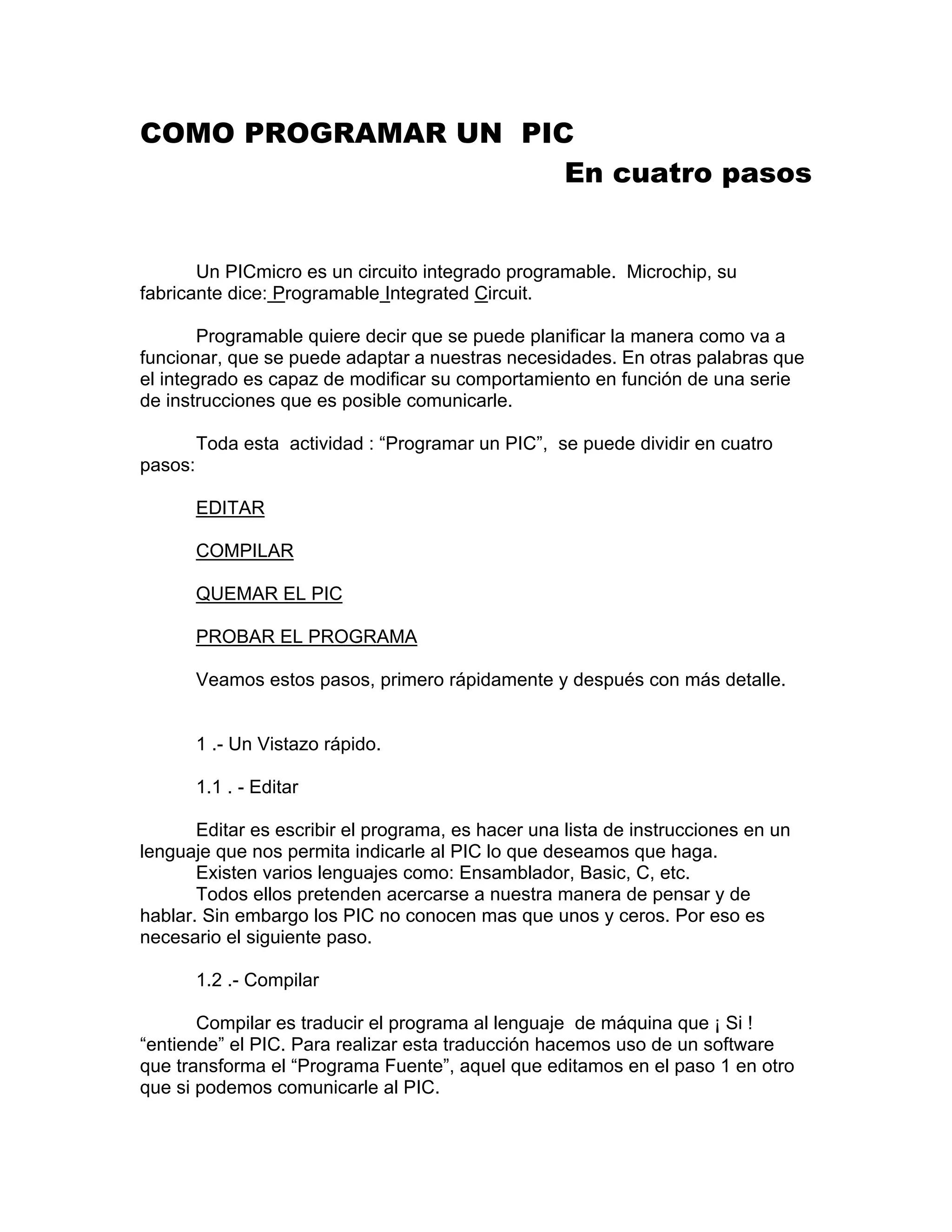
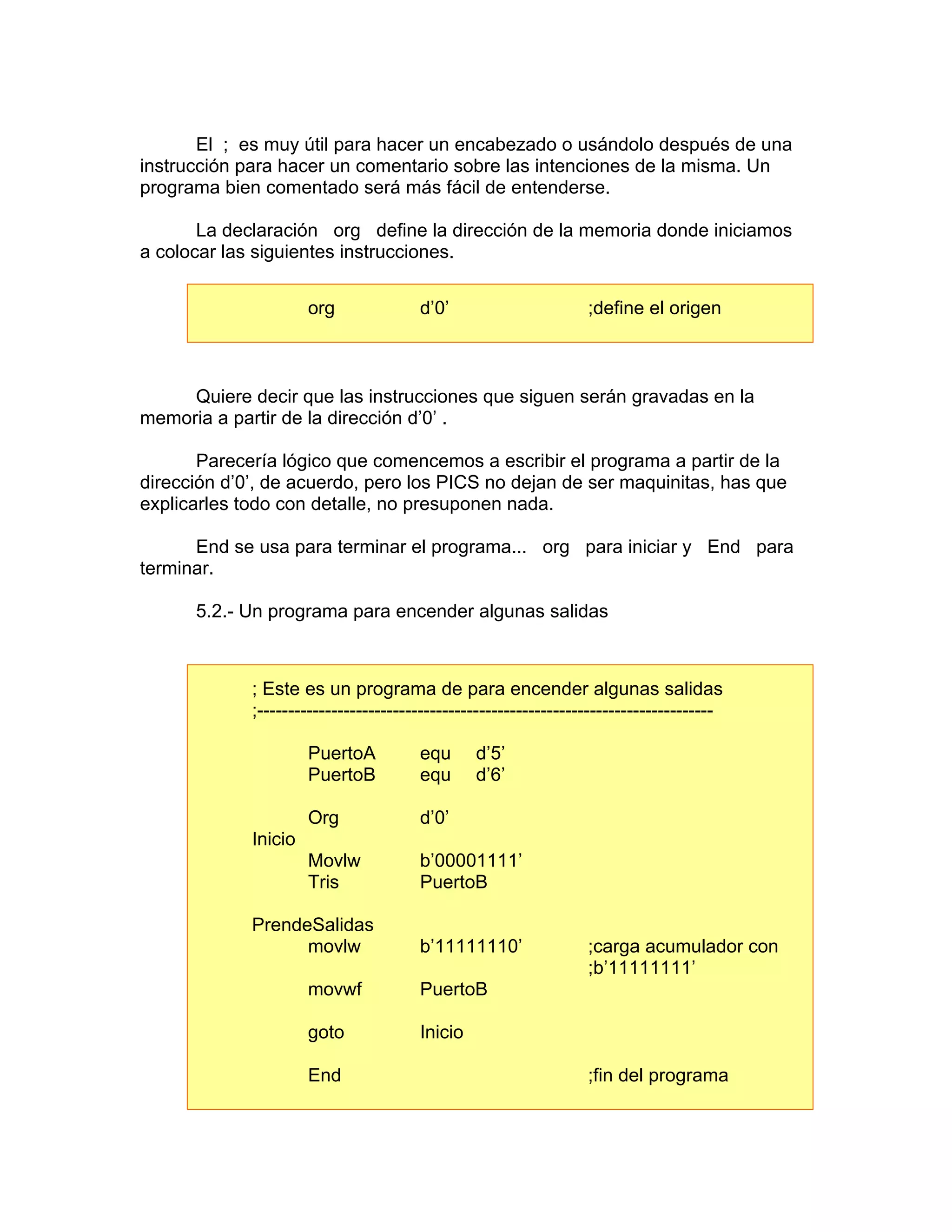
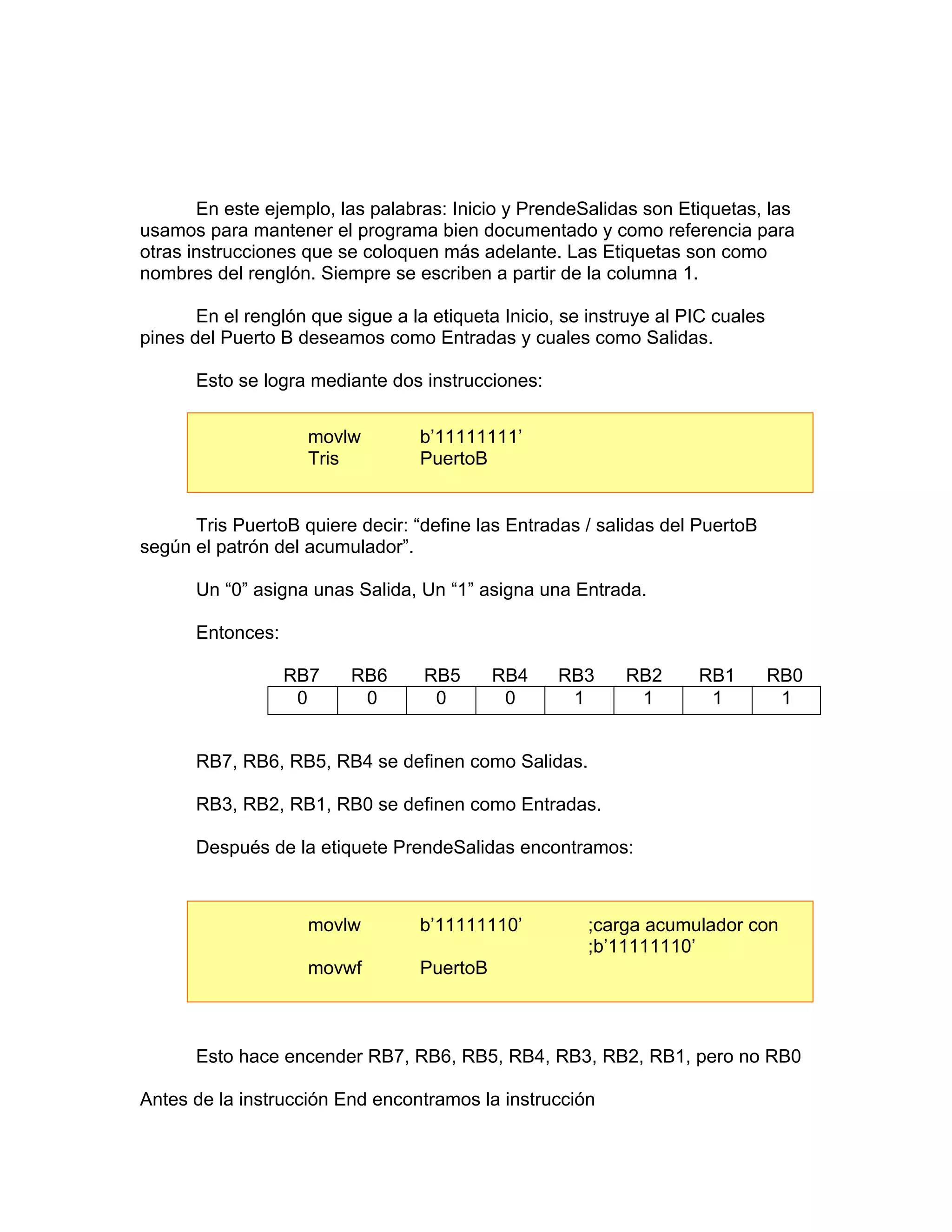


Este documento explica los cuatro pasos para programar un PIC: 1) editar el código fuente, 2) compilar el código, 3) grabar el programa compilado en el PIC, y 4) probar el programa. Se detallan cada uno de los pasos y se proporciona información sobre el PIC16F84, incluyendo su memoria y puertos.












































