Descargar para leer sin conexión
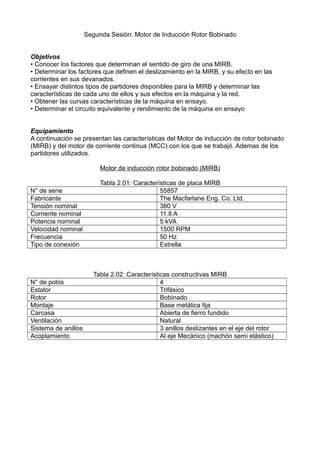


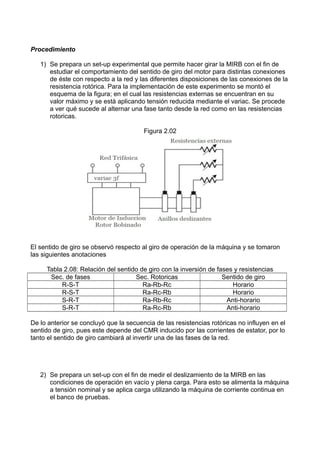

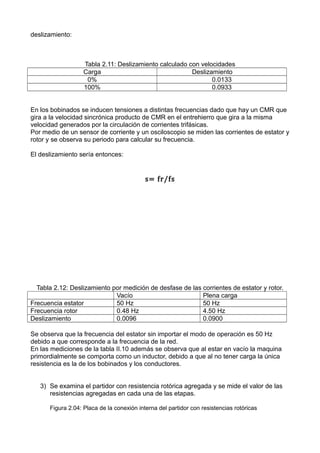








Este documento presenta los objetivos y procedimientos para realizar una sesión experimental sobre un motor de inducción de rotor bobinado (MIRB). Los objetivos incluyen determinar factores que afectan el sentido de giro, medir el deslizamiento bajo diferentes cargas, y obtener las curvas características de la máquina. Se describen las características técnicas del MIRB y equipos de soporte. Los procedimientos incluyen ensayos para medir el sentido de giro, deslizamiento, resistencias del partidor, y obtener curvas















































