
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a motor-de-fondo.pdf
Similar a motor-de-fondo.pdf (20)
Último
Último (20)
motor-de-fondo.pdf
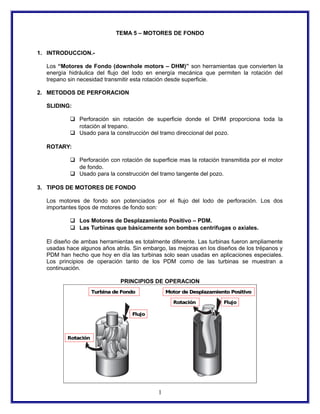
- 1. TEMA 5 – MOTORES DE FONDO 1. INTRODUCCION.- Los “Motores de Fondo (downhole motors – DHM)” son herramientas que convierten la energía hidráulica del flujo del lodo en energía mecánica que permiten la rotación del trepano sin necesidad transmitir esta rotación desde superficie. 2. METODOS DE PERFORACION SLIDING: Perforación sin rotación de superficie donde el DHM proporciona toda la rotación al trepano. Usado para la construcción del tramo direccional del pozo. ROTARY: Perforación con rotación de superficie mas la rotación transmitida por el motor de fondo. Usado para la construcción del tramo tangente del pozo. 3. TIPOS DE MOTORES DE FONDO Los motores de fondo son potenciados por el flujo del lodo de perforación. Los dos importantes tipos de motores de fondo son: Los Motores de Desplazamiento Positivo – PDM. Las Turbinas que básicamente son bombas centrifugas o axiales. El diseño de ambas herramientas es totalmente diferente. Las turbinas fueron ampliamente usadas hace algunos años atrás. Sin embargo, las mejoras en los diseños de los trépanos y PDM han hecho que hoy en día las turbinas solo sean usadas en aplicaciones especiales. Los principios de operación tanto de los PDM como de las turbinas se muestran a continuación. PRINCIPIOS DE OPERACION 1
- 2. 4. MOTORES DE DESPLAZAMIENTO POSITIVO – PDM’s El primer motor de fondo usado en los campos petroleros fue el Dinadrill (Configuración lobular 1:2). Todos los motores de fondo constan basicamente de los siguientes elementos: Válvula de Descarga (Dump Valve Assembly). Sección de Poder o Potencia (Power Section) Sección Ajustable. Transmisión Sección de Rodamientos (Bearing Section) Sección Giratoria (Drive Shaft Assembly) 4.1.- Válvula de Descarga (Dump Valve Assembly) Permite que el lodo llene el interior de la sarta de perforación durante los viajes y la vacíe mientras realizamos alguna conexión o sacamos la tubería fuera del pozo. Permite el paso de lodo hacia la sección de potencia. La válvula opera a través de un resorte el cual presiona un pistón. El pistón de la válvula es activado por presión diferencial (requiere aprox. 30% del flujo de lodo para forzar el pistón abajo) La válvula evita el influjo del pozo por el interior de la herramienta y permite que en los viajes la tubería salga seca. 2
- 3. 4.2.- Sección de Potencia (Rotor/Estator) Los motores de desplazamiento positivo son una aplicación inversa de las bombas de Moineau. El fluido es bombeado dentro de las cavidades progresivas del motor. La fuerza del fluido causa el movimiento rotatorio de la transmisión dentro del estator. La fuerza rotacional entonces es transmitida a través de la transmisión al trepano 3
- 4. ► El rotor es un vástago de acero con chapa cromada en forma de hélice espiral. ► El estator es una cavidad de acero hueca, donde se aloja una goma compuesta de elastómero, la cual adopta una forma espiral durante su fabricación. ► El rotor es elaborado con un perfil de “lóbulos” coincidente y similar al armado helicoidal del estator. 4
- 5. LOBULOS ► El estator siempre tiene un lóbulo más que el rotor. ► Una vez ensamblado el rotor y el estator forman un sello continúo a lo largo de puntos coincidentes de contacto. ► La rotación y el torque disponible en un PDM dependen del ángulo de contacto y el número de lóbulos en el estator y el rotor. ► Las configuraciones rotor/estator (o relación de lóbulos) actualmente en uso son: ½, ¾, 5/6, 7/8 o 9/10. ► Las configuraciones ½ desarrollan las mayores velocidades y solo están disponibles para trépanos de PDC y diamante natural. ► A mayor cantidad de lóbulos se tiene menores velocidades (<RPM) pero se aumenta el torque desarrollado por el motor (> Torque). 5
- 6. ► La magnitud de la rotación producida es proporcional al volumen de lodos bombeado a través del motor. ► El torque generado a través del PDM es proporcional a la caída de presión a través del motor y es también una función del peso sobre el trepano (WOB). ► Un incremento en el WOB creará mas torque y de la misma manera un incremento en la presión diferencial requerida a través de la sección de poder. Resumen El Torque y las RPM están determinadas por la configuración Rotor/estator. La potencia del motor esta determinada por el número de vueltas del espiral (Etapas) y la relación de lóbulos Rotor/Estator. La interferencia Rotor/Estator puede ser ajustada de acuerdo a las condiciones del pozo. 4.3.- Sección Ajustable (Bent Housing) Permite graduar la curvatura del motor de fondo para cualquier aplicación direccional deseada 6
- 7. 4.4.- Sección de Transmisión Es colocado en la parte baja del rotor, dentro de la sección ajustable (bent housing). Transmite la velocidad rotacional y el torque hacia la sección giratoria y de este al trepano. Una junta universal convierte el movimiento excéntrico del motor en un movimiento concéntrico dentro de la sección rotaria. 7
- 8. Algunos modelos de motores PDM son reforzados con goma sobre la junta universal. Compensa la vibración causada por el movimiento excéntrico del rotor y la excentricidad de la sección ajustable (bent housing). 4.5.- Sección de Rodamientos (Bearing Section) y Sección Giratoria (Drive Shaft Section) La sección giratoria es un componente de acero construido rígidamente. Se encuentra apoyado dentro de la sección de rodamientos (bearing section) a través rodamientos que soportan esfuerzos radiales y axiales. La sección de rodamientos (bearing section) transmite la potencia rotacional y el esfuerzo de la perforación al trépano de perforación. 4.6.- Sección de rodamientos (Bearing Section) Permite la rotación de la barrena sin necesidad de rotación de la sarta. Posee bolas que giran en pistas de carburo de tungsteno. Son sellados o lubricados por lodo. Sobre la sección de baleros esta la Camisa Estabilizadora que es intercambiable de acuerdo a la aplicación direccional requerida. Soportan el peso axial cuando se perfora. 8
