Descargar para leer sin conexión


![3
• Masa en reposo:
m2
0c2
= pa
pb
ηab =
E2
c2
− p2
x − p2
y − p2
z
• Invariante electromagnético:
FabFab
= 2
(
B2
−
E2
c2
)
GcdFcd
= ϵabcdFab
Fcd
=
2
c
(
⃗B · ⃗E
)
3 Cuadrivectores en teoría general
de la relatividad
En la teoría general de la relatividad el espacio-tiempo
(M, g) se representa por una variedad pseudoriemannia-
na definida por un tensor métrico que varía de un pun-
to a otro del espacio. Además debido a la curvatura del
espacio-tiempo los espacios tangentes de dos puntos di-
ferentes del espacio-tiempo tienen en general orientacio-
nes diferentes. Eso impide, como pasaba con el espacio
de Minkowski de la relatividad especial, identificar di-
rectamente los puntos de la variedad M con el espacio
vectorial tangente de dicha variedad. Un campo vectorial
sobre un espacio-tiempo curvo es una aplicación que a ca-
da punto de la variedad le asigna un elemento del fibrado
tangente de la variedad:
U : M → TM, U =
Uα
(x)eα(x), x ∈ M
Por eso todos los cuadrivectores y cuadritensores en teo-
ría de la relatividad general en cada punto son elementos
del espacio tangente de ese punto. Eso complica el apa-
rato matemático porque cuando se comparan magnitudes
tensoriales o vectoriales en diferentes puntos del espacio,
los espacios vectoriales tangentes sobre los que están de-
finidos no tienen la misma orientación. Para poder hacer
comparciones entre diferentes puntos, calcular derivadas
de magnitudes físicas, etc, se requiere una conexión ma-
temática que permita definir una derivada covariante, de
tal manera que las magnitudes físicas satisfacen ecuacio-
nes que cumplen con el principio de covariancia.
La cuadrivelocidad y el cuadrimomento en relatividad
general se definen como:
V α
= dxα
dτ , Pα
= mV α
Siendo τ el tiempo propio de la partícula, que en gene-
ral dependerá de la trayectoria seguida por la partícula
(x0
(λ),x1
(λ),x2
(λ),x3
(λ)) mediante la relación:
τf = 1
c
∫ λf
0
−
[
g00
dx0
dλ + g0α
√
g00
dxα
dλ
]
dλ
Por otra parte la cuadriaceleración y la cuadrifuerza
requieren el uso de la derivada covariante y por tanto de
la conexión matemática asociada a la métrica y expresada
mediante los símbolos de Christoffel:
Aα
=
DV α
Dτ
= V β
∇βV α
=
(
dV α
dxβ
+ Γα
µβV µ
)
V β
=
dV α
dτ
+
fα
= mAα
4 Véase también
• Anexo:Glosario de relatividad](https://image.slidesharecdn.com/cuadrivector-171207150802/85/Cuadrivector-3-320.jpg)


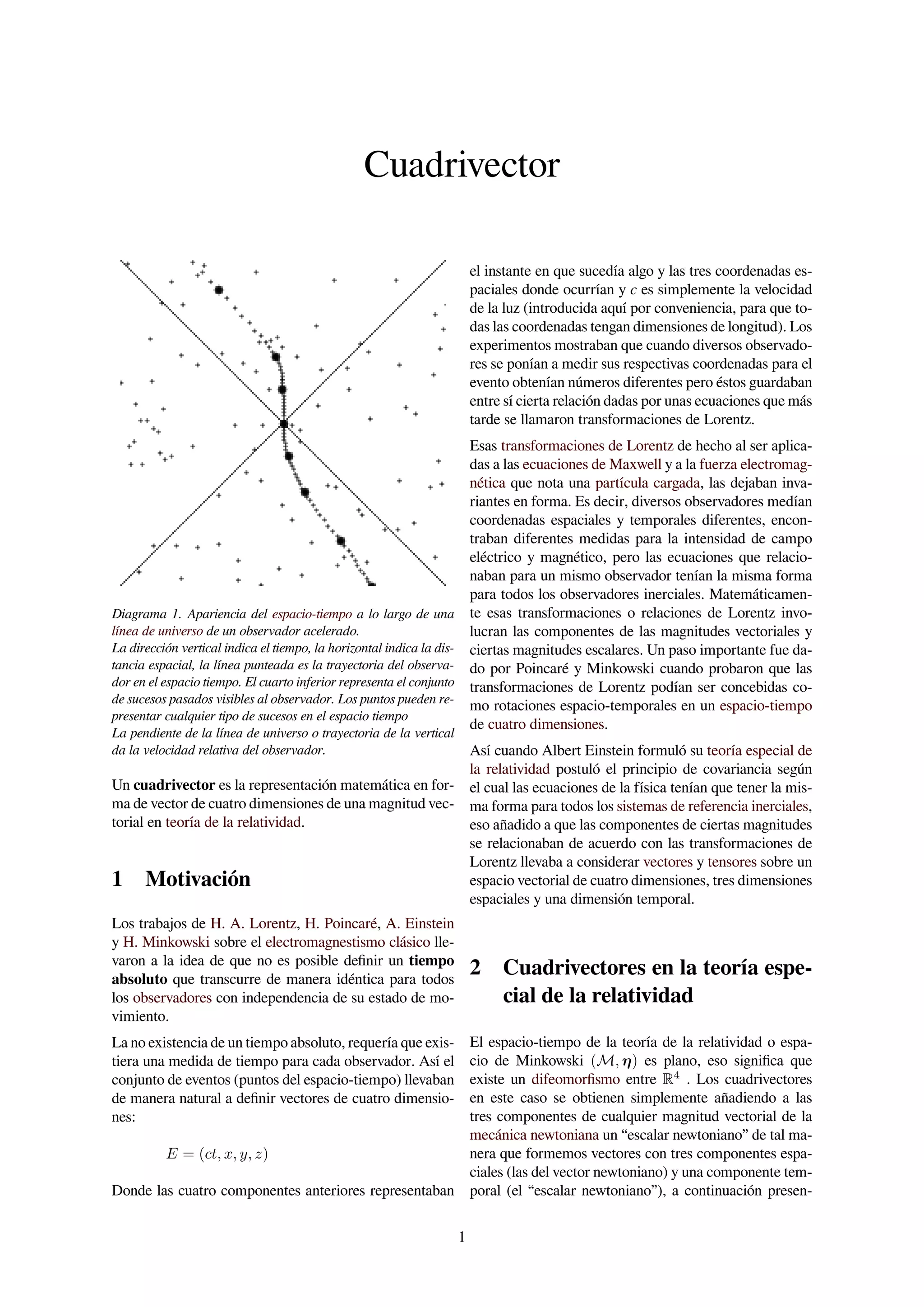
Este documento describe los cuadrivectores, que son representaciones matemáticas de vectores en cuatro dimensiones en la teoría de la relatividad. Explica que surgen de la idea de que no existe un tiempo absoluto, sino que cada observador tiene su propio tiempo, requiriendo vectores de cuatro dimensiones para describir eventos en el espacio-tiempo. Define varios cuadrivectores clave como la cuadrivelocidad, cuadrimomento, cuadriaceleración y cuadrifuerza. También cubre cuadritensores como el momento angular y campo elect