Descargado 23 veces



![p18f45k20.h , osea de C:MCC18h. Y por tanto , tenemos la instrucción de esta librería utilizada en
el programa con la línea Delay1KTCYx (50) ;
Esta función crea un retardo de 1000 instrucciones de ciclo multiplicado por lo que hay entre
paréntesis y nos daría 1000*50= 50.000 ciclos y como en nuestro microcontrolador el ciclo es ¼ de
la señal de reloj, pues en este caso ( sin oscilador es 1MHzz) será 1mHz/4 = 250KHzz lo que nos da
unos 200 ms que mas que suficiente lento para que nuestro ojo lo vea parpadear.
LESSON 3 ROTACION LED
Este programa realiza el desplazamiento de leds encendiendo uno detrás de otro. El archivo
03 Rotate LED.c declara una variable como global llamada LED_Number y así se asigna:
/** V A R I A B L E S *************************************************/
#pragma udata // asigna variables estáticas no inicializadas
unsigned char LED_Number; // 8bit variable
La directiva #pragma udata sirve para decir al compilador que las variables de datos que a
continuación siguen, se deben de meter en los registros del PIC( ojo es en el área de registros).
Hay dos directiva que se pueden usar con #pragma
– udata : Se almacenan datos (registros) sin inicializar en los registros del pic.
– idata: Los datos inicializados se almacenan en el espacio de registros del pic y los datos
de la inicialización son guardados en la memoria de programa y movidos por el código
de inicialización de arranque, antes de que empiece el programa.
La declaración de datos puede pertenecer a una sección con un nombre. Dicho nombre de
sección puede asociarse a un script SECTION para colocarlo en un área particular de memoria.
La directiva #pragma udata se debe de especificar la dirección de comienzo de los datos a
almacenar en el pic y a partir de estas, serán secuenciales una detrás de otra. Supongamos que
queremos colocar la variable LED NUMBER al inicio del banco de registros número 3, y por tanto
se debería de programar así:
#pragma udata mysection = 0x300 unsigned char
LED_Number; // 8bit variable unsigned int
AnotherVariable;
Aquí mysection es una sección con dicho nombre y que empieza en la dirección 0x300 y los
datos que va a recibir serán del tipo unsigned char. LED Number será una variable y separada por ;
las siguientes variables. Hay que decir que no es lo mismo guardar datos de 8 bits que de 16 como
por ejemplo el tipo de dato integer que es de 16 bits lo que ocupará dos posiciones en la sección.
Hasta ahora hemos visto como se insertan datos en el área de registros, y a continuación
veremos como metemos datos en el área de programa.
/** D E C L A R A T I O N S *******************************************/
// declare constant data in program memory starting at address 0x180
#pragma romdata Lesson3_Table = 0x180
const rom unsigned char LED_LookupTable[8] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40,
0x80};
#pragma code // declare executable instructions
void main (void)](https://image.slidesharecdn.com/pikit3-partei-120516003327-phpapp01/85/Pikit3-parte-i-6-320.jpg)

![/** D E C L A R A T I O N S *******************************************/
// declare constant data in program memory starting at address 0x180
#pragma romdata Lesson3_Table = 0x180
const rom unsigned char LED_LookupTable[8] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40,
0x80};
#pragma code // declare executable instructions
void main (void)
{
LED_Number = 0; // initialize
TRISD = 0b00000000; // PORTD bits 7:0 are all outputs (0)
while (1)
{
// use lookup table to output one LED on based on LED_Number value
LATD = LED_LookupTable[LED_Number];
LED_Number++; // rotate display by 1
if (LED_Number == 8)
LED_Number = 0; // go back to LED 0.
Delay1KTCYx(50); // Delay 50 x 1000 = 50,000 cycles; 200ms @ 1MHz
}
}
Inicialización de variables y I/O puertos.
Se configura trisd para que todas las patitas del portd sean salidas y la variable global
LED_Number es el numero de led a encender.
Primero se inicializa con el valor 0 en LED_Number y después se usa como array en el
índice y el array devuelve el valor por la posición que le indica LED_Number. Como el valor inicial
de LED_Number es cero, el índice del array es cero también, por lo que su valor a devolver es el
primer dato del array, osea 0x01. Este valor es almacenado en el latch del puerto D quedando en
primera instancia la formula con el siguiente valor:
LATD =LED_lookupTable[LED_Number] siendo su valor LATD = 0x01
Seguimos y vemos que ahora se incrementa LED_Number por lo que el próximo valor a
mostrar será el siguiente (0x02). Se compara el valor del índice( LED_Number) por si su valor es 8,
que en caso de afirmativo volvería a poner a LED_Number a 0 ( reset) o en caso contrario ejecuta un
retardo de 200 ms y vuelve de nuevo al array indefinidamente haciendo girar los leds.
Ejercicio 4 Rota switch
En este ejercicio se utiliza un switch para hacer rotar los leds del ejercicio anterior.
Se utiliza la directiva #define y se asume que el lector ya sabe o por lo menos está familiarizado
con el lenguaje C.
#define Pin_Switch PORTBbits.RB0
Esto hará que cada vez que pongamos Pin_Switch el compilador lo sustituye por PORTBbits.RB0.
Pero para que el compilador entienda la directiva #define se debe incluir el archivo cabecera “04
Switch Input.h”, veamos como:
#include “04 Switch Input.h”](https://image.slidesharecdn.com/pikit3-partei-120516003327-phpapp01/85/Pikit3-parte-i-8-320.jpg)










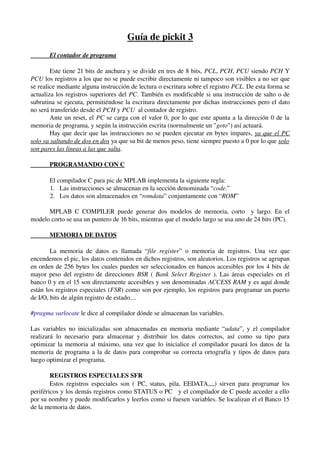
Este documento proporciona una guía sobre el uso del PICkit 3 para programar microcontroladores PIC. Explica cómo funciona el contador de programa del PIC y cómo se almacenan las instrucciones y datos en la memoria. También describe cómo crear y compilar proyectos en C usando MPLAB y el PICkit 3 para encender un LED conectado a un puerto del microcontrolador.





























![What's it like to work for an App developer [flash talk]](https://cdn.slidesharecdn.com/ss_thumbnails/bcspresentationv2-1-130322064353-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



