- 9. 5. TURBINAS DE PERFORACION 5.1.- Introducción ► Turbina de Perforación: La turbina convierte la energía hidráulica proveniente del lodo en energía mecánica rotativa para se entregada a la mecha de perforación. ► La velocidad de rotación en fondo está entre las 600 rpm y 1500 rpm. ► La rotación del trépano es independiente de la rotación de tubería. Las turbinas de perforación básicamente constan de dos partes: Sección de Poder o Potencia. Sección de Rodamientos. PDM 1:2 PDM Multilóbulo Altas Velocidades Bajas velocidades Bajos Torques Altos torques Bajos Caudales de Flujo Altos caudales de Flujo Bajo WOB Altos WOB Bajas presiones en el motor Bajas presiones en el trépano Altas presiones en el motor Altas presiones en el trépano Necesitan trépanos de alta velocidad Relativamente fácil de orientar Mas difícil de orientar Usado con junta ajustable Usado con junta ajustable o arreglo dirigible 9
- 10. 5.2.- Sección de Potencia ► Esta sección provee la potencia a la turbina. ► Dependiendo del requerimiento podemos tener configuraciones de 1 , 2 hasta 3 secciones de potencia por turbina. ► Se pueden contar con 70 a 150 piezas de alabes (Rotor/Estator) por sección de potencia. 10
- 11. 5.3.- Sección de Rodamientos: ► Soporta la fuerza axiale que se transmite a través del eje, desde la sección de potencia. 11
- 12. 5.4.- Se clasifica según: Tamaño de Turbina. El numero de secciones de potencia El perfil del Alabe Tamaño de la Turbina Numero de Secciones de la Turbina T1 - Turbina con una sección de Potencia. T2 - Turbina con dos secciones de Potencia. T3 - Turbina con tres secciones de Potencia. T1XL- Turbina con una sección Potencia extendida. 12
- 13. El Perfil del Alabe o Aleta Tipos de Aletas o Alabes: Mk1, Mk2 o Mk3, los cuales son seleccionados para optimizar una aplicación particular. 5.5.- Características de las Turbinas: Capaz de generar altas potencias. La herramienta presenta un perfecto balance con los esfuerzos radiales La potencia a generar no depende de elastómeros, o elementos de goma (componentes metálicos). Las turbinas de perforación tienen una excelente resistencia al calor. La velocidad y le torque son manipulables desde Superficie. 5.6.- Desventajas de las Turbinas: Las turbinas no tiene aplicación con trépanos triconicos. Genera alta potencia a expensa del flujo de lodo, lo que da poca aplicación en agujeros profundos. La fabricación y el desarrollo de turbinas que sean comercialmente viable y confiable es difícil y costosa. 5.7.- Ventajas en Pozos Desviados: o Reduce el número de viajes por cambio en el arreglo de fondo de pozo (BHA). o Evita realizar viajes por cambios de junta ajustable (bent sub) o por fallas en la herramienta. o Es capaz de girar progresivamente a la izquierda usando una estabilización convencional de turbina recta. 13
- 14. 6. PDM’s Vs. TURBINAS Respuesta del efecto WOB y BHA Tiene un confiable control de ángulo y azimut. Mantiene uniforme el perfil del pozo, reduciendo de esta manera el incremento del torque. Mantiene los regímenes de penetración (ROP) en modo deslizamiento (sliding) como en modo rotario (rotary). Desventajas comparado con motor de Fondo - PDM 14
- 15. Presenta limitaciones en el bombeo de material para perdidas de circulación (sellantes). El costo diario de la herramienta es mayor que los PDM. Las Altas velocidades son demasiadas para usar trépanos triconicos . Pero hoy en día ya existen turbinas de baja revolución las cuales tiene aplicación con este tipo de trépanos. Tiene muy poca aplicación en las primeras secciones del pozo y en formaciones blandas. Presenta altas caída de presión, lo que es una limitación para los trepanos de poca capacidad de bombas. Tiene un menor torque de salida. 7. METODOS DE DIRECCIONAMIENTO Fuerza Lateral Directa: Push-the-bit Fuerza opuesta a la del trepano, aplicada a las paredes del pozo (a través de aletas – pads) haciendo que el trepano adquiera la dirección hacia donde necesitamos dirigir el pozo. Eje Excéntrico de la Barrena: Point-the-bit El trepano es direccionado hacia la dirección donde necesitamos perforar introduciendo un offset – sistema parecido a perforar con un motor con bend housing. 15
- 16. 1. S. Perforación La evaluación de las propiedades físicas, generalmente la presión, la temperatura y la trayectoria del pozo en el espacio tridimensional, durante la extensión de un pozo. La adquisición de mediciones durante la perforación (MWD) es ahora una práctica estándar en los pozos direccionales marinos, en los que el costo de las herramientas es compensado por el tiempo de equipo de perforación y las consideraciones asociadas con la estabilidad del pozo si se utilizan otras herramientas. Las mediciones se adquieren en el fondo del pozo, se almacenan un cierto tiempo en una memoria de estado sólido y posteriormente se transmiten a la superficie. Los métodos de transmisión de datos varían entre una compañía y otra, pero generalmente consisten en la codificación digital de los datos y su transmisión a la superficie como pulsos de presión en el sistema de lodo. Estas presiones pueden ser ondas senoidales positivas, negativas o continuas. Algunas herramientas MWD poseen la capacidad para almacenar las mediciones para su recuperación posterior con cable o cuando la herramienta se extrae del pozo si el enlace de transmisión de datos falla. Las herramientas MWD que miden los parámetros de una formación (resistividad, porosidad, velocidad sónica, rayos gamma) se conocen como herramientas de adquisición de registros durante la perforación (LWD). Las herramientas LWD utilizan sistemas similares de almacenamiento y transmisión de datos, y algunas poseen más memoria de estado sólido para proporcionar registros de mayor resolución después de extraer la herramienta, que la que es posible con el sistema de transmisión de pulsos a través del lodo con un ancho de banda relativamente bajo. Una plataforma de perforación se utiliza para