Descargado 1054 veces



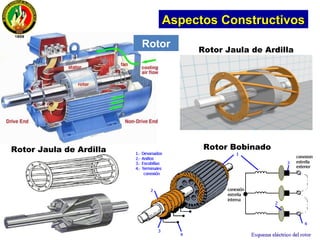














































































El documento describe las máquinas eléctricas asíncronas, destacando su construcción simple y robusta, donde el rotor no recibe corriente directa, sino que es inducido por el estator. Se explican sus principios de funcionamiento, clasificación, y cómo se logra controlar su velocidad mediante variadores de frecuencia. También se detalla el circuito equivalente del motor asíncrono y la influencia de las condiciones de carga en su rendimiento.









































![Motor trifásico asíncrono [colegio dean funes c.d.f.]](https://cdn.slidesharecdn.com/ss_thumbnails/motortrifsicoasncronocolegiodeanfunesc-d-f-120601175047-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

























