1) Los motores de corriente alterna trifásicos están constituidos por un estator fijo con devanados trifásicos y un rotor móvil con barras de cobre o devanados.
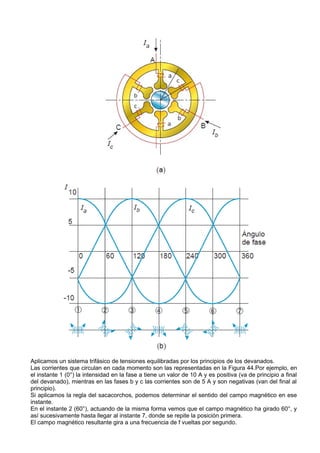
2) El principio de funcionamiento se basa en el campo magnético giratorio creado por la corriente trifásica en el estator, el cual induce corrientes en el rotor y genera un par motor.
3) Las características principales de los motores incluyen las curvas de velocidad, consumo, factor de potencia, rendimiento y par mecán

















































![Motor trifásico asíncrono [colegio dean funes c.d.f.]](https://cdn.slidesharecdn.com/ss_thumbnails/motortrifsicoasncronocolegiodeanfunesc-d-f-120601175047-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




















