crear la perforación de pozos o (también llamado un pozo) en la sub-superficie de la tierra, por ejemplo, con el fin de extraer los recursos naturales como el gas o el petróleo. Durante dicha perforación, los datos se adquiere a partir de los sensores de plataforma de perforación para una serie de propósitos, tales como: la toma de apoyo para el seguimiento y gestionar el buen funcionamiento de la perforación; para hacer un registro detallado (o bien log) de las formaciones geológicas penetradas por un pozo; para generar estadísticas de operaciones y parámetros de rendimiento, tales que las mejoras pueden ser identificados, y proporcionar así planificadores con datos históricos operaciones rendimiento precisos con los que realizar análisis de riesgo estadístico para las operaciones así futuras. Los términos de medición durante la perforación (MWD), y el registro durante la perforación (LWD) no se utilizan sistemáticamente en toda la industria. Aunque, estos términos están relacionados, en el contexto de esta sección, el término MWD se refiere a perforación direccional-mediciones, por ejemplo, para el apoyo a las decisiones para el buen funcionamiento de la perforación, mientras LWD se refiere a las medidas relativas a la formación geológica realizada durante la perforación.[1] MWD normalmente se refiere a la medida tomada del pozo (agujero) de inclinación respecto a la vertical, así como la dirección de norte magnético. El uso de la trigonometría básica, un gráfico tridimensional de la trayectoria del pozo puede ser producida. Esencialmente, un operador de MWD mide la trayectoria del agujero, ya que se perfora (por ejemplo, actualizaciones de datos llegan y se procesan cada pocos segundos o más rápido). Esta información se utiliza luego para perforar en una dirección pre-planificado en la formación que contiene el aceite, gas, agua o 16
- 17. condensado. Mediciones adicionales también se pueden tomar de las emisiones de rayos gamma naturales de la roca; esto ayuda en términos generales para determinar qué tipo de formación rocosa está siendo perforado, que a su vez ayuda a confirmar la localización en tiempo real del pozo en relación con la presencia de diferentes tipos de formaciones conocidas (por comparación con los datos sísmicos existentes). Densidad y porosidad, las presiones de rock de líquidos y otras medidas se toman, algunos utilizando fuentes radiactivas, algunos usando el sonido, algunos utilizando la electricidad, etc .; esto, entonces se puede utilizar para calcular cómo libremente aceite y otros fluidos pueden fluir a través de la formación, así como el volumen de hidrocarburos presentes en la roca y, con otros datos, el valor de las reservas enteros de depósito y el depósito. Una herramienta de fondo de pozo MWD también es "de bordes altos" con el conjunto de perforación del fondo del pozo, permitiendo al pozo para ser dirigido en una dirección elegida en el espacio 3D conocida como perforación direccional. Perforadores direccionales confían en recibir datos precisos y de calidad probada del Operador MWD que les permita mantener el pozo de forma segura en la trayectoria prevista. Mediciones topográficas direccionales están presentes tres acelerómetros montados ortogonalmente para medir la inclinación, y tres montados ortogonalmente magnetómetros que miden la dirección (azimut). Herramientas giroscópicos se pueden usar para medir Azimuth donde la encuesta se mide en un lugar con influencias perturbadoras externas magnéticas, "carcasa" dentro de, por ejemplo, donde el agujero está alineado con los tubulares de acero (tubos). Estos sensores, así como sensores adicionales para medir la densidad de la roca de formación, porosidad, la presión u otros datos, están conectados, física y digitalmente, a una unidad lógica que convierte la información en dígitos binarios que se transmite entonces a la superficie usando "pulso barro telemetría "(MPT, un sistema de transmisión de codificación binaria se utiliza con líquidos, tales como, combinatoria, la codificación Manchester, de fase partida, entre otros). Esto se hace mediante el uso de una unidad de fondo de pozo "generador de impulsos" que varía la presión de fluido de perforación (lodo) dentro de la sarta de perforación de acuerdo con la MPT elegido: estas fluctuaciones de presión se descodifican y se muestra en las computadoras del sistema superficie como formas de onda; salidas de tensión de los sensores (datos sin procesar); medidas específicas de la gravedad o las direcciones desde el norte magnético, o en otras formas, como las ondas sonoras, las formas de onda nucleares, etc. Superficie (barro) transductores de presión miden estas fluctuaciones de presión (pulsos) y pasan una señal de tensión analógica a la superficie computadoras que digitalizan la señal. Frecuencias perturbadoras son filtrados y la señal se decodifica de nuevo en su forma original de datos. Por ejemplo, una presión de 20 psi de fluctuación (o menos) puede ser "elegido" de un sistema de lodo presión total de 3,500psi o más. 17
- 18. Energía eléctrica y mecánica de fondo de pozo es proporcionado por los sistemas de fondo de pozo de turbina, que utilizan la energía de la corriente "fango", unidades de batería (litio), o una combinación de ambos Tipos de información transmiten [editar] Información direccional [editar] Herramientas MWD son generalmente capaces de tomar las encuestas de dirección en tiempo real. La herramienta utiliza acelerómetros y magnetómetros para medir la inclinación y el acimut del pozo en esa ubicación, y luego transmitir esa información a la superficie. Con una serie de encuestas; , se puede calcular la ubicación del pozo mediciones de inclinación, acimut, y la cara de la herramienta, a intervalos apropiados (en cualquier lugar de cada 30 pies (es decir, 10 m) a cada 500 pies). Por sí misma, esta información permite a los operadores para probar que su bienestar no cruza en áreas que no están autorizados a perforar. Sin embargo, debido al coste de los sistemas de MWD, que no se utilizan generalmente en pozos destinados a ser vertical. En cambio, los pozos son encuestados después de perforar a través del uso demúltiples herramientas tiro topografía bajados en la sarta de perforación en línea de acero o de telefonía fija. El uso principal de los levantamientos en tiempo real está en la perforación direccional. Para el perforador direccional para dirigir el pozo hacia una zona objetivo, tiene que saber dónde está el bien va, y lo que los efectos de sus esfuerzos de dirección son. Herramientas MWD también suelen proporcionar mediciones toolface para ayudar en la perforación direccional utilizando motores de lodo del fondo del pozo con subs dobladas o alojamientos dobladas. Para más información sobre el uso de mediciones toolface, consulte la perforación direccional. La mecánica de perforación de la información [editar] Herramientas MWD también pueden proporcionar información sobre las condiciones de la broca. Esto puede incluir: Velocidad de rotación de la sarta de perforación Suavidad de que la rotación Tipo y gravedad de cualquier vibración de fondo de pozo Temperatura de fondo de pozo Torque y peso sobre la barrena, medidos cerca de la broca Volumen de flujo del fango 18
- 19. Motores de barro El uso de esta información puede permitir que el operador para perforar el pozo de manera más eficiente, y para asegurar que la herramienta MWD y cualquier otra herramienta de fondo de pozo, tales como un motor de lodo, los sistemas rotativos direccionales y herramientas LWD, se operan dentro de sus especificaciones técnicas para prevenir fallo de la herramienta. Esta información también es valiosa para geólogos responsables de la información y de la formación que se está perforando. Propiedades de formación [editar] Muchas herramientas MWD, ya sea por cuenta propia, o en conjunto con herramientas LWD separados, puede tomar mediciones de propiedades de formación. En la superficie, estas mediciones se ensamblan en un registro, similar a la obtenida por la tala de telefoníafija. Herramientas LWD son capaces de medir un conjunto de características geológicas incluyendo densidad, porosidad, resistividad, acústico-pinza, la inclinación de la broca (NBI), la resonancia magnética y la presión de la formación. La herramienta MWD permite que estas medidas que deben adoptarse y evaluados, mientras que el pozo está siendo perforado. Esto hace que sea posible llevar a cabo el direccionamiento geológico, o la perforación direccional basada en las propiedades de formación medidas, en lugar de simplemente la perforación en un objetivo preestablecido. La mayoría de las herramientas MWD contienen un interno de rayos gamma sensor para medir los valores de rayos gamma natural. Esto se debe a que estos sensores son compactos, de bajo costo, confiable, y pueden tomar medidas a través de collares de perforación no modificados. Otras medidas a menudo requieren herramientas LWD separados, que se comunican con las herramientas MWD de fondo de pozo a través de cables internos. Medición durante la perforación puede ser rentable en los pozos de exploración, particularmente en las zonas del Golfo de México, donde se perforan pozos en áreas de sal diapirs. El registro de resistividad detectará penetración en sal, y la detección precoz evita daños sal al lodo de perforación bentonita. 19
- 20. Métodos de transmisión de datos [editar] Telemetría Mud-pulse [editar] Este es el método más común de transmisión de datos utilizado por las herramientas MWD. El fondo del pozo, una válvula es accionada para restringir el flujo del lodo de perforación (slurry) de acuerdo con la información digital a transmitir. Esto crea fluctuaciones de presión que representan la información. Las fluctuaciones de presión se propagan dentro del fluido de perforación hacia la superficie donde son recibidos de sensores de presión. En la superficie, las señales de presión recibidas son procesadas por computadoras para reconstruir la información. La tecnología está disponible en tres variedades: positivo pulso, negativa de pulso y onda continua. Pulso positivo Herramientas Positivo-pulso brevemente cerrar y abrir la válvula para restringir el flujo de lodo dentro de la tubería de perforación. Esto produce un aumento de la presión que puede ser visto en la superficie. Códigos de línea se utilizan para representar la información digital en forma de impulsos. Diagrama que muestra el MWD Pulso negativo Herramientas pulso negativo brevemente abrir y cerrar la válvula para liberar el lodo desde el interior del tubo de perforación a la corona circular. Esto produce una disminución de la presión que puede ser visto en la superficie. Códigos de línea se utilizan para representar la información digital en forma de impulsos. Onda continua (por wawan) Herramientas de onda continua gradualmente cerrar y abrir la válvula para generar fluctuaciones de presión sinusoidales dentro del fluido de perforación. Cualquier digital de modulación esquema con una fase continua se puede utilizar para imponer la información en una señal portadora. El esquema de modulación más ampliamente usado es la modulación de fase continua. 20
- 21. Cuando la perforación bajo balance se utiliza, barro telemetría de pulso puede quedar inutilizable. Esto es generalmente debido a que, con el fin de reducir la densidad equivalente del lodo de perforación, un gas compresible se inyecta en el barro. Esto hace que la señal de alto atenuación que reduce drásticamente la capacidad del lodo para transmitir datos de impulsos. En este caso, es necesario utilizar métodos diferentes de telemetría de pulso de lodo, como las ondas electromagnéticas que se propagan a través de la formación o cableada telemetría tubería de perforación. Tecnología de telemetría barro pulso actual ofrece un ancho de banda de hasta 40 bits / s. [2] La velocidad de datos cae al aumentar la longitud del pozo y es típicamente un precio tan bajo como 1,5 bits / s [3] -. 3,0 bit / s [ 2] (bits por segundo) a una profundidad de 35.000 pies - 40.000 pies (10668 m - 12.192 m). Superficie de comunicación agujero hacia abajo se realiza normalmente a través de cambios en los parámetros de perforación, es decir, el cambio de la velocidad de rotación de la sarta de perforación o cambio de la tasa de flujo de lodo. Realizar cambios en los parámetros de perforación con el fin de enviar la información puede requerir la interrupción del proceso de perforación, que es desfavorable debido al hecho de que hace tiempo no productivo. Telemetría electromagnética [editar] Estas herramientas incorporan un aislante eléctrico en la sarta de perforación. Para transmitir datos, la herramienta genera una diferencia de voltaje entre alterado la parte superior (la sarta de perforación principal, por encima del aislante), y la parte inferior (la broca, y otras herramientas situados por debajo del aislador de la herramienta MWD).En la superficie, un cable está unido a la cabeza del pozo, lo que hace contacto con la tubería de perforación en la superficie. Un segundo alambre está unido a una varilla de clavado en el suelo a cierta distancia. La cabeza de pozo y de la varilla de tierra forman los dos electrodos de una antena dipolo. La diferencia de voltaje entre los dos electrodos es la señal de recepción que es decodificada por un ordenador. La herramienta EM genera diferencias de tensión entre las secciones de la sarta de perforación en el patrón de muy baja frecuencia (2-12 Hz) olas. Se impone Los datos sobre las olas a través de digital de la modulación. Este sistema en general, ofrece velocidades de datos de hasta 10 bits por segundo. Además, muchas de estas herramientas también son capaces de recibir datos desde la superficie de la misma manera, mientras que las herramientas basadas barro de pulso-se basan en cambios en los parámetros de perforación, tales como velocidad de rotación de la sarta de perforación o la tasa de flujo de lodo, a enviar información desde la superficie a herramientas de perforación. Realizar cambios en los parámetros de perforación con el fin de enviar la información a las herramientas generalmente interrumpe el proceso de perforación, causando pérdida de tiempo. 21
- 22. En comparación con la telemetría de barro pulso, telemetría pulso electrónico es más eficaz en ciertas situaciones especializadas, tales como la perforación bajo balance o cuando se utiliza aire como fluido de perforación. Es capaz de transmitir datos hasta diez veces más rápido. Sin embargo, por lo general se queda corto cuando se perforan pozos excepcionalmente profundos, y la señal puede perder fuerza rápidamente en ciertos tipos de formaciones, convirtiéndose indetectable en sólo unos miles de pies de profundidad. Tubería de perforación Wired [editar] Varias compañías de servicios petroleros están desarrollando sistemas de tuberías de perforación con cable. Estos sistemas utilizan cables eléctricos incorporados en cada componente de la sarta de perforación, los cuales transportan señales eléctricas directamente a la superficie. Estos sistemas prometen velocidades de transmisión de datos de órdenes de magnitud mayor que cualquier cosa es posible con barro pulso o de telemetría electromagnético, ambos de la herramienta de fondo de pozo a la superficie y desde la superficie a la herramienta de fondo de pozo. El IntelliServ [4] red de tuberías por cable, que ofrecen velocidades de datos más de 1 megabit por segundo, se convirtió en comercial en 2006. Representantes de BP America, StatoilHydro, Baker Hughes INTEQ, y Schlumberger presentó tres casos de éxito utilizando este sistema, tanto en tierra como en alta mar, en el SPE / IADC Conferencia de Perforación marzo de 2008 en Orlando, Florida. [5] Herramientas recuperables [editar] Herramientas MWD se puede montar de forma semipermanente en un cuello de perforación (sólo extraíble en las instalaciones de servicio), o pueden ser autónomo y recuperables de telefonía fija. Herramientas recuperables, a veces conocidas como Herramientas delgados, pueden ser recuperados y reemplazados utilizando telefonía fija a través de la sarta de perforación. En general, esto permite que la herramienta se sustituirá mucho más rápido en caso de fallo, y permite que la herramienta puede recuperar si la sarta de perforación se atasca. Herramientas recuperables deben ser mucho más pequeño, por lo general alrededor de 2 pulgadas o menos de diámetro, aunque su longitud puede ser de 20 pies (6,1 m) o más. El pequeño tamaño es necesario para la herramienta para caber a través la sarta de perforación; Sin embargo, también limita las capacidades de la herramienta. Por ejemplo, las herramientas delgadas no son capaces de enviar datos a las mismas tarifas que las herramientas manuales de montaje, y también son más limitados en su capacidad para comunicarse y suministrar energía eléctrica a, otras herramientas LWD. 22
- 23. Herramientas Collar montado, también conocidas como herramientas de grasa, en general no pueden ser removidos de su cuello de perforación en el pozo. Si la herramienta falla, toda la sarta de perforación debe ser sacado del agujero para reemplazarlo. Sin embargo, sin la necesidad de pasar a través de la sarta de perforación, la herramienta puede ser más grande y más capaz. La capacidad de recuperar la herramienta a través de telefonía fija a menudo es útil. Por ejemplo, si la columna de perforación se queda atrapado en el agujero, entonces la recuperación de la herramienta a través de telefonía fija se ahorrará una cantidad considerable de dinero en comparación con dejarlo en el agujero con la parte de pegado de la sarta de perforación. Sin embargo, hay algunas limitaciones en el proceso. Limitaciones [editar] Recuperando una herramienta usando wireline no es necesariamente más rápido que tirando de la herramienta fuera del agujero. Por ejemplo, si la herramienta falla a 1.500 pies (460 m), mientras que la perforación con un aparejo triple (capaz de disparar 3 juntas de tubería, o alrededor de 90 pies (30 m) de los pies, a la vez), a continuación, por lo general, sería más rápido para tirar de la herramienta fuera del agujero de lo que sería para armar wireline y recuperar la herramienta, especialmente si la unidad de telefonía fija debe ser transportado a la plataforma. Recuperaciones Wireline también introducen un riesgo adicional. Si la herramienta se desprende de la telefonía fija, entonces volverá a caer abajo de la columna de perforación.Esto generalmente causar graves daños a la herramienta y los componentes de la sarta de perforación en el que se asiente, y requerirá la sarta de perforación que ser sacado del agujero para reemplazar los componentes defectuosos; esto se traduce en un coste total superior a sacar del agujero en el primer lugar. El engranaje de telefonía fija también puede fallar para adherirse a la herramienta, o, en el caso de un fallo grave, podría traer sólo una porción de la herramienta a la superficie. Esto requeriría la sarta de perforación que ser sacado del agujero para reemplazar los componentes defectuosos, con lo que la operación de telefonía fija una pérdida de tiempo. Referencias [editar] 1. Salta^ Dowell, Iain; Andrew Mills; Matt Lora (2006). "Capítulo 15 - Perforación- Adquisición de Datos". En Robert F. Mitchell. Petróleo Manual de Ingeniería. II - Ingeniería de Perforación.Sociedad de Ingenieros de Petróleo. pp. 647-685. ISBN 978- 1-55563-114-7. 2. ^ Saltar a:un b "telemetría Mud-pulso ve paso a cambio de mejoría con oscilantes válvulas de corte". 2008. Consultado el veintitrés de marzo de 2 009. 3. Salta^ "Orion II Sistema MWD". 2009. Consultado el veintitrés de marzo de 2009. 4. Salta^ "Red Intelliserv". 2008. Consultado el 13 de marzo de 2008. 5. Saltar a^. "TH Ali, y otros, SPE / IADC 112636: High Speed Telemetría Taladro red de tuberías Optimiza perforación Dinámica y del pozo de colocación; TS Olberg et al, SPE / IADC 112702: La utilización de la enorme cantidad de tiempo real. datos adquiridos en 23
- 24. Wired-tubería de perforación Operaciones; V. Nygard et al, SPE / IADC 112742:. Un cambio de ritmo en total Enfoque sistema a través de tuberías de perforación Wired- Tecnología ". 2008. Consultado el 13 de marzo de 2008 MDW Métodos de telemetría tuvieron dificultades para hacer frente a los grandes volúmenes de datos de fondo de pozo, por lo que la definición de MWD se amplió para incluir los datos que se almacenan en la memoria de la herramienta y se recuperaron cuando la herramienta fue devuelto a la superficie. Todos los sistemas MWD suelen tener tres principales subcomponentes: Sistema de poder Sistema de telemetría Sensor direccional Los sistemas de energía Los sistemas de energía en MWD general se pueden clasificar como uno de dos tipos: la batería o turbina. Ambos tipos de sistemas de energía tienen ventajas y responsabilidades inherentes. En muchos sistemas de MWD, una combinación de estos dos tipos de sistemas de energía se utiliza para proporcionar energía a la herramienta MWD por lo que no se interrumpe la alimentación durante condiciones de flujo de fluidos de perforación intermitentes. Las baterías pueden proporcionar este poder independiente de la circulación del fluido de perforación, y son necesarios si se producirá el registro durante el disparo en o fuera del agujero. Sistemas de baterías Baterías de cloruro de litio-tionilo se utilizan comúnmente en los sistemas MWD debido a su excelente combinación de densidad de alta energía y un rendimiento superior a las temperaturas de servicio MWD. Proporcionan una fuente de voltaje estable hasta muy cerca del final de su vida útil, y que no requieren electrónica compleja para acondicionar el suministro. Estas baterías, sin embargo, han producción de energía instantánea limitado, y que pueden ser inadecuados para las aplicaciones que requieren un alto consumo de corriente. Aunque estas baterías son seguros a temperaturas más bajas, si se calienta por encima de 180 ° C, pueden someterse a una reacción acelerada violento y estallan con fuerza significativa. Como resultado, hay restricciones en el envío baterías de cloruro de litio-tionilo en aviones de pasajeros. A pesar de que estas baterías son muy eficientes durante su vida útil, que no son recargables, y su eliminación está sujeta a estrictas normas ambientales. Sistemas de turbinas 24
- 25. La segunda fuente de generación de energía abundante, potencia de la turbina, utiliza el flujo del fluido de perforación de la plataforma. Fuerza de rotación se transmite por un rotor de turbina a un alternador a través de un eje común, generando una corriente alterna trifásica (AC) de frecuencia variable. La circuitería electrónica rectifica la AC en corriente continua utilizable (DC). Rotores de turbina para este equipo deben aceptar una amplia gama de caudales para dar cabida a todas las posibles condiciones de barro de bombeo. Del mismo modo, los rotores deben ser capaces de tolerar los desechos considerable y el material de pérdida de circulación (LCM) arrastrado en el fluido de perforación. Sistemas de telemetría Telemetría Mud-pulso es el método estándar en MWD comercial y la tala durante la perforación (LWD) sistemas. Sistemas acústicos que transmiten la tubería de perforación sufren una atenuación de aproximadamente 150 dB por 1,000 m de fluido de perforación. [1] Varios intentos se han hecho para construir la tubería de perforación especial con un cableado integral. Aunque ofrece excepcionalmente altas velocidades de datos, el método de telemetría cableado integral requiere: Caro tubería de perforación especial Manejo especial Cientos de conexiones eléctricas que todos deben seguir siendo fiable en condiciones difíciles La explosión de las mediciones de fondo de pozo ha estimulado nuevo trabajo en esta área, y / segundo se han demostrado tasas de datos de más de 2.000.000 bits. Transmisión electromagnética de baja frecuencia está en uso comercial limitado en los sistemas MWD y LWD. Se utiliza a veces cuando se utiliza aire o espuma como fluido de perforación. La profundidad de la que telemetría electromagnético puede ser transmitida está limitada por la conductividad y el grosor de las formaciones suprayacentes. Los repetidores o amplificadores de señal situados en la sarta de perforación se extienden la profundidad de la que los sistemas electromagnéticos pueden transmitir de forma fiable. Tres sistemas de telemetría de pulso de lodo están disponibles:-pulso positivo, pulsos negativos, y los sistemas de onda continua. Estos sistemas se denominan según las formas en que sus impulsos se propagan en el volumen de lodo. Negativo sistemas de impulsos crean un impulso de presión menor que la del volumen de lodo ventilando una pequeña cantidad de lodo sarta de perforación de alta presión de la tubería de perforación a la corona circular. Sistemas Positivo-pulso crear una restricción de flujo momentáneo (mayor presión que el volumen de perforación de barro) en la tubería de perforación. Sistemas de onda continua crean una frecuencia portadora que se transmite a través del barro, y se codifican los datos utilizando los desplazamientos de fase de la portadora. Muchos sistemas de datos de codificación diferentes se utilizan, que a menudo están diseñados para optimizar la vida y la fiabilidad del generador de impulsos, ya que debe sobrevivir al contacto directo con el, flujo de lodo de alta presión abrasiva. 25
- 26. Detección de señal de telemetría se lleva a cabo por uno o más transductores situados en el tubo vertical de equipo de perforación. Los datos se extraen de las señales de los equipos informáticos superficie ya sea alojado en una unidad de deslizamiento o en el piso de perforación. El éxito de decodificación de datos es altamente dependiente de la relación señal-ruido. Existe una estrecha correlación entre el tamaño de la señal y la velocidad de datos de telemetría; cuanto mayor sea la velocidad de datos, menor será el tamaño pulso se vuelve. La mayoría de los sistemas modernos tienen la capacidad de reprogramar parámetros de telemetría de la herramienta y ralentizar la velocidad de transmisión de datos sin tropezar fuera del agujero; Sin embargo, la desaceleración de la velocidad de datos afecta negativamente a la densidad de datos de registro. El ruido de la señal Las fuentes más notables de ruido de la señal son las bombas de lodo, que a menudo crean un ruido de alta frecuencia relativamente. La interferencia entre frecuencias de bomba provoca armónicos, pero estos ruidos de fondo se puede filtrar a cabo con técnicas analógicas. Sensores de la bomba de velocidad puede ser un método muy eficaz de identificación y eliminación de ruido de la bomba de la señal de telemetría prima. El ruido de baja frecuencia en el volumen de lodo a menudo se genera por los motores de perforación. Bueno profundidad y barro tipo también afecta a la amplitud de la señal recibida y la anchura. Lodos En general, los lodos a base de aceite (OBM) y con base pseudo-petróleo son más compresible que los lodos a base de agua; por lo tanto, dan lugar a las mayores pérdidas de señal. Sin embargo, las señales se han recuperado sin problemas significativos de profundidades de casi 9.144 m (30.000 pies) en fluidos compresibles. Sensores direccionales El estado del arte en la tecnología direccional-sensor es un conjunto de tres magnetómetros de saturación ortogonales y tres acelerómetros. Aunque en circunstancias normales, los sensores direccionales estándar proporcionan encuestas aceptables, cualquier aplicación en la que existe incertidumbre en la ubicación de fondo de pozo puede ser problemático. Las tendencias recientes para perforar pozos más y más complejas centraron la atención en la necesidad de un modelo de error estándar. El trabajo realizado por el Comité Directivo de la Industria de Precisión del pozo (ISCWA) tuvo como objetivo proporcionar un método estándar para la cuantificación de las incertidumbres posicionales con niveles de confianza asociados. Las principales fuentes de error se clasificaron: Errores en los sensores Las interferencias magnéticas de la BHA Desalineación Herramienta Campo magnético incertidumbre Junto con las incertidumbres en la profundidad medida, las incertidumbres de la encuesta de fondo de pozo son un contribuyente a errores en la profundidad absoluta. Tenga en cuenta que todos los métodos de corrección de azimut en tiempo real 26
- 27. requieren datos en bruto para ser transmitida a la superficie, lo que impone carga en el canal de telemetría. El desarrollo del giroscopio (giroscopio) -navigated MWD ofrece ventajas significativas sobre los sensores de navegación existentes. Además de una mayor precisión, giroscopios no son susceptibles a la interferencia de campos magnéticos. Tecnología de giroscopio actual se centra en la incorporación de robustez mecánica, reduciendo al mínimo el diámetro externo, y la superación de sensibilidad a la temperatura. La principal aplicación de la tecnología está en el ahorro del tiempo de equipo utilizado por giroscopios de telefonía fija en el ejercicio de patadas de salida de las zonas afectadas por la interferencia magnética. Entorno operativo Herramienta y fiabilidad herramienta Sistemas MWD se utilizan en los entornos operativos más duros. Condiciones evidentes, tales como alta presión y temperatura son muy familiares a los ingenieros y diseñadores. La industria de la telefonía fija tiene una larga historia de superar con éxito estas condiciones. Temperatura La mayoría de las herramientas MWD pueden funcionar de forma continua a temperaturas de hasta 150 ° C, con algunos sensores disponibles con puntuaciones de hasta 175 ° C. Temperaturas MWD-herramienta puede ser 20 ° C más baja que las temperaturas de formación medidos por registros por cable, debido al efecto de enfriamiento de la circulación del fango, por lo que las temperaturas más altas encontradas por herramientas MWD son los medidos mientras se ejecuta en un agujero en el que el volumen del fluido de perforación No se ha distribuido durante un período prolongado. En tales casos, es recomendable para romper la circulación periódicamente mientras se ejecuta en el agujero. Usando un matraz Dewar para proteger los sensores y la electrónica de las altas temperaturas es común en wireline, donde los tiempos de exposición de fondo de pozo son generalmente cortos, pero utilizando matraces de protección de la temperatura no es práctico en MWD debido a los largos tiempos de exposición a altas temperaturas que debe ser soportado. Presión Presión de fondo no es tanto un problema de temperatura para los sistemas MWD. La mayoría de las herramientas están diseñadas para soportar hasta 20.000 psi, con herramientas especializadas calificadas a 25.000 psi. La combinación de la presión hidrostática y la contrapresión del sistema rara vez se acerca a este límite. Choque de fondo de pozo y la vibración Vibración presentes sistemas MWD con sus retos más graves golpes de fondo de pozo y. Contrariamente a lo esperado, las primeras pruebas utilizando sistemas de fondo de pozo instrumentados mostraron que las magnitudes de los choques laterales (de lado a lado) son dramáticamente mayor que los choques axiales durante la perforación normal. Modem herramientas MWD están generalmente diseñados para resistir a los 27
- 28. choques de aproximadamente 500 G durante 0,5 ms durante una vida útil de 100.000 ciclos. Choque torsional, producido por stick / deslizarse aceleraciones de torsión, también puede ser importante. Si se somete a repetidos stick / slip, las herramientas se pueden esperar a fallar. Estadísticas de confiabilidad Herramienta Los primeros trabajos hace para estandarizar la medición y reporte de estadísticas de fiabilidad MWD-herramienta se centraron en la definición de un fracaso y dividiendo el número total de horas que circulan con éxito por el número total de fracasos. Este trabajo resultó en un tiempo medio entre fallos número (MTBF). Si los datos se acumularon durante un período estadísticamente significativo (típicamente 2.000 horas), las tendencias de la insuficiencia de análisis significativos podrían derivarse. Como herramientas de fondo de pozo se hicieron más complejas, sin embargo, la Asociación Internacional de Contratistas de Perforación (IADC) publicó recomendaciones sobre la adquisición y el cálculo de las estadísticas de MTBF MWD 28
- 29. La evaluación de las propiedades físicas, generalmente la presión, la temperatura y la trayectoria del pozo en el espacio tridimensional, durante la extensión de un pozo. La adquisición de mediciones durante la perforación (MWD) es ahora una práctica estándar en los pozos direccionales marinos, en los que el costo de las herramientas es compensado por el tiempo de equipo de perforación y las consideraciones asociadas con la estabilidad del pozo si se utilizan otras herramientas. Las mediciones se adquieren en el fondo del pozo, se almacenan un cierto tiempo en una memoria de estado sólido y posteriormente se transmiten a la superficie. Los métodos de transmisión de datos varían entre una compañía y otra, pero generalmente consisten en la codificación digital de los datos y su transmisión a la superficie como pulsos de presión en el sistema de lodo. Estas presiones pueden ser ondas senoidales positivas, negativas o continuas. Algunas herramientas MWD poseen la capacidad para almacenar las mediciones para su recuperación posterior con cable o cuando la herramienta se extrae del pozo si el enlace de transmisión de datos falla. Las herramientas MWD que miden los parámetros de una formación (resistividad, porosidad, velocidad sónica, rayos gamma) se conocen como herramientas de adquisición de registros durante la perforación (LWD). Las herramientas LWD utilizan sistemas similares de almacenamiento y transmisión de datos, y algunas poseen más memoria de estado sólido para proporcionar registros de mayor resolución después de extraer la herramienta, que la que es posible con el sistema de transmisión de pulsos a través del lodo con un ancho de banda relativamente bajo. La herramienta LWD (Loggig While Drilling- Registro durante la perforación), se utiliza para registrar el pozo mientras se está perforando, de este modo, se obtiene información a tiempo real. Esta herramienta, relativamente nueva, la cual inicio su comercialización en la década de los ochenta, ha incremento su utilización alrededor del mundo con mucho éxito a tal grado que su uso es cada día más común, haciendo posible la optimización de la perforación en diversos aspectos. Las primeras herramientas MWD fueron desarrolladas a comienzos de la década de 1970 para medir las propiedades relacionadas con la perforación, tales como la inclinación y el azimut, que son esenciales en las operaciones de perforación direccional. Importantes mediciones adicionales, tales como el esfuerzo de torsión, el peso sobre la barrena (WOB, por sus siglas en ingles) y la temperatura, permiten a los perforadores y a los ingenieros de perforación vigilar rutinariamente (monitorear) los parámetros de desempeño de la perforación en el fondo del pozo, en tiempo real, en lugar de inferirlos a partir de las mediciones de superficie. La tecnología MWD, está relacionada primordialmente para dirigir eficazmente la posición del pozo, esto resulta crucial para permitir que los perforadores direccionales ajusten las trayectorias de los pozos para dar cabida a la información geológica nueva proveniente de los registro LWD en tiempo real. 29
- 30. Las herramientas LWD, en forma general están compuestas básicamente por: a) Sección se sensores: toma los registros. b) Sección de Interfaces (modelo de control): codifica los registro y manda a la sección de transmisión c) Sección de Transmisión: envía los datos a superficie. d) Equipo de superficie: se interpretan los datos y leen en software a tiempo real. VENTAJAS *Reducción del tiempo de perforación. *Ahorro en los costos de operación. *Toma de decisiones de tiempo real. *Producción anticipada. *Mejora la productividad en pozos horizontales. 30